Материал: Д5328П Стегаличев Ю. Г. и др. Рабочая программа дисциплины т
Задача 2.2
На рис. 14 приведена структурная схема контура регулирования объекта, реализующая пропорциональный (П) закон регулирования. В схеме используется релейное звено и исполнительный механизм постоянной скорости.
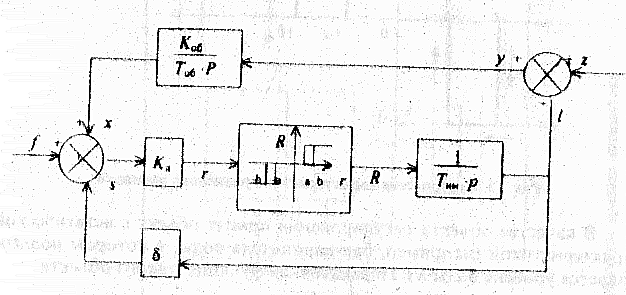
Рис. 14. Структурная схема контура регулирования объекта, реализующая П-закон:
f – параметр, определяющий величину задания регулируемого параметра (x0 = f); x – регулируемый параметр (например, уровень воды в баке); z – параметр, определяющий величину неуправляемого возмущающего воздействия на объект (например, расход воды, потребляемой из бака); l – перемещение регулирующего органа (исполнительного механизма), определяющее величину регулирующего воздействия на объект (например, расход доливаемой воды в бак); y = z l – суммарное возмущающее воздействие на объект; m = l – параметр, определяющий величину сигнала, формируемого функциональной обратной связью ( = 1/Кр – диапазон пропорциональности регулятора, Кр – коэффициент передачи регулятора); s = x f m параметр, определяющий величину сигнала рассогласования (сигнала ошибки); r = Кл s – параметр, определяющий величину сигнала, управляющего релейным звеном регулятора (Кл – коэффициент усиления линейного звена регулятора); R – параметр, определяющий сигнал на выходе релейного звена, может принимать значения R = +1; R = 1; R = 0.
Релейное звено, используемое в схеме, реализует статическую характеристику, представленную на рис. 15. Включение реле происходит при значениях R = +b и R = b, отключение – при значениях R= +a, R = a.
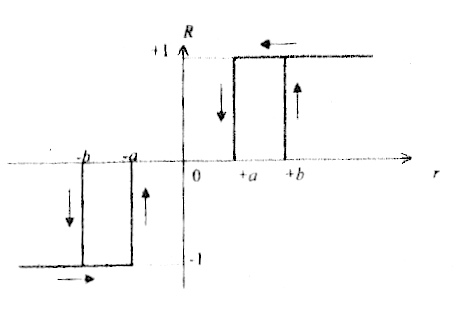
Рис. 15. Статическая характеристика релейного элемента
В качестве объекта регулирования принят объект с астатической характеристикой (например, бак-накопитель воды, в котором поддерживается уровень воды X). Передаточная функция такого объекта
Wоб(р)
=
![]() =
=
![]() ,
,
где Kоб – коэффициент усиления объекта; Tоб – постоянная времени объекта.
В качестве исполнительного механизма в схеме используется механизм постоянной скорости (например, типа МЭО). Передаточная функция этого звена
![]() =
=
![]() =
=
![]() ,
,
где Ти.м – время перемещения механизма от L = 0 до L = 100 % ХРО.
На рис. 16 представлена принципиальная электрическая схема технических средств автоматики, реализующих П-закон регулирования в соответствии со структурной схемой рис. 14.
Определите, какую функцию выполняет в схеме регулирования устройство, обозначенное на принципиальной схеме буквенным индек-сом, приведенным в табл. 2 для Вашего варианта задания.
