Материал: Исследование нелинейных систем методами Ляпунова
Если положение равновесия ![]() системы
устойчиво асимптотически, то расстояние
системы
устойчиво асимптотически, то расстояние ![]() изображающей точки от начала
координат с течением времени убывает, возможно, немонотонно, как для примера
показано на рис. 4. Если же особая точка
изображающей точки от начала
координат с течением времени убывает, возможно, немонотонно, как для примера
показано на рис. 4. Если же особая точка ![]() системы не является асимптотически
устойчивой, то это расстояние не уменьшается при
системы не является асимптотически
устойчивой, то это расстояние не уменьшается при ![]() .
.
Идея второго метода Ляпунова
заключается в построении некоторой функции ![]() , зависящей от вектора состояния
исследуемой системы, положительной и монотонно убывающей с уменьшением
, зависящей от вектора состояния
исследуемой системы, положительной и монотонно убывающей с уменьшением ![]() . Если эта
функция при
. Если эта
функция при ![]() будет
стремиться к нулю, подобно расстоянию изображающей точки от положения
равновесия, то, очевидно, соответствующее положение равновесия будет
асимптотически устойчивым.
будет
стремиться к нулю, подобно расстоянию изображающей точки от положения
равновесия, то, очевидно, соответствующее положение равновесия будет
асимптотически устойчивым.
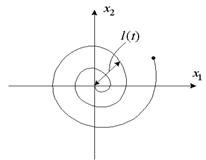
Рис. 4
Другими словами, устойчивость или
неустойчивость невозмущенного движения системы можно установить, исследовав
характер изменения функции ![]() с течением времени.
с течением времени.
Такие функции получили название функций Ляпунова. Функции Ляпунова обычно всегда больше нуля и имеют отрицательную производную по времени (в случае устойчивости положения равновесия), определенную на траекториях исследуемой системы.
В связи с этим рассмотрим понятие знакоопределенных функций, т. е. положительно (отрицательно) определенных и знакопостоянных положительно (отрицательно) полуопределенных функций, а также понятие производной по времени вдоль траекторий динамической системы.
Рассмотрим функцию ![]() . Пусть эта
функция дифференцируема, т.е. её частные производные
. Пусть эта
функция дифференцируема, т.е. её частные производные ![]() существуют
при всех
существуют
при всех ![]() .
.
Определение. Функция ![]() называется
положительно-определенной, если при любом
называется
положительно-определенной, если при любом ![]()
![]() ,
,
а при ![]()
![]() .
.
Положительно-определенная функция
обозначается ![]() .
Положительно-определенными функциями при
.
Положительно-определенными функциями при ![]() являются, например, функции
являются, например, функции
![]() ;
; ![]() .
.
Определение. Функция ![]() называется
положительно полуопределённой, если
называется
положительно полуопределённой, если
![]()
и
![]() .
.
Положительно полуопределенная
функция обозначается ![]() .
Положительно полуопределенной функцией при
.
Положительно полуопределенной функцией при ![]() является, например, функция
является, например, функция
![]() .
.
Отрицательно-определенная функция ![]() определяется
так:
определяется
так:
![]()
где
![]() .
.
Отрицательно-определенная функция
обозначается ![]() , а
отрицательно полуопределенная
, а
отрицательно полуопределенная ![]() .
.
Определение. Функция ![]() называется
бесконечно большой, если для любого числа
называется
бесконечно большой, если для любого числа ![]() найдется
найдется ![]() такое, что
вне сферы
такое, что
вне сферы ![]() имеет место
неравенство
имеет место
неравенство ![]() .
.
Квадратичные формы. Часто в качестве
знакоопределенных функций используются квадратичные формы, т. е. функции вида
![]() (13)
(13)
или
![]() .
.
Матрицы Р квадратичных форм обычно
являются симметрическими матрицами, т. е. такими, у которых
![]() . (14)
. (14)
Условия положительной определенности квадратичной формы с симметрической матрицей состоят в следующем.
Критерий Сильвестра. Для положительной
определённости квадратичной формы ![]() (13), (14) необходимо и достаточно,
чтобы все диагональные миноры матрицы Р были строго больше нуля.
(13), (14) необходимо и достаточно,
чтобы все диагональные миноры матрицы Р были строго больше нуля.
Матрицы Р, удовлетворяющие критерию
Сильвестра, называют положительно-определенными и также обозначают![]() .
