Материал: Частина 2
“Курс вищої математики. Частина 2.”
Найчастіше до заміни змінною в потрійному інтегралі вдаються з метою перейти від декартової прямокутної системи координат до циліндрової або сферичної системи. Див. Цилиндрическая и сферическая системы координат.
Розглянемо ці перетворення докладніше.
Циліндрова система координат.
P
z
0
θx
ρ
у
Зв'язок координат довільної точки Р простору в циліндровій системі з координатами в декартовій прямокутній системі здійснюється по формулах:
x = ρcos θy = ρsin θ
z = z
|
|
|
|
|
|
ρ = |
x2 + y 2 ; |
θ = arctg |
y ; |
z = z; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
||
Для представлення потрійного інтеграла в циліндрових координатах |
|||||||||||||||
обчислюємо Якобіан: |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∂x |
|
∂x |
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∂ρ |
|
∂θ |
∂z |
|
cos θ |
−ρsin θ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
i |
|
= |
∂y |
|
∂y |
∂y |
= |
sin θ |
ρcos θ |
0 |
|
|
= ρcos2 θ+ρsin 2 θ = ρ |
|
|
|
|
|
|
|||||||||||
|
|
∂ρ |
|
∂θ |
∂z |
|
|
||||||||
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
||||
|
|
|
|
∂z |
|
∂z |
|
∂z |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∂ρ |
|
∂θ |
∂z |
|
|
|
|
|
|
|
|
Разом:
Сферична система координат.
z
P
ρ
101
“Курс вищої математики. Частина 2.”
ϕ
0 |
θ |
x |
у
Зв'язок координат довільної точки Р простору в сферичній системі з координатами в декартовій прямокутній системі здійснюється по формулах:
x = ρsin ϕcos θy = ρsin ϕsin θ
z = ρcos ϕ
|
|
|
|
|
|
|
|
ρ = |
x2 + y 2 + z 2 ; θ = arctg |
y ; |
ϕ = arctg |
x2 + y 2 ; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
z |
|
|
|
|
Для представлення потрійного інтеграла в сферичних координатах обчислюємо |
||||||||||||
Якобіан: |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
∂x |
|
∂x |
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∂ρ |
∂ϕ |
|
∂θ |
|
sin ϕcos θ |
ρcos ϕcos θ |
−ρsin ϕsin θ |
|
|
|
||
|
|
|
|
|
|
|
|
|||||||||
|
i |
|
= |
∂y |
|
∂y |
|
∂y |
= |
sin ϕsin θ |
ρcos ϕsin θ |
ρsin ϕcos θ |
|
= cos ϕ(ρ2 sin ϕcos ϕcos2 θ+ |
||
|
|
|
|
|||||||||||||
∂ρ |
∂ϕ |
|
∂θ |
|||||||||||||
|
|
|
|
|
|
cos ϕ |
−ρsin ϕ |
|
0 |
|
|
|
||||
|
|
|
|
∂z |
|
∂z |
|
∂z |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
∂ρ |
∂ϕ |
|
∂θ |
|
|
|
|
|
|
|
|
|
+ ρ2 sin ϕcos ϕsin 2 θ) +ρsin ϕ(ρsin 2 ϕcos2 θ+ρsin 2 ϕsin 2 θ) = ρ2 cos2 ϕsin ϕ+ ρ2 sin3 ϕ =
= ρ2 sin ϕ.
Остаточно отримуємо:
∫∫∫F(x, y, z)dxdydz = ∫∫∫ f (ρ, ϕ,θ)ρ2 sin ϕdρdϕdθ
r τ
Геометричні і фізичні додатки кратних інтегралів.
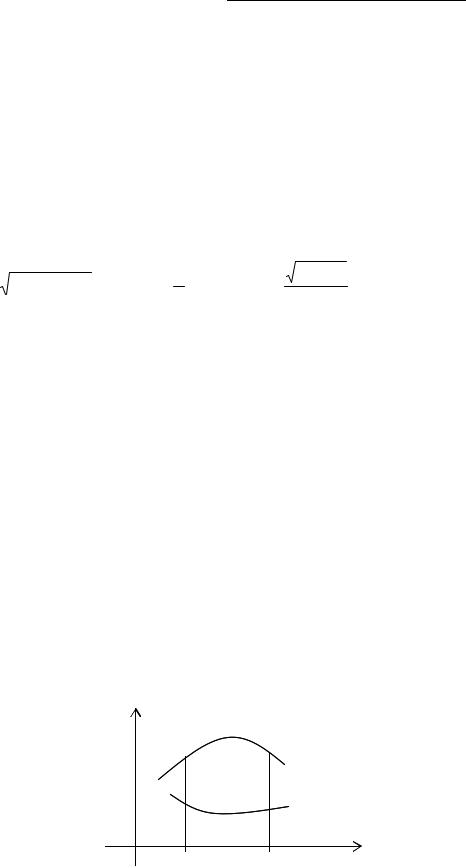
1) Обчислення площ в декартових координатах.
