Материал: Исследование нелинейных систем методами Ляпунова
Здесь матрицы ![]() и
и ![]() из
уравнения Ляпунова (20).
из
уравнения Ляпунова (20).
Если удается показать, что модуль
первого слагаемого в (22) в некоторой области, включающей точку ![]() пространства
состояний системы (см. рис. 5, не заштрихованная область), больше модуля
второго слагаемого, то в этой области, очевидно, будут выполнены условия
теоремы 1, и, следовательно, при всех начальных условиях из этой области
свободное движение исследуемой системы будет затухающим.
пространства
состояний системы (см. рис. 5, не заштрихованная область), больше модуля
второго слагаемого, то в этой области, очевидно, будут выполнены условия
теоремы 1, и, следовательно, при всех начальных условиях из этой области
свободное движение исследуемой системы будет затухающим.
В этом случае положение равновесия ![]() нелинейной
системы (21) будет асимптотически устойчивым в большом. Указанная область (рис.
5) будет областью устойчивости или областью притяжения положения равновесия
нелинейной
системы (21) будет асимптотически устойчивым в большом. Указанная область (рис.
5) будет областью устойчивости или областью притяжения положения равновесия ![]() рассматриваемой
нелинейной системы (21).
рассматриваемой
нелинейной системы (21).
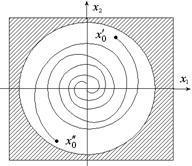
Рис. 5
Пример 5. Исследовать устойчивость
положения равновесия системы, показанной на рис. 6, двумя (первым и вторым)
методами Ляпунова, если ![]() , а y -
отклонение выходной переменной.
, а y -
отклонение выходной переменной.
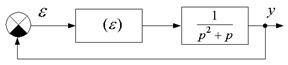
Рис. 6
Решение. Прежде всего, найдем
уравнения заданной системы в переменных состояния. В соответствии с рис. 6
имеем равенства, ![]() ,
, ![]() . Переходя к
оригиналам, получим
. Переходя к
оригиналам, получим ![]() . Отсюда
. Отсюда ![]() , так как
, так как ![]() .
.
Пусть ![]() , тогда
, тогда ![]() .
Следовательно, уравнения рассматриваемой системы в форме (4) имеют вид
.
Следовательно, уравнения рассматриваемой системы в форме (4) имеют вид
![]()
![]() (23)
(23)
Первый метод Ляпунова. Здесь
необходимо сначала построить уравнения первого приближения. По формулам (8)
находим:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Итак, уравнение первого приближения (7) заданной системы
(23) имеет вид
![]()
Характеристический полином этой
системы
![]()
а его корни ![]() ,
, ![]() . Так как
один из корней равен нулю, то сделать какое-либо заключение об устойчивости или
неустойчивости системы (23) по уравнениям первого приближения нельзя.
. Так как
один из корней равен нулю, то сделать какое-либо заключение об устойчивости или
неустойчивости системы (23) по уравнениям первого приближения нельзя.
Второй метод Ляпунова. В качестве
функции Ляпунова возьмем функцию ![]() . Ее производная по времени вдоль
траекторий системы (23) определяется следующим образом:
. Ее производная по времени вдоль
траекторий системы (23) определяется следующим образом:
Очевидно, функции ![]() и
и ![]() не
удовлетворяют ни первой, ни второй теоремам Ляпунова, а удовлетворяют теореме
Барбашина-Красовского. При этом функция
не
удовлетворяют ни первой, ни второй теоремам Ляпунова, а удовлетворяют теореме
Барбашина-Красовского. При этом функция ![]() обращается в нуль при
обращается в нуль при ![]() и любом
и любом ![]() . Подставим
эти значения в уравнения системы (23). В результате получим систему
. Подставим
эти значения в уравнения системы (23). В результате получим систему
![]() ,
,
![]() ,
,
траектории которой не принадлежат
множеству ![]() ,
, ![]() .
.
Следовательно, в силу теоремы Барбашина-Красовского положение равновесия исследуемой нелинейной системы асимптотически устойчиво в целом.
