Материал: Лекция по Динамике
Геометрия масс
Рассмотрим
механическую систему, которая состоит
из конечного числа
![]() материальных точек с массами
материальных точек с массами
![]() ,
а положение точек в пространстве задается
радиус-векторами
,
а положение точек в пространстве задается
радиус-векторами
![]() ,
то
,
то
Ц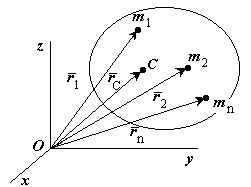 ентром
масс механической системы называется
геометрическая точка С, радиус-вектор
которой
ентром
масс механической системы называется
геометрическая точка С, радиус-вектор
которой
![]() определяется выражением
определяется выражением
![]()
где ![]() - масса системы.
- масса системы.
Если механическая
система представляет собой сплошное
тело, то его разбивают на элементарные
частицы с бесконечно малыми массами
![]() .
Суммы в пределе переходят в интегралы
и центр масс определяется выражением
.
Суммы в пределе переходят в интегралы
и центр масс определяется выражением
![]()
Центр масс является не материальной точкой, а геометрической. Центр масс характеризует распределение масс в системе.
Координаты центра масс имеют вид:
![]()
![]()
![]()
![]()
![]()
![]()
Для тел типа тонкого
листа (поверхность) и тонкой проволоки
(линия)
![]() и
и
![]() ,
где
,
где
![]() - поверхностная и линейная плотности
соответственно. Интегралы вычисляются
по поверхности и линии.
- поверхностная и линейная плотности
соответственно. Интегралы вычисляются
по поверхности и линии.
Моменты инерции
Для характеристики распределения масс в телах при рассмотрении вращательных движений требуется ввести понятия моментов инерции.
Момент инерции относительно точки
Скалярная величина
![]() или
или ![]()
называется полярным моментом инерции относительно точки О. d – расстояние от текущей точки до точки О.
Момент инерции относительно оси
Скалярная величина
![]() или
или ![]()
называется моментом инерции относительно оси l. r – расстояние от точки до оси.
Моменты инерции одинаковых по форме однородных тел, изготовленных из разных материалов, отличаются друг от друга. Характеристикой, не зависящей от массы материала, является радиус инерции.
Величина
![]() называется радиусом инерции.
называется радиусом инерции.
Момент инерции
относительно оси через радиус инерции
относительно этой же оси определяется
выражением ![]() .
.
Моменты инерции относительно осей координат
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Центробежные моменты инерции
![]()
![]()
![]()
![]()
![]()
![]()
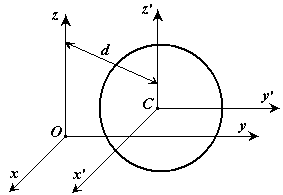
Установим зависимость между моментами инерции относительно параллельных осей, одна из которых проходит через центр масс.
Теорема о моментах инерции относительно параллельных осей. (Теорема Штейнера)
Момент инерции
системы относительно какой-либо оси
равен моменту инерции относительно
параллельной оси, проходящей через
центр масс, плюс произведение массы
системы на квадрат расстояния между
этими осями.
![]()
Доказательство:
Пусть имеется две декартовы системы
координат
и
![]() ,
оси которых параллельны. Начало системы
находится в центре масс системы. Докажем
теорему для осей
и
,
оси которых параллельны. Начало системы
находится в центре масс системы. Докажем
теорему для осей
и
![]() .
.
![]()
![]()
Координаты связаны между собой соотношениями:
![]() ,
, ![]() ,
, ![]()

![]() ,
, ![]() ,
, ![]() .
.
Следовательно
![]() ,
что и требовалось доказать.
,
что и требовалось доказать.
Главными осями инерции называются оси, в которых центробежные моменты инерции равны нулю.
Моменты инерции тела относительно главных осей инерции называются главными моментами инерции тела.
Тензор инерции и тензор инерции для главных осей:
Моменты инерции простейших тел
1. Однородный стержень
2. Прямоугольная пластина
3. Однородный круглый диск
Лекция 6
Краткое содержание: Общие теоремы динамики системы и твердого тела: Количество движения системы. Теорема об изменении количества движения системы. Законы сохранения количества движения. Теорема о движении центра масс. Момент количества движения твердого тела относительно оси вращения при вращательном движении твердого тела. Момент количества движения системы. Теорема об изменении момента количества движения системы. Законы сохранения момента количества движения. Кинетическая энергия системы. Кинетическая энергия твердого тела. Теорема об изменении кинетической энергии системы.
Общие теоремы динамики системы и твердого тела Количество движения системы.
Количеством
движения системы материальных
точек
![]() называется векторная сумма количеств
движений отдельных точек системы.
называется векторная сумма количеств
движений отдельных точек системы.
![]()
Единицей измерения
количества движения в СИ является –
![]()
Количество движения
системы можно выразить через массу
системы и скорость центра масс. ![]()
Теорема об изменении количества движения системы.
Эта теорема существует в трех различных формах.
Теорема. Производная по времени от количества движения системы равна векторной сумме всех внешних сил, действующих на систему.
![]() ,
(6.1)
,
(6.1)
Доказательство: Теорема об изменении количества движения для точки имеет вид:
![]() ,
,
![]()
Сложим все уравнений и получим:
![]() ,
,
что и требовалось доказать.
В проекциях на оси координат это утверждение выглядит так:
![]() ,
, ![]() ,
, ![]() .
.
Теорема. (в дифференциальной форме). Дифференциал от количества движения системы равен сумме элементарных импульсов всех внешних сил, действующих на систему.
Умножим левую и правую части уравнения (6.1) на и получим