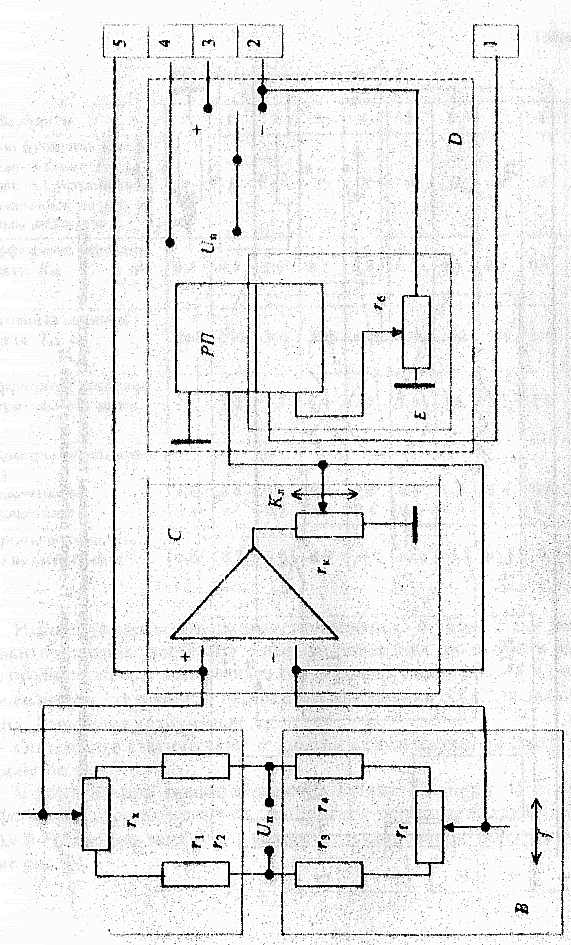
Рис.. 16. Принципиальные электрические схемы средств автоматики, реализующих П-закон регулирования (лист 1)
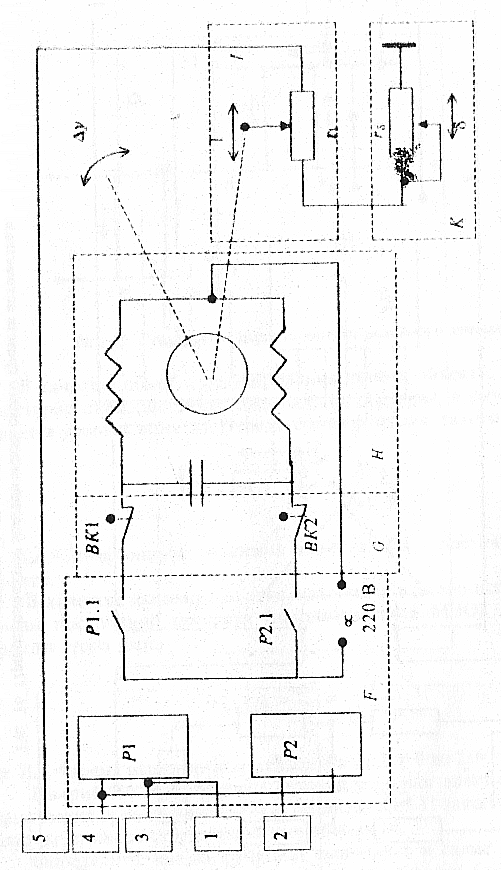
Рис.. 16. Принципиальные электрические схемы средств автоматики, реализующих П-закон регулирования (лист 1)
Таблица 2
Варианты задания к задаче 2.2
|
Варианты |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Какую функцию выполняет в схеме П-регулятора устройство, обозначенное на рис. 16 данным индексом |
А |
В |
С |
D |
Е
|
F |
G |
H |
J |
K |
|
Коэффициент передачи объекта, Коб |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
0,5 |
0,6 |
0,7 |
0,9 |
|
Постоянная времени объекта, Тоб, с |
200 |
250 |
300 |
350 |
400 |
450 |
130 |
120 |
110 |
100 |
|
Коэффициент усиления измерительного звена, Кл |
2,1 |
2,2 |
2,3 |
2,4 |
2,5 |
1,5 |
3,6 |
3,7 |
3,8 |
3,9 |
|
Параметры релейного звена: включение b отключение a |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
0,8 0,4 |
|
Величина возмущаю-щего воздействия, d |
0,6 |
0,7 |
0,8 |
0,9 |
-0,5 |
-0,6 |
-0,7 |
-0,8 |
-0,9 |
-1,0 |
Используя исходные данные, приведенные в табл. 2 для Вашего варианта задания, постройте графики изменения во времени выходных переменных для всех звеньев структурной схемы рис. 14 и определите величину статической ошибки регулирования Xст для заданного в табл. 2 значения возмущения z.
Определите статическую и динамическую характеристики этого устройства.
В контрольном примере решения задачи 2.2 (прил. 1) изложена графо-аналитическая методика построения переходной характеристики x = F(z, ) для замкнутой системы регулирования по структурной схеме рис. 14.
Контрольная работа № 3
Работа включает в себя две задачи, составленные по разделам 7, 8, 9 дисциплины.
Для решения задачи 3.1 Вы должны вспомнить материал по разделам теории вероятности и математической статистики, обратив особое внимание на экспоненциальный закон распределения случайной величины. При решении задачи 3.1 рекомендуется использовать материал пособия [6] è данные по надежности основных приборов электроавтоматики и пневмоавтоматики, которые приведены в каталогах на приборы, а также в прил. 2 к данному пособию.
