Материал: Лекция 15 Пуск АД

начальный линейный пусковой ток был бы равен Iп |
3U1н |
. Таким |
|
zk |
|||
|
|
образом, применением переключения со звезды на треугольник удается снизить начальный пусковой ток в 3 раза:
Iп |
3 , |
(2.49) |
|
IпY |
|||
|
|
при этом начальный пусковой момент снижается пропорционально квадрату отношения фазных напряжений, т.е. также в 3 раза. Этот способ пуска иногда применяется при пуске низковольтных двигателей большой мощности.
Вычисленные по (2.47) – (2.49) уменьшения пусковых токов и моментов получены в предположении, что zk const . В действитель-
ности с ростом тока из–за насыщения стали зубцов от потоков рассеяния индуктивные сопротивления рассеяния статора и ротора уменьшаются и zk const . С учетом этого изменение тока при снижении
напряжения будет происходить несколько сильнее.
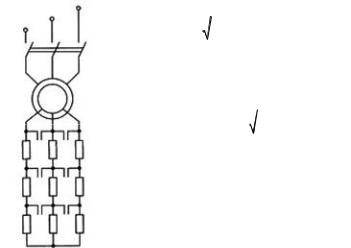
Пуск асинхронных двигателей с фазным ротором. При пуске двигателя с фазным ротором в цепь ротора включается добавочное активное сопротивление Rп – пусковой реостат (рис. 2.51). Пусковой
реостат обычно имеет несколько ступеней и рассчитывается на кратковременное протекание тока.
Как показано ранее, при включении активного сопротивления в цепь ротора уменьшается начальный пусковой ток Iп и увеличивается начальный пусковой момент Mп . С физической точки зрения уве-
личение начального пускового момента при введении активного сопротивления в цепь ротора объясняется тем, что в этом случае, несмотря на снижение тока ротора I2 , его активная составляющая
I2 cos 2 и пропорциональный ей вращающий момент увеличиваются вследствие уменьшения угла 2 . Наибольший начальный пусковой момент может быть получен равным максимальному моменту двигателя: Mп =Mm . Сопротивление пускового реостата, соответствующее
Mп =Mm , определяют, приравняв критическое скольжение sm 1, т.е.
|
|
|
s |
|
c1 r2 Rп.кр |
=1, |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
m |
|
r12 x1 c1x2 2 |
|
|
|
|
||||||||
|
|
К |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
откуда приведенное к числу витков обмотки |
||||||||||||||
|
|
|
статора сопротивление пускового реостата |
||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
. |
||||
|
|
|
R |
|
|
|
|
r2 |
|
x c x |
2 |
||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
п.кр |
|
|
|
1 |
|
1 |
1 |
2 |
|
|
||||
К1 |
К1 |
Rдоб1 |
|
|
|
с1 |
|
|
|
|
|
|
|
|
|||
Действительное сопротивление пусково- |
|||||||||||||||||
|
|
|
|||||||||||||||
К2 |
К2 |
Rдоб2 |
го реостата |
|
|
|
|
|
|
|
w k |
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
об2 |
||||||
К3 |
К3 |
Rдоб3 |
|
R |
|
|
R |
|
2 |
. |
|||||||
|
|
|
w k |
|
|||||||||||||
|
п.кр |
|
|
п.кр |
|
об1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||
Обычно выбирают Rп Rп.кр .
По мере разгона двигателя сопротивление пускового реостата уменьшают, переходя с одной его ступени на другую. Этот переход
может осуществляться как вручную, так и автоматически путем закорачивания части сопротивления с помощью контакторов. Ступени пускового сопротивления рассчитываются так, чтобы при переключениях вращающий момент двигателя менялся в выбранных пределах от
Мп mах до Мпmin .
Динамика пуска. Динамические свойства электропривода с асинхронным электродвигателем определяются уравнением
M Mс Mдин, |
(2.50) |
где Мдин – динамический момент системы асинхронный двигатель –
производственный механизм.
Выражая момент инерции через маховой момент
J |
GD2 |
, (кГМ2 ) |
|
4g |
|||
|
|

