Материал: m012800p
1.2Montagem
Todos os componentes do sistema podem ser diretamente engatados em um trilho de sustentação de acordo com a norma EN 50022 (TS 35). A montagem é fácil e não ocupa muito espaço. Os terminais têm todos o mesmo modelo, por forma a manter o esforço de projeção no mínimo.
A ordem dos terminais analógicos e digitais é irrelevante para o engate. O posicionamento seguro e a ligação do acoplador/controlador e dos diversos terminais bus é efetuado por meio de um sistema de encaixe de molas. Devido ao travamento automático, depois da montagem, os vários componentes encontram-se bem fixados no trilho.
patilha de destravamento
fixar
soltar
O acoplador/controlador tem de ser fixado no trilho de sustentação com o disco de travamento lateral cor de laranja.
Para retirar o acoplador/controlador, deve soltarse o disco de travamento e puxar-se a patilha de destravamento cor de laranja.
Para fixar o acoplador/controlador, carrega-se com uma chave de fendas sobre a ranhura superior do disco de travamento.
Para retirar o acoplador/controlador deve soltarse novamente o disco de travamento, carregando sobre a ranhura inferior.
Figura 1.2: Acoplador/controlador, disco de travamento
Ao puxar uma patilha de destravamento também é possível soltar um terminal bus do conjunto.
Fig. 1.3: Soltar terminal bus
Não se esqueça que este procedimento a tensão de alimentação do nível de campo e a transferência de dados e interrumpido. Deve assegurar-se que não ocorra nenhum estado passível de constituir perigo quer para as pessoas quer para os aparelhos devido à interrupção de PE !
MODBUS / Introdução |
3 |
01-03-16 |
|
|

Através de uma ligação CAGE CLAMP® é efetuada a ligação rápida, resistente a vibrações e sem qualquer manutenção dos condutores com uma seção transversal de 0,08 bis 2,5 mm². Para tanto, deve inserir uma chave de fendas ou qualquer outra ferramenta adequada para o efeito na abertura situada por baixo da ligação. É assim, que funciona o CAGE CLAMP®. Em seguida,
Fig. 1.4: Enfiar as pontas dos condutores pode inserir o condutor na respetiva abertura. Ao retirar a ferramenta o condutor fica apertado.
A força de aperto adapta-se automaticamente à seção transversal. A mola de tração exerce pressão em toda a extensão do condutor sem o danificar. As deformações do condutor são compensadas e impede-se que a mola se solte. O ponto de transição entre o condutor e o CAGE CLAMP® está protegido de forma eficaz contra a corrosão. A ligação pode ser estabelecida rapidamente e, além disso, não requer qualquer tipo de manutenção, evitando os custos de controles periódicos dos acoplamentos de aperto.
Os terminais de alimentação do WAGO-I/O- SYSTEM 750 estão parcialmente equipados com um dispositivo de suporte do fusível. Para comutar os terminais seguintes sem tensão, deve retirar-se o dispositivo de suporte do fusível. Para tal, pode inserir uma chave de fendas em uma das ranhuras existentes em ambos os lados e levantar o suporte.
Fig. 1.5: Retirar o disp. de suporte do fusível
Se dobrar a tampa do dispositivo de suporte do fusível para baixo, pode retirar ou inserir o fusível do suporte. Em seguida, feche novamente a tampa e desloque o dispositivo de suporte do fusível para a posição inicial.
Fig. 1.6: Abrir dispositivo de suporte do fusível
Fig. 1.7: Substituir o fusível
4 |
MODBUS / Introdução |
|
01-03-16 |
|
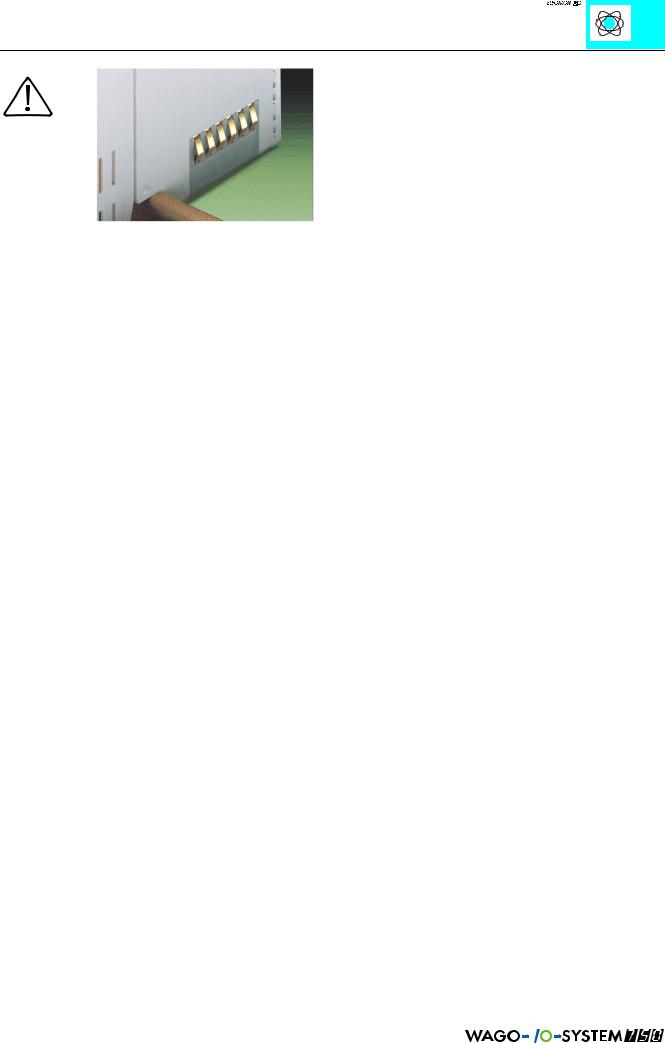
Os módulos de terminais não podem ser colocados sobre os contatos de molas douradas para evitar sujidade e arranhões!
