Материал: m013800e
1.3Methods of decentralisation
By using the coupler or the controller it is possible to realise various methods for the decentralisation of control tasks.
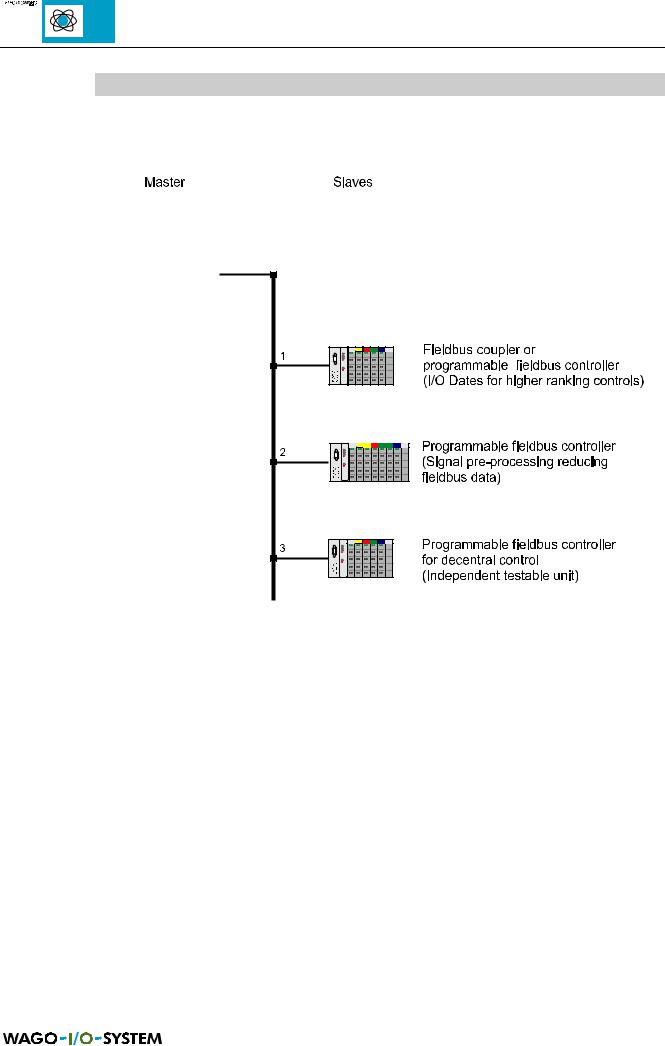
Fig. 1.9: Decentralisation methods
Central control using a coupler or a controller (1)
The process methods common to date: All input sensor signals are joined in the coupler (Slave) and led to the higher ranking controls (Master) via a bus system. The data generated for signal output in the higher ranking controls reaches the actuators via bus and nodes. The reaction time of the controls is dependent upon the fieldbus.
This principle can be performed in the same manner using the controller.
Signal pre-processing using controller (2)
Certain control tasks, e.g. impulse generation, delays and counts (e.g. quantity), are taken care of on site. The logic operations required are processed in the controller. The bus system only transmits the results of the logic operations as process data to the higher ranking controls. For signal pre-processing the amount of fieldbus data required is less than that required for a central connection.
6 |
MODBUS / Introduction |
15.12.99

Decentral control with controller (3)
The on site controller controls an assigned function area, e.g. a machine unit or components of a transport system. The unit test can be made independently, i.e. without higher ranking controls.
The higher ranking controls transmit data to the controller via the bus system, e.g. the operating mode, set point values or the current production program (recipe). The controller transmits local operating data to the higher ranking controls, such as operating and control messages, actual values, counter readings etc. The complete linking for actuator triggering is made in the controller, in other words directly on site. This permits a fieldbus independent reaction of the controls.
In the case of a fieldbus failure the control program can be independently further processed and the node put into a defined status.
MODBUS / Introduction |
7 |
15.12.99

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
MODBUS / Introduction |
||
15.12.99
2 MODBUS Coupler/Controller
2.1 Hardware
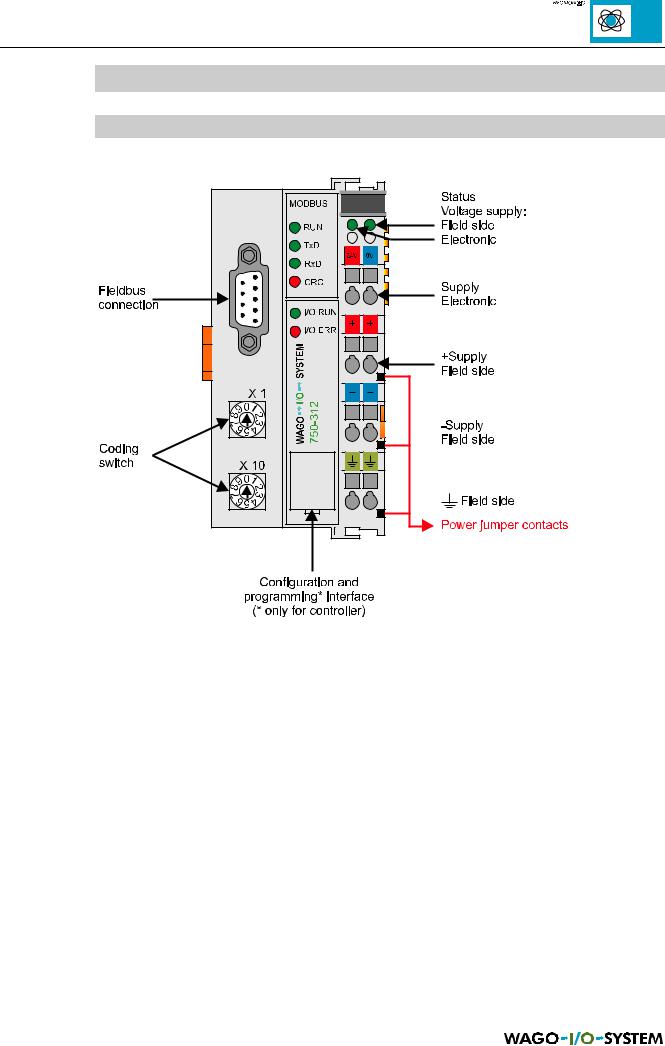
Fig. 2.1: MODBUS coupler/controller
The illustration above applies both to the MODBUS coupler as well as for the MODBUS controller.