Часто нелинейная система имеет
устойчивую линейную часть и одну нелинейность ![]() , где
, где ![]() , причем
, причем
![]() и
и ![]() . (24)
. (24)
В этих случаях в качестве кандидата
в функции Ляпунова можно брать сумму
![]() (25)
(25)
Пример 6. Рассмотрим нелинейную
систему
![]()
![]()
Функция ![]() расположена
в первом и третьем квадрантах, как показано на рис. 7. Исследовать устойчивость
положения равновесия
расположена
в первом и третьем квадрантах, как показано на рис. 7. Исследовать устойчивость
положения равновесия ![]() данной
системы.
данной
системы.
Рис. 7
![]()
Итак, в силу первой теоремы Ляпунова данная система имеет асимптотически устойчивое в целом положение равновесия. ■
Градиентное управление. С помощью
функции Ляпунова ![]() в виде
квадратичной формы (13), построенной для устойчивой линейной части нелинейной
системы типа (21), можно синтезировать так называемое градиентное управление.
Это управление обеспечивает асимптотическую устойчивость в целом положения
равновесия при наличии аддитивной с управлением ограниченной нелинейности.
Покажем процедуру построения такого управления на примере.
в виде
квадратичной формы (13), построенной для устойчивой линейной части нелинейной
системы типа (21), можно синтезировать так называемое градиентное управление.
Это управление обеспечивает асимптотическую устойчивость в целом положения
равновесия при наличии аддитивной с управлением ограниченной нелинейности.
Покажем процедуру построения такого управления на примере.
Пример 7. Допустим, синтезируемая
нелинейная система описывается уравнением
![]() , (26)
, (26)
где А - устойчивая матрица, ![]() - скалярная
нелинейность такая, что
- скалярная
нелинейность такая, что
![]() ,
, ![]() , (27)
, (27)
причем, если ![]() , то
положение равновесия системы (26) - неустойчиво;
, то
положение равновесия системы (26) - неустойчиво; ![]() - управление. Вектор x -
измеряется.
- управление. Вектор x -
измеряется.
Необходимо найти управление ![]() , при
котором замкнутая система асимптотически устойчива в целом.
, при
котором замкнутая система асимптотически устойчива в целом.
Решение. Пусть матрица ![]() является
решением уравнения (20) при А из (26) и некоторой
является
решением уравнения (20) при А из (26) и некоторой ![]() . Положим
. Положим
 , (28)
, (28)
где ![]() - подлежащая определению функция.
- подлежащая определению функция.
Так как произведение ![]() является
градиентом функции
является
градиентом функции ![]() , то
управление (28) называется градиентным.
, то
управление (28) называется градиентным.
Найдем условие выбора функции ![]() ,
определяющей интенсивность градиентного управления (28), при котором замкнутая
система (26), (28) является асимптотически устойчивой в целом.
,
определяющей интенсивность градиентного управления (28), при котором замкнутая
система (26), (28) является асимптотически устойчивой в целом.
С этой целью найдем производную ![]() в силу
указанной системы. На основе приведённых выше соотношений находим
в силу
указанной системы. На основе приведённых выше соотношений находим
![]() .
.
С учетом того, что матрица Р
является решением уравнения Ляпунова (20), а матрица А - устойчивой, отсюда
следует равенство
![]() , (29)
, (29)
где матрица ![]() .
.
Рассмотрим два случая.
. Пусть ![]() . Тогда в
силу (28)
. Тогда в
силу (28) ![]() , и из (29)
вытекает соотношение
, и из (29)
вытекает соотношение
![]() .
.
2. Пусть теперь ![]() . Тогда,
подставляя
. Тогда,
подставляя ![]() из (28) в
(29), получим
из (28) в
(29), получим
 . (30)
. (30)
Произведение ![]() можно
представить в виде
можно
представить в виде
![]() .
.
Поэтому из равенства (30) выводим
![]() . (31)
. (31)
Из условия (27) на нелинейность ![]() следует,
что значение разности в квадратных скобках соотношения (31) является строго
положительным, если функция
следует,
что значение разности в квадратных скобках соотношения (31) является строго
положительным, если функция ![]() удовлетворяет условию
удовлетворяет условию
![]() , (32)
, (32)
где ![]() - положительно-определенная
функция.
- положительно-определенная
функция.
Таким образом, при условии (32)
положительно-определенная функция ![]() имеет отрицательно-определенную
производную по времени
имеет отрицательно-определенную
производную по времени ![]() вдоль
траекторий системы (33), (35) во всей области изменения вектора состояния
вдоль
траекторий системы (33), (35) во всей области изменения вектора состояния ![]() .