Fig. 1.8: Contatos dourados
MODBUS / Introdução |
5 |
01-03-16 |
|
|
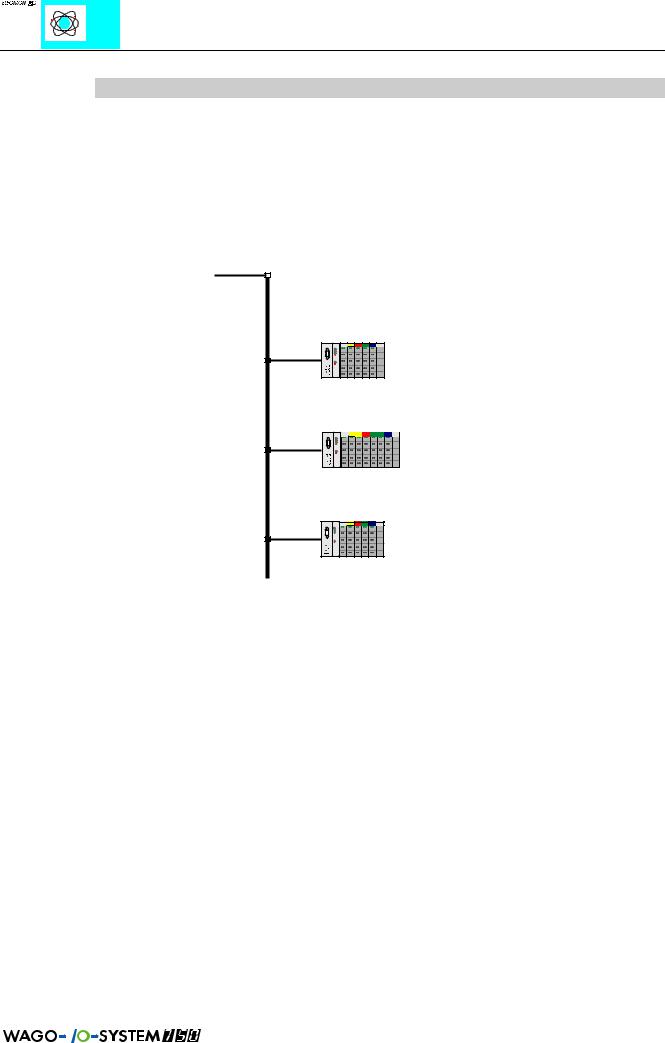
1.3Processo da descentralização
Com a utilização do acoplador ou do controlador é possível efetuar processos diferentes para a descentralização de tarefas de comando.
Master |
|
Slaves |
|
|
|
|
|
|
1
2
3
Fig. 1.9: Processo de descentralização
Acoplador do bus de campo/ ou controlador do bus de campo programável
(dados I/O para comando superior)
Controlador do bus de campo programável para o por o pré pro cessamento do sinal (redução dos dados de bus de campo)
Controlador do bus de campo programável para o comando descentralizado
(unidade que efetua autonomamente ensaios)
Comando central com acoplador ou controlador (1)
Modo de procedimento utilizado até à data: todos os sinais de entrada dos sensores são reunidos no acoplador (Slave) e conduzidos através de um sistema de bus ao comando superior (Master), onde a totalidade da ligação é efetuada, já que no acoplador não se realizam nenhumas ligações. Os dados gerados no comando superior para a saída do sinal chegam aos atuadores por meio de terminais e nós. A reação temporal do comando depende do bus de campo.
Este princípio também é aplicável ao controlador.
Pré-processamento do sinal com controlador (2)
Determinadas tarefas de comando como p. ex. formação de impulsos, atrasos e contagem (p. ex. unidades), são efetuadas no próprio local. As ligações necessárias para tal são processadas no controlador. O sistema de bus transfere o resultado das ligações como dados do processo para o comando superior. No pré-processamento do sinal a quantidade dos dados do bus de campo é mais reduzida quando comparada com um processamento central.
6 |
MODBUS / Introdução |
|
01-03-16 |
|

Comando descentralizado com controlador (3)
O controlador local comanda uma área de funcionamento atribuída, p. ex. um grupo da máquina ou os componentes de uma instalação de transporte. O ensaio da unidade pode ser efetuado de forma autônoma, isto é, sem o comando superior.
O comando superior envia dados centrais para o controlador através do sistema bus, p. ex. dados do modo de funcionamento, dos valores nominais ou do programa de produção atual (fórmula). O controlador envia os dados de operação locais para o comando superior, tais como mensagens de serviço e de avarias, valores reais, níveis do contador, etc. Toda a ligação ao comando dos atuadores é efetuada no controlador, ou seja, diretamente no local, alcançando assim uma reação independente do bus de campo do comando.
No caso de avaria de um bus de campo é possível continuar a executar autonomamente o programa de comando e o nó pode ser conduzido para um estado definido.
MODBUS / Introdução |
7 |
01-03-16 |
|
|