у
у= (x)ϕ
S
у = f(x)
а |
b |
x |
Площа S, показана на малюнку може бути обчислена за допомогою подвійного інтеграла по формулі:
b ϕ( x)
S = ∫ ∫dydx
a f ( x)
102
“Курс вищої математики. Частина 2.”
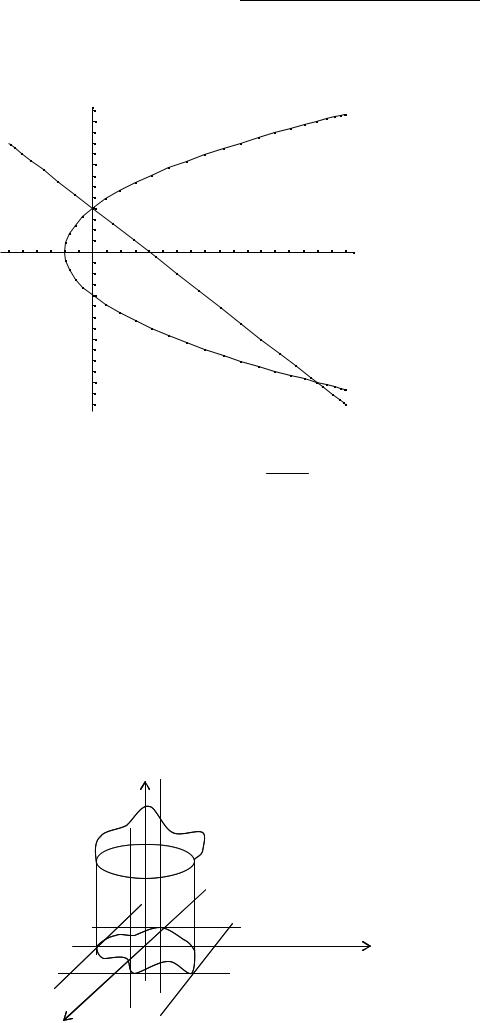
Приклад. Обчислити площу фігури, обмеженої лініями y2 = 4x + 4; x + у – 2 = 0.
Побудуємо графіки заданих функцій:
|
6 |
|
|
|
|
4 |
|
|
|
|
2 |
|
|
|
-2 |
2 |
4 |
6 |
8 |
|
-2 |
|
|
|
|
-4 |
|
|
|
|
-6 |
|
|
|
Лінії перетинаються в двох крапках – (0, 2) і (8 -6). Таким чином, область інтеграції обмежена по осі Ох графіками кривих від x = y 2 4− 4 до х = 2 – у, а по осі Оу
– від –6 до 2. Тоді шукана площа рівна:
|
1 |
|
|
y |
3 |
|
4y |
2 |
|
2 |
|
1 |
|
|
8 |
36 6 |
|
4 |
36 |
|
1 |
|
|
8 |
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
S = |
|
|
− |
|
|
− |
|
|
+12y |
|
= |
|
|
− |
|
−8 + 24 − |
|
− |
|
|
−12 6 = |
|
88 |
− |
|
|
= 21 |
|
4 |
3 |
2 |
|
4 |
3 |
3 |
|
2 |
4 |
3 |
3 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
−6 |
|
|
|
|
|
|
||||||||||||||||||
2) Обчислення площ в полярних координатах.