.
Пусть матрица Р симметрическая, т.
е.
Для оценки знакоопределенности этой
матрицы найдем следующие определители ![]() :
:
![]() ,
, 
Тогда в соответствии с критерием
Сильвестра матрица ![]() , если
, если
![]() . (15)
. (15)
Определение производной по времени
вдоль траектории системы. Эта производная играет большую роль при исследовании
устойчивости движений динамических систем методом функций Ляпунова. Рассмотрим
некоторую функцию ![]() ,
определенную на переменных состояниях
,
определенную на переменных состояниях ![]() системы (4). Найдем её производную
по времени
системы (4). Найдем её производную
по времени ![]() вдоль
траекторий этой системы. По общему правилу дифференцирования сложной функции
находим
вдоль
траекторий этой системы. По общему правилу дифференцирования сложной функции
находим
![]() . (16)
. (16)
Однако в силу уравнения (4) ![]() . Поэтому
производная по времени от функции V(x) вдоль траектории
системы (4) определяется выражением
. Поэтому
производная по времени от функции V(x) вдоль траектории
системы (4) определяется выражением
![]() . (17)
. (17)
Пример 2. Пусть ![]() , а
уравнения системы имеют вид:
, а
уравнения системы имеют вид: ![]() . Найти производную по времени
функции
. Найти производную по времени
функции ![]() вдоль
траекторий заданной системы.
вдоль
траекторий заданной системы.
Решение. По формулам (16), (17)
находим
![]()
или с учетом заданных уравнений для ![]() и
и ![]() :
:
![]() .
.
Как видно, производная ![]() является
отрицательно-определенной. Это указывает на то, что функция
является
отрицательно-определенной. Это указывает на то, что функция ![]() монотонно
затухает, уменьшаясь по величине при
монотонно
затухает, уменьшаясь по величине при ![]() . Так как
. Так как ![]() может
уменьшаться лишь при уменьшении
может
уменьшаться лишь при уменьшении ![]() , то норма решения рассматриваемой
системы, очевидно, стремится к нулю при
, то норма решения рассматриваемой
системы, очевидно, стремится к нулю при ![]() . Причем это имеет место при любых
начальных условиях. Следовательно, положение равновесия рассматриваемой системы
является асимптотически устойчивым в целом.
. Причем это имеет место при любых
начальных условиях. Следовательно, положение равновесия рассматриваемой системы
является асимптотически устойчивым в целом.
Заметим, что этот вывод сделан без решения дифференциальных уравнений заданной нелинейной системы, и каких-либо других математических операций над ними.
Основу второго метода Ляпунова для исследования движений динамических систем составляют следующие теоремы [2, 20].
Теорема 4 (об асимптотической устойчивости). Если при
всех ![]() существует положительно-определенная
функция
существует положительно-определенная
функция ![]() такая, что
её производная по времени вдоль траекторий системы (4) является
отрицательно-определенной функцией, то положение равновесия этой системы
асимптотически устойчиво в целом.
такая, что
её производная по времени вдоль траекторий системы (4) является
отрицательно-определенной функцией, то положение равновесия этой системы
асимптотически устойчиво в целом.
Теорема 6 (Барбашина-Красовского).
Если при всех ![]() существует
бесконечно большая положительно-определенная функция
существует
бесконечно большая положительно-определенная функция ![]() такая, что
ее производная по времени вдоль траекторий системы (4) является отрицательно
полуопределенной функцией, но
такая, что
ее производная по времени вдоль траекторий системы (4) является отрицательно
полуопределенной функцией, но ![]() обращается в нуль на множестве, не
содержащем целых траекторий, (кроме положения равновесия) системы (4), то
положение равновесия системы (4) асимптотически устойчиво в целом.
обращается в нуль на множестве, не
содержащем целых траекторий, (кроме положения равновесия) системы (4), то
положение равновесия системы (4) асимптотически устойчиво в целом.
Положительно-определенная функция ![]() ,
удовлетворяющая какой-либо теореме об устойчивости или неустойчивости по
отношению к некоторой системе, называется функцией Ляпунова данной системы.
Отметим также, что если функция Ляпунова удовлетворяет условиям некоторой
теоремы об устойчивости не во всем пространстве, а лишь в некоторой области,
включающей положение равновесия, то эта область является областью притяжения соответствующего
положения равновесия.