Для решения задачи 3.2 необходимо вспомнить методику алгоритмического описания процессов обработки информации при реализации задач измерения, регистрации, регулирования, защиты и блокировки, программно-логического управления в простейших технологических операциях.
При решении задачи 3.2 необходимо иметь доступ к каталогам и справочникам на приборы и устройства автоматики, в которых приведены основные технические характеристики приборов.
Задача 3.1
Исходным материалом для решения задачи являются варианты конструктивной схемы модуля пневмоавтоматики, приведенной на рис. 713, и структурная схема блока формирования закона регулирования на рис. 14 для Вашего варианта.
Необходимо рассчитать параметры функциональных характеристик надежности (вероятность безотказной работы Р, интенсивность отказов , частоту отказов a и среднее время безотказной работы Т) для всей схемы модуля или устройства, используя для расчета числовые значения характеристик надежности отдельных элементов, устройств и приборов, входящих в схему. Основные характеристики надежности элементов, устройств и приборов следует отыскать в каталогах на технические средства автоматики [9, 10, 11, 19, 20], а также в прил. 2 к данному пособию. Пример решения задачи такого типа приведен в пособии [6] è â ïðèë. 1 настоящего пособия.
Задача 3. 2
При решении задачи 3.2 необходимо разработать структурную схему, включающую в себя основные приборы, устройства и модули, позволяющие реализовать управление объектом на универсальной ЭВМ согласно Вашему варианту (ЭВМ типа СМ-1800, персональный компьютер или программируемый контроллер) [7, 14].
По каталогам и справочникам выбираются конкретные типы приборов, устройств и модулей с учетом заданного диапазона измерения параметров, погрешности обработки информации, требований к динамическим характеристикам и возможности взаимодействия всех выбранных приборов в единой системе. Разрабатываются алгоритм, математическое и информационное обеспечение, необходимые для решения поставленной задачи, а также отдельные программные модули, реализующие элементы алгоритма.
Примеры решения подобных задач приведены в пособиях к лабораторным работам [3133].
0. Реализуйте для ЭВМ типа СМ-1800 или МС-1103 контур измерения и ввода в УВК температуры в морозильной камере. Диапазон изменения температуры 12...24С, погрешность измерения 0,5С.
Выбирите по каталогам [911, 1622] и справочнику [15] приборы, устройства и модули, преобразующие информацию (первичный преобразователь, УСО, арифметический модуль, блоки питания и согласования и т. п.).
Согласуйте все входные и выходные характеристики приборов, при необходимости введите дополнительные элементы согласования (делители, блоки питания и т. п.).
Разработайте алгоритм, математическое обеспечение и програм-мный модуль, обеспечивающие пересчет информации, поступившей от первичного преобразователя, в числовое значение измеряемого параметра (С).
1. Реализуйте на контроллере программно-логического типа (на-пример, МКП) контур автоматического управления насосом, подкачивающим продукт в бак-накопитель.
Включение насоса осуществлять при снижении уровня в баке до 0,2...0,1 м, выключение при повышении уровня до 2,5...2,7 м. Мощность электродвигателя 3 кВт.
Предусмотрите сигнализацию о работе насоса и возможность аварийного операторного отключения.
Выберите по каталогам [911, 1622] и справочнику [15] приборы и устройства, необходимые для реализации схемы (первичные преобразователи, усилители мощности, тумблеры, сигнальные табло, блоки питания и т. п.).
Разработайте алгоритм, таблицу информационного обеспечения и программный модуль, реализующие эту задачу на МКП-1.
2. Реализуйте для микроЭВМ СМ-1800 программный модуль позиционного регулирования давления в ресивере компрессорной установки. Давление необходимо поддерживать в пределах 0,70…0,75 МПа. Первичный преобразователь – функциональный (диапазон изменения входного сигнала – 0…1,0 МПа, выходного 5…+5 В). Управляющее воздействие реализуется через магнитный пускатель электродвигателя компрессора (сигнал включения 220 В, 0,5 А).
Разработайте алгоритм, математическое обеспечение и программный модуль, обеспечивающие позиционное регулирование давления. Инерционностью объекта пренебречь.
3. Реализуйте для ЭВМ типа МС-1103 или СМ-1800 контур измерения и ввода в УВК информации о количестве продукта, находящегося в баке промежуточного хранения.
Используйте в качестве первичного преобразователя измери- тель уровня (например, типа “Сапфир”). Диапазон изменения по уровню 0,5…3,5 м, площадь сечения бака 0,5 м2, плотность продукта 1,030 г/см3.