где g – ускорение силы тяжести, равное 9.81 м/с2 , и выражая частоту вращения 2 2 n/60 , получаем
Мдин GD2 /375 dn . dt
Время разгона электродвигателя определяется главным образом электромеханическими процессами, так как электромагнитные переходные процессы, происходящие в двигателе, протекают значительно быстрее, чем электромеханические. Обычно о быстродействии двигателя судят по значению его электромеханической постоянной времени Tм , которая примерно на порядок выше электромагнитной постоянной
времени T |
|
L |
, обусловленной индуктивностью двигателя. |
|||||||||||||||||||||
|
||||||||||||||||||||||||
эм |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗначениеTì |
определяется из условий разгона двигателя при ста- |
|||||||||||||||||||||||
тическом моменте на валу MC 0. При этом уравнение (2.50) прини- |
||||||||||||||||||||||||
мает вид |
|
|
|
|
|
|
|
|
|
|
|
Jd 2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Мдин |
. |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
Выражая динамический момент в относительных единицах (в |
||||||||||||||||||||||||
долях от |
номинального |
момента |
|
двигателя) |
и |
учитывая, что |
||||||||||||||||||
2 1 1 s , d 2 /ds 1, получаем |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
J |
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Мдин |
|
|
|
|
|
|
J ds |
|
|
ds |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||||||||||||
M |
дин* |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
T |
|
|
, |
||||
Мн |
|
Mн |
|
Mн dt |
|
|||||||||||||||||||
|
|
|
|
|
|
|
м |
|
dt |
|||||||||||||||
где Tм – электромеханическая постоянная времени, определяющая динамические свойства двигателя,
Tм J 1 .
Mн
Для определения уравнения движения ротора в общем случае выразим из (2.50) динамический момент
Mдин* М* Мс*,
где |
M* |
M |
, Мс* |
Мс |
– значения указанных моментов в относи- |
||||
Mн |
Мн |
||||||||
|
|
|
|
|
|
|
|||
тельных единицах. Тогда |
|
|
|
|
|||||
|
|
|
|
|
dt |
Tм |
. |
(2.51) |
|
|
|
|
|
|
M* Mс* |
||||
|
|
|
|
|
|
|
|
||
Значения M* и Mс*определяются из механической характери-
стики двигателя и характеристики производственного механизма. Для многих электроприводов статический момент изменяется по закону
Mс |
Mп |
|
, |
|
||
|
|
|
|
|||
|
|
a bs |
||||
где a и b – постоянные. При s 1 |
|
|
|
|
||
Mс |
Mп |
|
Mп |
, |
||
a b |
|
|||||
|
|
Кр |
||||
где Кр – коэффициент резерва, необходимый для обеспечения разгона
двигателя в начале пуска.
Длительность пус- |
|
Mст |
M |
|
||||
|
|
|
||||||
ка можно определить из |
|
|
|
|||||
(2.51) |
|
|
|
|
Mном |
|
Mп |
|
|
|
|
|
|
|
|
|
|
1 |
|
ds |
|
2 |
|
|
||
tп Tм |
|
tп1 |
|
J /(М Мст ) |
||||
M* Mс* |
|
|
|
|
||||
SH |
|
|
|
|
|
Jd 2/(М Мст ) |
||
где |
|
|
|
|
|
2 |
tп |
|
|
|
|
|
ном |
|
2 |
||
1 |
|
ds |
|
|
d 2 |
|||
tп1 Tм |
|
– |
|
|
||||
|
M* Mс* |
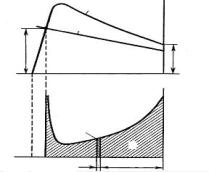
Рис. 2.52. Графическое определение времени |
||||||
Sm |
|
|
пуска двигателя с короткозамкнутым ротором |
|||||

длительность пуска |
в |
зоне |
изменения s от 1 до |
sm ; |
||||||
|
|
2H |
ds |
|
|
|
|
|
|
|
tп2 |
Tм |
|
– длительность пуска в зоне изменения |
s от |
||||||
M* Mс* |
||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
sm до sн . |
|
|
|
|
|
|
|
|||
|
Учтя Tм и переходя к интегрированию по d 2 , получим |
|
||||||||
|
|
|
|
|
|
2H |
Jd 2 |
|
||
|
|
|
|
tп |
|
|
|
|
|
|
|
|
|
|
M* Mс* |
|
|||||
|
|
|
|
|
|
0 |
|
|
|
|
Время разгона пропорционально заштрихованной площади (рис. 2.52) на графике кривой
J .
M Mс
Это время обычно невелико и не превышает нескольких секунд. Однако в двигателях с короткозамкнутым ротором при недостаточно большом электромагнитном моменте (т.е. разности M Mc ) и значи-
тельном моменте инерции процесс пуска может сильно затянуться и температура обмоток ротора и статора из-за больших пусковых токов может превысить допустимые пределы.
Рассмотрим уравнение движения ротора при пуске электродвигателя без нагрузки ( Mc 0), предположив, что механическая харак-
теристика двигателя определяется формулой Клосса (2.38). В этом случае (2.51) принимает вид
|
T ds |
|
T M |
н |
s |
/s s/s |
|
T |
s |
|
s |
|
||
dt |
м |
|
м |
m |
m |
|
ds |
м |
|
|
|
m |
ds. (2.52) |
|
M /Mн |
|
|
2Mm |
|
|
|
s |
|||||||
|
|
|
|
|
|
2Kп sm |
|
|
||||||
Решение данного дифференциального уравнения получим, проинтегрировав (2.52) в пределах от s 1 до некоторого конечного значения: sкон
t |
1 |
|
|
|
|
1 |
|
1 s |
2 |
|
|
|
|
|
|
|
s |
m |
ln |
|
|
|
кон |
. |
(2.53) |
|
2K |
|
|
2s |
|
|||||||
T |
|
|
|
s |
|
|
|
|||||
м |
|
п |
|
|
кон |
m |
|
|
||||
На рис. 2.53, а приведены зависимости относительной частоты