,
удовлетворяющая какой-либо теореме об устойчивости или неустойчивости по
отношению к некоторой системе, называется функцией Ляпунова данной системы.
Отметим также, что если функция Ляпунова удовлетворяет условиям некоторой
теоремы об устойчивости не во всем пространстве, а лишь в некоторой области,
включающей положение равновесия, то эта область является областью притяжения соответствующего
положения равновесия.
Приведем примеры исследования
устойчивости движений нелинейных систем методом функций Ляпунова.
. Исследование систем методом
функций Ляпунова
Пример 3. Исследовать устойчивость
положения равновесия ![]() системы
системы
![]() ,
,
![]() .
.
Решение. Возьмем функцию ![]() . Ее
производная вдоль траекторий рассматриваемой системы, согласно (16), (17),
определяется выражением
. Ее
производная вдоль траекторий рассматриваемой системы, согласно (16), (17),
определяется выражением
![]()
Или
![]() .
.
Полученная функция является
определенно-отрицательной при всех ![]() . Следовательно, функция
. Следовательно, функция ![]() является
функцией Ляпунова для рассматриваемой системы. Причем она удовлетворяет
условиям теоремы 1 при всех
является
функцией Ляпунова для рассматриваемой системы. Причем она удовлетворяет
условиям теоремы 1 при всех ![]() ,
, ![]() . Поэтому положение равновесия
. Поэтому положение равновесия ![]() рассматриваемой
системы асимптотически устойчиво в целом.
рассматриваемой
системы асимптотически устойчиво в целом.
Пример 4. Исследовать методом
функций Ляпунова устойчивость линейной системы, уравнение свободного движения
которой имеет вид
![]() . (18)
. (18)
В данном случае можно говорить об
устойчивости системы, поскольку она всегда имеет единственное положение
равновесия, которое в отклонениях соответствует точке ![]() .
.
Решение. В данном случае функция
Ляпунова ищется обычно в виде квадратичной формы
![]() ,
,
где ![]() - симметрическая матрица.
- симметрическая матрица.
Если матрица ![]() удовлетворяет
условию (15) критерия Сильвестра, то
удовлетворяет
условию (15) критерия Сильвестра, то ![]() . Найдем ее производную по времени
на траекториях системы (18):
. Найдем ее производную по времени
на траекториях системы (18):
![]() .
.
В соответствии с выражением (16) и
уравнением (18) находим ![]() , поэтому
, поэтому
![]() , (19)
, (19)
где ![]() - симметрическая, причем
положительно-определенная матрица, т.е.
- симметрическая, причем
положительно-определенная матрица, т.е. ![]() .
.
Из выражения (19) вытекает следующее
равенство:
![]() . (20)
. (20)
Это выражение называется матричным
уравнением Ляпунова. В нём ![]() и
и ![]() - симметрические матрицы, причем
- симметрические матрицы, причем ![]() также положительно-определенная
матрица.
также положительно-определенная
матрица.
При исследовании устойчивости
линейных систем в уравнении Ляпунова обычно задаются матрицей ![]() , а матрицу
, а матрицу ![]() находят как
решение этого уравнения.
находят как
решение этого уравнения.
Ляпунов доказал следующее утверждение.
Теорема 7. Если решение уравнения
(20) - матрица ![]() является
положительно-определенной, то линейная система (18) асимптотически устойчива в
целом. Справедливо и обратное утверждение. Если же матрица Р окажется
отрицательно-определенной, то система (18) будет неустойчивой.
является
положительно-определенной, то линейная система (18) асимптотически устойчива в
целом. Справедливо и обратное утверждение. Если же матрица Р окажется
отрицательно-определенной, то система (18) будет неустойчивой.
Отметим, что математическое обеспечение современных ЦВМ имеет специальные программы для решения уравнения Ляпунова. Например, в системе MATLAB это программа "Lyap".
Уравнение Ляпунова (20) часто
применяется для исследования устойчивости и построения области притяжения (рис.
5) положения равновесия ![]() нелинейных
систем вида
нелинейных
систем вида
![]() , (21)
, (21)
где А - устойчивая матрица, ![]() - нелинейная
вектор функция, причём
- нелинейная
вектор функция, причём ![]() . Если
. Если ![]() , то ее
производная вдоль траекторий системы (21) определяется выражением
, то ее
производная вдоль траекторий системы (21) определяется выражением
![]() . (22)
. (22)