3.63. Вынужденные колебания механической системы
без учета сопротивления
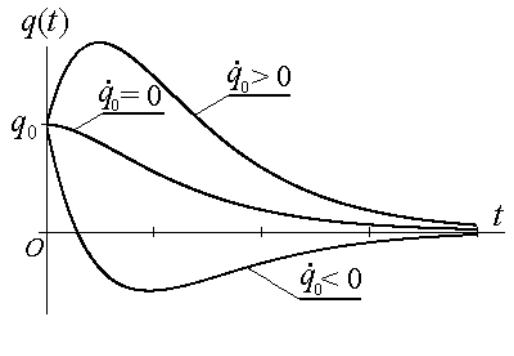
Рассмотрим движение механической системы с одной степенью свободы, около положения устойчивого равновесия, когда на точки системы, кроме потенциальных сил, начинают действовать возмущающие силы. При этом обобщенная сила Q(t), характеризующая внешнее воздействие на колебательную систему, изменяется по закону синуса или косинуса:
где Н, р и – соответственно амплитуда, частота и начальная фаза обобщенной силы.
d |
T |
− |
T |
= − |
|
+ Q(t) . |
(2) |
|
|
|
|
|
|
|
|
dt |
q |
|
q |
|
q |
|
|
T = |
1 |
aq |
2 |
; П(q) = |
1 |
сq |
2 |
. |
(3) |
|
|
2 |
|
2 |
|
|
|