Each coupler/controller comprises of two enclosure sections:
left: |
enclosure for the electronics for bus connection and processing |
right: |
a fixed installed power supply module as connection and distribution for the |
|
power supply to the electronics in the coupler/controller enclosure, the |
|
assembled I/O modules and the power supply in the field area. |
MODBUS / Coupler/controller |
9 |
15.12.99
2.2 Power supply
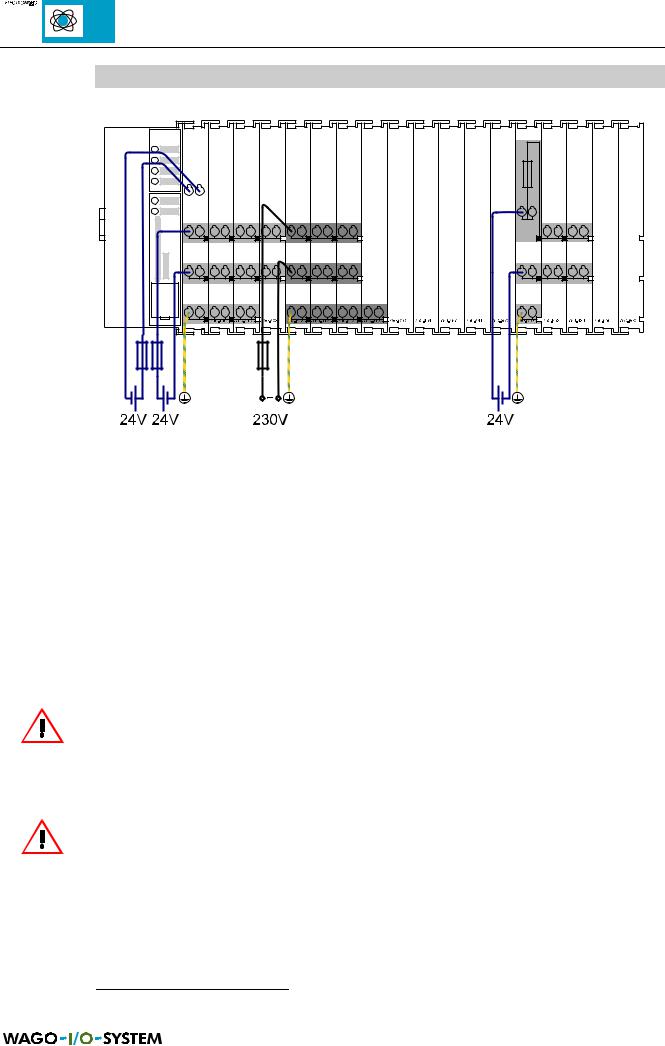
Fig. 2.2: Power supply
The power supply on the field side is electrically isolated from the electronic supply. In this manner sensors and actuators can be supplied and fused by a separate voltage source.
If a non-regulated power supply is used for the 24 V voltage supply of the coupler/controller electronics, it must be ensured that they are supported by a capacitor (200 µF per 1 A load current). To this effect a back-up capacitor module 1 was developed for the WAGO-I/O SYSTEM. This module serves for smoothing an unstable 24 V DC voltage supply, in as much as the specified voltage deviation required cannot be maintained. Cause for these fluctuations could be a voltage interruption on the primary side, a secondary side overload or the switching of “non quenched” inductivity and capacities.
ATTENTION!
Under no circumstances connect a voltage supply other than 24 V DC on the + and – power supply modules of the coupler/controller. A power supply voltage of max. 230 V AC can only be supplied via the power supply modules 750-609, 750-611 and 750-612!
ATTENTION!
Disconnect the PE lead wires prior to undertaking an insulation test, otherwise this will result in incorrect results or destruction of the I/O module.
1 Back-up capacitor module, Order No. 288-824 |
|
10 |
MODBUS / Coupler/controller |
15.12.99