Материал: Лекция 15 Пуск АД
вращения |
2 |
1 s от времени |
t |
, построенные по (2.53). Если |
|
1 |
Tм |
||
считать, что разгон совершается до |
sкон 0 , то длительность пуска |
|||
(t /Tм )S 0 |
. Принимая, что пуск практически заканчивается, когда |
|||
sкон отличается не более чем на 5% от установившегося значения, получаем
t |
1 |
|
|
|
1 |
|
1 0,052 |
|
1 |
|
|
1 |
|
||||
|
|
|
|
s ln |
|
|
|
|
|
|
|
|
1,5s |
|
|
|
|
|
2K |
|
|
2S |
|
K |
|
4s |
|||||||||
T |
|
|
m |
0,05 |
m |
|
|
m |
|
||||||||
м |
|
п |
|
|
|
|
|
|
п |
|
|
m |
|||||
Следовательно, относительная длительность пуска определяется величиной sm , которая пропорциональна сопротивлению цепиротора, и
кратностью максимальногомомента Кп .
2 / 1 |
а |
|
|
б |
Sкр3 Sкр2 |
М |
1 |
||
1 |
|
|
|
2 |
0,8 |
|
|
|
|
|
|
|
|
|
0,6 |
Sкр2 |
Sкр1 |
|
3 |
|
|
|||
0,4 |
|
Ммах |
|
|
|
Sкр1 |
|
|
|
0,2 |
|
|
|
|
0 |
|
t / Тм |
|
0 0,2 0,4 0,6 0,8 |
|
|
|
||
Рис. 2.53. Кривые разгона двигателя (a) и зависимости М=F(s) при различных значениях s кр (б)
Минимальное значение относительной длительности пуска при
заданном значении Kп можно получить из условия d t / ds 0. При
Tм
этом sm 0,407 |
и |
|
t |
|
|
1.22 |
. Минимальное время пуска соот- |
||
|
|
|
|
|
|
||||
T |
|
K |
|
||||||
|
|
|
м min |
|
|
|
п |
|
|
ветствует наибольшей площади, ограниченной кривой M f s – в
данном случае кривой 2 на рис. 2.53, б.
Потери энергии при пуске. Эти потери можно определить из следующей формулы:
tП
W Pэл2dt Pэл1dt ,
0
где W W2 W1 – потери энергии в роторе и статоре. Потери энергии в роторе за время dt
Pэл2dt Pэмsdt 1s Mдин Mс dt .
Заменяя
|
|
|
|
sM |
дин |
dt J |
d 2 |
|
sdt 2Jsds ; |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
dt |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||
sM |
|
dt M |
|
M |
|
|
s |
|
|
Tм |
|
|
|
ds 2J |
|
|
Mс* |
sds |
||||||||||||||||
с |
н |
с* |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
! |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
M* Mс* |
|
|
|
|
|
|
|
|
M* Mс* |
|||||||||||||
|
|
|
|
|
d |
2 |
|
ds; |
dt |
|
|
Tмds |
; |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
M* Mс* |
|
|
|
|
|
|||||||
получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
P |
|
|
dt 2Js |
1 |
|
|
|
|
|
Mс* |
|
|
ds . |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
эл2 |
|
|
1 |
|
|
|
|
M* M |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
||||||||||||
За весь период пуска tп |
от s 1 до sн |
потериэнергии в роторе |
||||||||||||||||||||||||||||||||
|
|
|
tП |
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
1 |
|
|
Mс |
|
|
|
|
|
||||||||
|
W2 |
|
|
|
|
|
|
|
|
|
|
|
sds |
|
|
|
|
|
|
|||||||||||||||
|
Pэл2dt J 1 |
|
|
|
|
|
|
|
|
|
sds |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M* Mс |
|
|
|||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Sн |
|
|
|
|
|
Sн |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
J 2 |
|
|
|
|
|
|
1 |
|
|
|
M |
с |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
1 sн2 2 |
|
|
|
|
|
|
|
|
sds . |
|
(2.54) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Sн |
|
M* Mс |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Первый член выражения (2.54) определяет потери энергии, обусловленные действием приложенного к валу двигателя динамического момента, а второй – статического. Для вычисления последнего члена
необходимо знать характер изменения моментов M* и MC* , т.е. ме-
ханические характеристики двигателя и приводимого им производственного механизма.
