CANopen • 127
Netzwerkaufbau
5.2.3 Topologie
Für den Aufbau eines einfachen CANopen Netzwerkes benötigen Sie neben einem CANopen Feldbusknoten einen Master (PC mit PC-Feldbuskarte CANopen), ein Verbindungskabel und ein DC 24 V Netzgerät für die Spannungsversorgung.
Das CANopen Netzwerk wird als Linienstruktur mit Abschlusswiderständen (120 Ohm) aufgebaut.
In Systemen mit mehr als zwei Stationen werden alle Teilnehmer parallel verdrahtet. Hierzu ist das Buskabel unterbrechungsfrei durchzuschleifen. Die maximale Länge für einen Leitungsabzweig sollte 0,3 m nicht überschreiten.
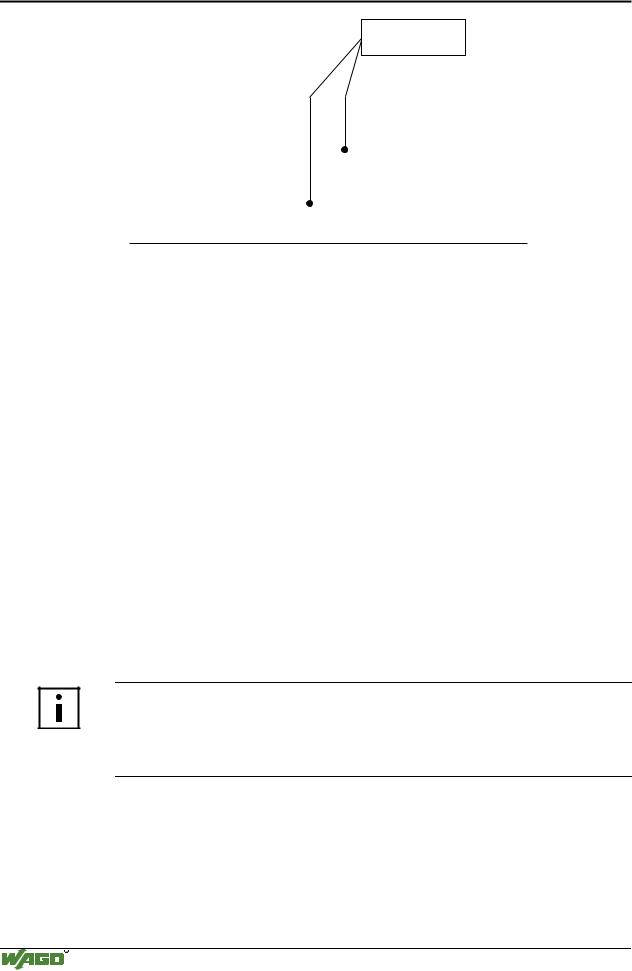
Linie, Bus
Netzwerk Knoten
Abb. 5-2: Bus-Topologie eines CANopen-Netzwerkes |
g012441d |
Alle Teilnehmer im Netz kommunizieren mit der gleichen Baudrate. Die Busstruktur erlaubt das rückwirkungsfreie Einund Auskoppeln von Stationen oder die schrittweise Inbetriebnahme des Systems.
Spätere Erweiterungen haben keinen Einfluss auf Stationen, die bereits in Betrieb sind. Wenn ein Teilnehmer ausfällt oder dem Netz neu hinzugefügt wird, wird dieses automatisch erkannt.
Über Routerknoten sind auch Abzweigungen von dem linienförmigen Bus und somit der Aufbau hierarchischer Netzstrukturen möglich.
Mit dem Einsatz von Repeatern kann die maximal mögliche Anzahl von 110 Knoten erhöht und die Netzausdehnung (Buslänge) vergrößert werden. Obwohl die Ausdehnung des Netzes abhängig von der Übertragungsrate ist, ist CAN auch für ausgedehnte Netze einsetzbar. Die dabei erreichbaren Datenraten liegen in denselben Größenordnungen wie bei anderen Bussystemen. Wegen der Signalverzögerung wird die maximal mögliche Leitungslänge jedoch um 20 – 30 m pro Repeater reduziert.
WAGO-I/O-SYSTEM 750
CANopen