Следовательно, синтезированная система с градиентным управлением (28), (32)
является асимптотически устойчивой в целом.
.
Следовательно, синтезированная система с градиентным управлением (28), (32)
является асимптотически устойчивой в целом.
Условие ![]() может
выполняться лишь на некоторой гиперповерхности, в которой не могут лежать целые
траектории системы (26), (28) (кроме начинающихся в точке
может
выполняться лишь на некоторой гиперповерхности, в которой не могут лежать целые
траектории системы (26), (28) (кроме начинающихся в точке ![]() ). Поэтому
из выражений (30) и (32) следует, что почти во всех точках траекторий
рассматриваемой системы выполняется условие
). Поэтому
из выражений (30) и (32) следует, что почти во всех точках траекторий
рассматриваемой системы выполняется условие
![]() ,
, ![]() .
.
На основе этого неравенства можно
заключить, что путем изменения положительно-определенной функции ![]() можно
изменять скорость затухания функции Ляпунова, а, следовательно, и скорость
затухания нормы решения
можно
изменять скорость затухания функции Ляпунова, а, следовательно, и скорость
затухания нормы решения ![]() нелинейной
системы с градиентным управлением.
нелинейной
системы с градиентным управлением.
Рассмотрим еще один пример применения функций Ляпунова в виде квадратичной формы для обоснования устойчивости положения равновесия нелинейной системы. При синтезе системы управления здесь используется квазилинейное представление модели нелинейной системы, а также полиномиальный подход, изложенный применительно к линейным системам в восьмой главе.
Квазилинейная модель. Рассмотрим нелинейную
управляемую систему, которая описывается уравнением
![]() , (33)
, (33)
где ![]() - доступный измерению вектор
состояния системы;
- доступный измерению вектор
состояния системы; ![]() -
непрерывная вектор-функция, причем
-
непрерывная вектор-функция, причем
![]() ,
, ![]() , (34)
, (34)
при ![]() . Здесь
. Здесь ![]() - некоторая
область простран-
- некоторая
область простран-
ства ![]() . В этих условиях уравнение (33)
допускает квазилинейное [2] представление
. В этих условиях уравнение (33)
допускает квазилинейное [2] представление
![]() , (35)
, (35)
где ![]() и
и ![]() - функциональные n-вектор и
непрерывная
- функциональные n-вектор и
непрерывная ![]() -матрица,
элементы которых определяются [2] выражениями:
-матрица,
элементы которых определяются [2] выражениями:
![]() ,
, ![]() ,
,
где ![]() ,
, ![]() - символ транспонирования.
- символ транспонирования.
Управление ищется в виде ![]() , где
, где ![]() . Поэтому с
учетом (35) уравнение системы (33) принимает вид
. Поэтому с
учетом (35) уравнение системы (33) принимает вид
![]() , (36)
, (36)
![]() . (37)
. (37)
Обозначим ![]() - решение
системы (33), (35) или (36). При этом
- решение
системы (33), (35) или (36). При этом ![]() ,
, ![]() , а область
, а область ![]() такова, что
при всех
такова, что
при всех ![]() и
и ![]() решение
решение ![]() .
.
Необходимо найти непрерывный вектор ![]() из (37),
при котором
из (37),
при котором
![]() , (38)
, (38)
т.е. обеспечивается асимптотическая
устойчивость положения равновесия ![]() замкнутой системы (33) или, что то
же самое, системы (36) в некоторой области
замкнутой системы (33) или, что то
же самое, системы (36) в некоторой области ![]() . Здесь
. Здесь ![]() -
положительные постоянные.
-
положительные постоянные.
Следующая теорема определяет условия
существования области притяжения положения равновесия ![]() системы
(36).
системы
(36).
Теорема 8. Если матрица ![]() является
непрерывной, а коэффициенты её характеристического полинома - постоянными
числами, и этот полином удовлетворяет критерию Гурвица, то существует некоторая
область
является
непрерывной, а коэффициенты её характеристического полинома - постоянными
числами, и этот полином удовлетворяет критерию Гурвица, то существует некоторая
область ![]() , такая, что
при всех
, такая, что
при всех ![]() и
и ![]() выполняется
неравенство (6) при
выполняется
неравенство (6) при ![]() ,
, ![]() .
.