Материал: ДИНАМИКА
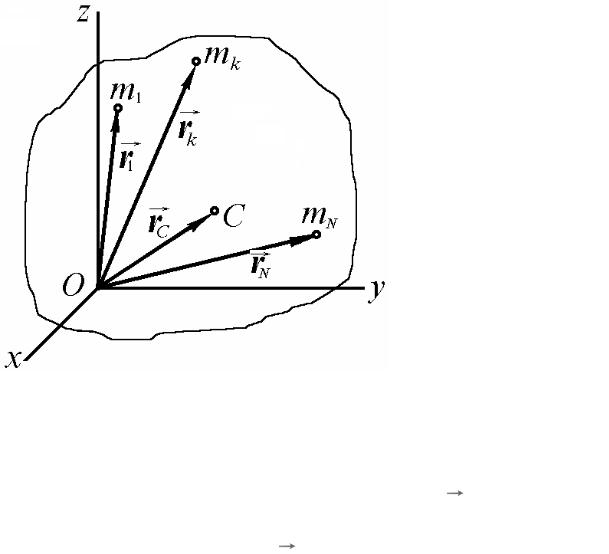
Центром масс механической системы - геометрическая точка C, положение которой определяется радиус-вектором:
|
|
N |
|
|
|
mk rk |
|
rC |
= |
k =1 |
(2) |
N |
|||
|
|
mk |
|
k =1
66

Координаты центра масс системы
|
N |
|
N |
|
N |
|
|
mk xk |
|
mk yk |
|
mk zk |
|
x = |
k =1 |
; y = |
k =1 |
; z = |
k =1 |
|
N |
N |
N |
||||
C |
C |
C |
||||
|
mk |
|
mk |
|
mk |
|
|
k =1 |
|
k =1 |
|
k =1 |
Статический момент массы системы:
N |
= MrC |
; |
|
mk rk |
(3) |
||
|
|
|
k =1
67
N
mk xk
k =1
N
mk yk
k =1
N
mk zk
k =1
=MxC ;
=MyC ;
=MzC .
Центр масс системы – это такая точка, относительно которой статический момент массы равен нулю.
68

3.10. Классификация сил, действующих на систему. Дифференциальные уравнения
движения системы
Внешние силы - силы взаимодействия между точками системы и точками, не принадлежащими к этой системе.
Внутренне силы - силы взаимодействия между точками системы.
Fk(e) - равнодействующая внешних сил
Fk( i ) - равнодействующая внутренних сил
69
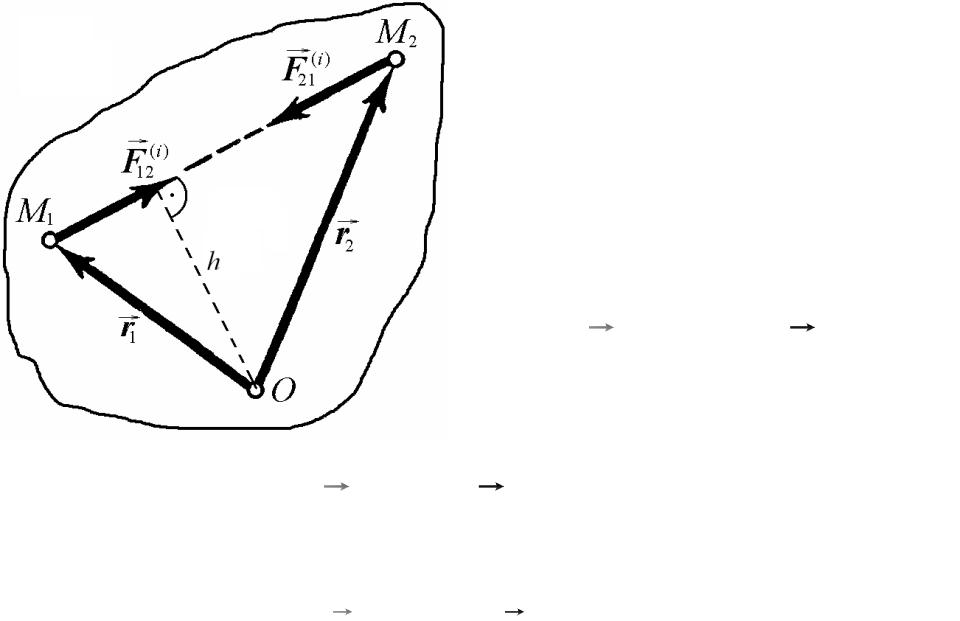
Главный |
вектор |
всех |
внутренних |
|
сил |
механической системы равен нулю.
F12(i ) = −F21(i )
|
(i ) |
(i ) |
= 0 |
|
F12 |
+ F21 |
(1) |
||
|
|
|
|
|
R |
|
N |
= 0 |
|
|
= Fk |
|
||
|
(i) |
(i) |
|
(2) |
|
|
|
|
|
k =1 |
70 |
|