Потери энергии в обмотке статора при пуске
tп |
|
|
tп I |
2 R |
|
|
|
|
|
||||||
W1 m1I12R1dt |
|
1 |
|
|
1 |
m1I22R2dt . |
|
|
|||||||
I2 |
R2 |
|
|
||||||||||||
0 |
|
|
0 |
|
|
|
|
|
|
|
|
||||
Принимая приближенно, что за период пуска сопротивления R1 |
|||||||||||||||
и R2 не изменяются, а отношение |
|
|
I1 |
|
1/0,9 , получаем |
|
|
||||||||
|
I2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
W 1,112 |
R tп |
m I 2R dt 1,112 |
R |
|
|
||||||||||
1 |
0 |
1 |
W . |
(2.55) |
|||||||||||
|
|
||||||||||||||
1 |
R2 |
|
1 |
2 |
|
|
2 |
|
|
R2 |
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
В глубокопазных двигателях при определении сопротивления обмотки ротора R2 необходимо учитывать его увеличение из-за вы-
теснения тока в стержнях припуске. Увеличение R2 приводит к
уменьшению пускового тока и в соответствии с (2.55) уменьшению потерь в обмотках.
При прямом пуске двигателя без нагрузки от номинального или пониженного напряжения почти весь вращающий момент идет на увеличение частоты вращения. При неизменной массе вращающихся частей в каждый данный момент времени ускорение ротора примерно пропорционально развиваемому им вращающему моменту, если пренебречь влиянием механических потерь.
При малом времени пуска оно может быть увеличено посредством сопряжения с другой машиной. Кроме того, увеличение маховых масс уменьшает содержание высших гармонических в кривой момента, вызванных возможными колебаниями частоты вращения и ускорения.
При исследовании механической характеристики ускорение можно измерять путем измерения частоты вращения при дальнейшем

её дифференцировании. Измерение частоты вращения производится посредством тахогенератора, жестко сочлененного с испытуемым асинхронным двигателем. Для быстропротекающих процессов запись следует вести осциллографом.
Для определения ускорения dn2 нужно графически продиффе- dt
ренцировать кривую n2 f t . Данный способ неточен и трудоемок.
Измерение частоты вращения цифровым тахометром дает более высокую точность по сравнению с тахогенератором, а если цифровой тахометр использовать в режиме счетчика импульсов, то с помощью
компьютера можно получить зависимость M f s . Например, если
подсчитывать количество импульсов через каждые 0,01 секунды при пуске двигателя, то таким образом можно вычислять ускорение через 0,01 секунды, а, следовательно, и момент.
Рабочие характеристики АД. При изменении нагрузки двига-
теля происходит изменение как потребляемых из сети тока I1 и мощ-
ности P1 , так и угловой скорости (или скольжения s ), КПД и cos .
Нагрузкой для двигателя служит нагрузочный момент M2 , при-
ложенный к его валу. При увеличении нагрузочного момента соответственно увеличивается электромагнитный момент, создаваемый двигателем:
Mэм M2 |
M0 Cм I2 cos 2 , |
где М0 – момент, обусловленный механическими и добавочными потерями.
Момент М0 слабо зависит от нагрузки. Он относительно мал и можно принять, что M M2 . От момента М2 зависит полезная мощность P2 , снимаемая с вала двигателя
P2 M2 2 .
Зависимости 2,M2, I1,cos 1, ,P1 f P2 называются рабо-
чими характеристиками двигателя. Примерный их вид показан на рис. 2.57.
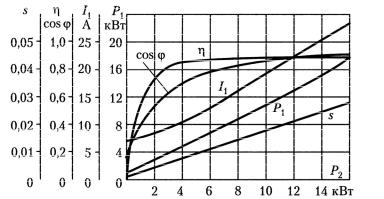
Рис. 2.57. Рабочие характеристики асинхронного двигателя
Пр и холостом ходе, когда P2 0 и M2 0, ток I1 будет равен току хо-
лостого хода I0 . Как и у трансформатора, этот ток является в основ-
ном намагничивающим и создает основное магнитное поле. Однако из–за наличия воздушного зазора между статором и ротором относительное значение его больше, чем у трансформатора, и составляет 25– 50% номинального тока статора.
Мощность P1, потребляемая двигателем из сети при холостом ходе, расходуется на потери внутри машины: механические потери pмех , магнитные потери в статоре pст , электрические потери в об-
мотке статора от тока I0 .
При увеличении момента M ток ротора I2 должен увеличи-
ваться. Возрастание тока I2 происходит за счет увеличения индуци-
руемой в обмотке ротора ЭДС E2S E2s вследствие снижения угло-
вой скорости 2 (увеличение s ). Поэтому зависи-
мость 2 f P2 имеет падающий характер. Однако у большинства асинхронных двигателей изменение частоты вращения при нагрузке незначительно, и характеристика 2 f P2 является достаточно жесткой.
Скольжение s с ростом P2 будет возрастать. При холостом ходе из–за наличия механических потерь (момент M0 ) ток I2 0, следо-