Материал: ДИНАМИКА
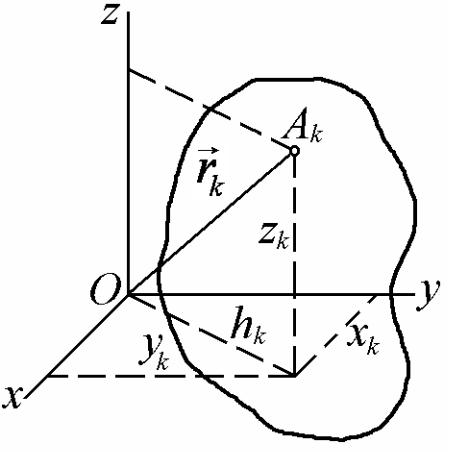
Момент инерции относительно оси координат Oz:
|
|
|
N |
|
J |
z |
= |
m h2 |
hk2 = xk2 + yk2 |
|
|
k k |
|
|
|
|
|
k =1 |
76 |
|
|
|
|
N
Jx = mk
k =1
N
J y = mk
k =1
N
Jz = mk
k =1
( yk2 + zk2 ),
(z2 |
+ x2 ), |
(4) |
k |
k |
|
(xk2 + yk2 ).
77
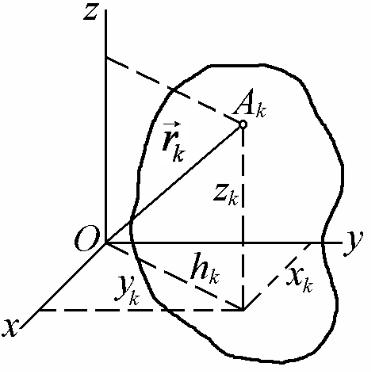
Момент инерции относительно начала координат О:
N
JO = mk rk2
k =1
rk2 = xk2 + yk2 + zk2
N |
|
JO = mk (xk2 + yk2 + zk2 ) |
(5) |
k =1 |
78 |
|
Сложив левые и правые части уравнений (4), с учётом формулы (5), получим
2JO |
= Jx +Jy |
+Jz. |
(6) |
|
|
|
Сумма осевых моментов инерции механической системы относительно трех координатных осей равна удвоенному полярному моменту инерции этой системы относительно начала координат.
79
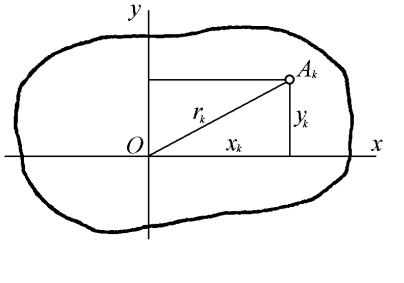
Для плоскости:
N |
|
N |
J x = mk yk2 , |
J y = mk xk2 |
|
k =1 |
|
k =1 |
N |
|
|
JO = mk (xk2 + yk2 ) |
(7) |
|
k =1
JО = Jx + Jy, |
(8) |
момент инерции плоской фигуры относительно начала координат равен сумме моментов инерции этой фигуры относительно двух координатных осей, лежащих в
плоскости этой фигуры. |
80 |