Материал: Лекция по Динамике
Принцип Даламбера для материальной точки
Уравнение движения материальной точки относительно инерциальной системы отсчета под действием приложенных активных сил и сил реакции связей имеет вид:
![]() ,
,
![]() - равнодействующая
активных сил,
- равнодействующая
активных сил,
![]() - равнодействующая сил реакции связей.
- равнодействующая сил реакции связей.
Силой инерции
материальной точки называют произведение
массы точки на вектор ускорения, взятое
с обратным знаком, т.е.
![]() .
.
Если использовать
понятие силы инерции, то основной закон
динамики принимает вид: ![]()
Принцип Даламбера. При движении материальной точки активные силы и силы реакции связей вместе с силой инерции точки образуют равновесную систему сил.
Принцип Даламбера называют еще методом кинетостатики. Задачи динамики с помощью этого метода сводятся к задачам статики.
Лекция 4
Краткое содержание: Динамика несвободной материальной точки. Относительное движение материальной точки. Частные случаи.
Динамика несвободной материальной точки
Несвободной материальной точкой называется точка, свобода движения которой ограничена.
Тела, ограничивающие свободу движения точки, называются связями.
Пусть связь представляет собой поверхность какого-либо тела, по которой движется точка. Тогда координаты точки должны удовлетворять уравнению этой поверхности, которое называется уравнением связи.
![]()
Если точка вынуждена двигаться по некоторой линии, то уравнениями связи являются уравнения этой лини.
![]() ,
, ![]()
Таким образом, движение несвободной материальной точки зависит не только от приложенных к ней активных сил и начальных условий, но так же от имеющихся связей. При этом значения начальных параметров должны удовлетворять уравнениям связей.
Связи бывают двухсторонние или удерживающие и односторонние или неудерживающие.
Связь называется двухсторонней если, накладываемые ею на координаты точки ограничения выражаются в форме равенств, определяющих кривые или поверхности в пространстве на которых должна находится точка.
Пример
Материальная точка
подвешена на стержне длины
![]() .
.
Уравнение связи имеет вид:
![]()
Связь называется односторонней если, накладываемые ею на координаты точки ограничения выражаются в форме неравенств. Односторонняя связь препятствует перемещению точки лишь в одном направлении и допускает ее перемещение в других направлениях.
П ример
ример
Материальная точка подвешена на нити длины .
Уравнение связи имеет вид:
![]()
Принцип освобождаемости от связей
Связь можно отбросить заменив действие связи силой реакции связи.
![]() .
.
В проекциях на оси декартовой системы координат это будет выглядеть так:
![]() ,
,
![]() ,
,
![]() .
.
Относительное движение материальной точки
Во многих задачах динамики движение материальной точки рассматривается относительно системы отсчета, движущейся относительно инерциальной системы отсчета.
П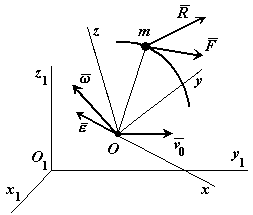 олучим
дифференциальные уравнения движения
материальной точки относительно
подвижной системы отсчета.
олучим
дифференциальные уравнения движения
материальной точки относительно
подвижной системы отсчета.
![]() -
инерциальная система отсчета.
-
инерциальная система отсчета.
![]() -
подвижная система отсчета.
-
подвижная система отсчета.
![]() ,
,
где
- сумма активных сил,
![]() - сумма сил реакции связи.
- сумма сил реакции связи.
Согласно теореме Кориолиса
Перепишем дифференциальное уравнение следующим образом
![]()
Введем обозначения
![]() - переносная сила
инерции,
- переносная сила
инерции,
![]() - кориолисова
сила инерции.
- кориолисова
сила инерции.
С учетом этих обозначений мы получаем динамическую теорему Кориолиса (уравнения относительного движения).
Материальная точка движется относительно неинерциальной системы отсчета так же как и относительно инерциальной, только к приложенным активным силам и силам реакции связей следует добавить кориолисову и переносную силу инерции.
![]()
Силы
![]() и
и
![]() являются поправками на неинерционность
системы.
являются поправками на неинерционность
системы.
В проекциях на подвижные оси
![]()
![]()
![]()
Частные случаи относительного движения
1. Относительное движение по инерции
Если материальная точка движется относительно подвижной системы отсчета прямолинейно и равномерно, то такое движение называется относительным движением по инерции.
![]() ,
,
![]() ,
следовательно
,
следовательно
![]()
2. Относительное равновесие
При покое материальной точки относительно подвижной системы отсчета ее относительные скорость и ускорение равны нулю, т.е.
![]() и
,
следовательно ускорение Кориолиса
тоже равно нулю
и
,
следовательно ускорение Кориолиса
тоже равно нулю
![]()
Условие относительного равновесия имеет вид:
![]()
3. Инерциальные системы отсчета
Переносное ускорение в общем случае вычисляется по формуле
![]() ,
,
где
![]() - ускорение точки, принятой за полюс
(начало координат);
- ускорение точки, принятой за полюс
(начало координат);
![]() - угловая
скорость вращения подвижной системы
координат вокруг выбранного полюса;
- угловая
скорость вращения подвижной системы
координат вокруг выбранного полюса;
![]() - угловое
ускорение этого вращения (
- угловое
ускорение этого вращения (![]() );
);
![]() - радиус-вектор движения точки
относительно полюса.
- радиус-вектор движения точки
относительно полюса.
Если подвижная система отсчета движется поступательно, прямолинейно и равномерно, то
![]() ,
, ![]()
и уравнения относительного движения имеют вид:
![]() .
.
Подвижная система отсчета тоже инерциальна.
Пример 1
Лифт движется
вверх с ускорением
![]()
Пример 2
Лекция 5
Краткое содержание: Внутренние и внешние силы. Центр масс. Моменты инерции относительно точки и осей. Теорема Штейнера.
Введение в динамику системы
Механической системой называется любая система материальных точек и тел.
Внешними силами механической системы называются силы, с которыми на точки и тела механической системы действуют точки и тела не входящие в рассматриваемую систему.
Равнодействующая
всех внешних сил приложенных к
![]() точке
обозначается
точке
обозначается
![]() (от латинского exterior -
внешний).
(от латинского exterior -
внешний).
Внутренними силами механической системы называются силы взаимодействия между точками и телами рассматриваемой системы.
Равнодействующая
всех внутренних сил приложенных к
точке
обозначается
![]() (от латинского interior -
внутренний).
(от латинского interior -
внутренний).
Это разделение является условным и зависит от того, какая механическая система рассматривается.
Внутренние силы системы обладают следующими свойствами:
Теорема.
Главный вектор всех внутренних сил
системы (векторная сумма) равен нулю
при любом состоянии системы.
![]() .
.
Доказательство: Согласно одной из аксиом динамики, любые две точки системы действуют друг на друга с равными по величине, но противоположно направленными силами. Векторная сумма этих сил равна нулю. Все внутренние силы являются большим количеством таких парных сил. Поэтому сумма всех внутренних сил равна нулю.
Теорема.
Главный момент всех внутренних сил
системы (векторная сумма) относительно
любой точки или оси равен нулю при любом
состоянии системы.
![]() или
или
![]() .
.
Доказательство: Любые две точки системы действуют друг на друга с равными по величине, но противоположно направленными силами. Сумма моментов этих сил относительно любой точки или оси равна нулю. Все внутренние силы являются большим количеством таких парных сил. Поэтому сумма моментов всех внутренних сил относительно любой точки или оси равна нулю.
Дифференциальные уравнения системы в векторной форме:
![]() ,
,
![]()