θ2 ϕ(θ)
S = ∫∫ρdρdθ = ∫∫dydx = ∫ ∫ρdρdθ
τ |
∆ |
θ1 f (θ) |
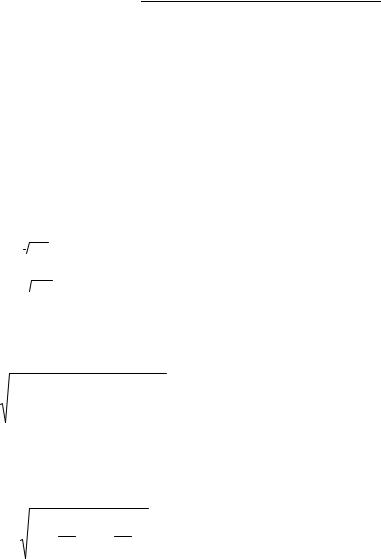
3) Обчислення об'ємів тіл.
Хай тіло обмежене знизу плосткостью ху, а сверху– поверхнею z = f(x,y) а з бокам – циліндровою поверхнею.
Таке тіло називається циліндроїд.
z
z = f(x, у)
x1 |
y1 |
x2 |
x
103
“Курс вищої математики. Частина 2.”
y2
у
V =
Приклад. Обчислити об'єм, обмежений поверхнями: x2 + y2 = 1; x + у + z =3 і площиною Хоy.
Межі інтеграції: по осі ОХ:
по осі Оy: x1 = -1; x2 = 1;
1  1−x
1−x
V = ∫ ∫(3 − x − y)dydx = 3π;
−1− 1−x2
1−x2
4) Обчислення площі кривої поверхні.
Якщо поверхня задана рівнянням: f(x, у, z)= 0, то площа її поверхні знаходиться по формулі:
|
|
|
∂f 2 |
|
∂f |
2 |
∂f 2 |
|
|||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
+ |
|
|
|
|
|||||
S = ∫∫ |
|
|
∂x |
|
∂y |
|
|
∂z |
dydx |
||
|
|
|
|
∂f |
|
|
|
|
|
||
∆ |
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Якщо поверхня задана в неявному вигляді, тобто рівнянням z = ϕ(x, у), то площа |
|||||||||||
цієї поверхні обчислюється за формулою: |
|
|
|
|
|
|
|
||||
S = |
∫∫ |
∂z 2 |
|
|
∂z |
2 |
dydx |
||||
1 + |
|
|
|
|
|
|
|||||
|
|
+ |
|
|
|||||||
|
|
∆ |
|
∂x |
|
|
∂y |
|
|
||
5)Вычисление моментів інерції площ плоских фігур.
Хай площа плоскої фігури (область ∆) обмежена лінією, рівняння якої f(x,y)= 0. Тоді моменти інерції цієї фігури знаходяться по формулах:
-щодо осі Ох:
-щодо осі Оу:
- відносно початки координат: I0 = I x + I y = ∫∫(x2 + y 2 )dydx - цей момент інерції
∆
називають ще полярним моментом інерції.
6) Обчислення центрів тяжіння площ плоских фігур. |
|
|||||||||
Координати центру тяжіння знаходяться по формулах: |
|
|||||||||
x |
|
= |
∫∫wxdydx |
; |
y |
|
= |
∫∫wydydx |
; |
|
C |
∆ |
C |
∆ |
|||||||
∫∫wdydx |
∫∫wdydx |
|||||||||
|
|
|
|
|
|
|||||
|
|
|
∆ |
|
|
|
|
∆ |
|
|
тут w – поверхнева щільність (dm = wdydx – масса елементу площі). 7) Обчислення об'ємів тіл за допомогою потрійного інтеграла.
104

“Курс вищої математики. Частина 2.”
Якщо поверхня тіла описується рівнянням f(x, у, z)= 0, то об'єм тіла може бути знайдений по формулі:
x2 y2 z2
V = ∫∫∫dzdydx
x1 y1 z1
при цьому z1 і z2 – функції від х і у або постійні, у1 і у2 – функції від х або постійні, х1
іх2 – постійні.
8)Координати центру тяжіння тіла.
x |
|
= |
∫∫∫wxdv |
|
y |
|
= |
∫∫∫wydv |
z |
|
= |
∫∫∫wzdv |
|
||
C |
r |
; |
C |
r |
|
; |
C |
r |
; |
||||||
∫∫∫wdv |
|
|
∫∫∫wdv |
||||||||||||
|
|
|
|
|
∫∫∫wdv |
|
|
|
|||||||
|
|
|
r |
|
|
|
|
r |
|
|
|
|
|
r |
|
9) Моменти інерції тіла щодо осей координат. |
|
|
|
|
|
||||||||||
I x = ∫∫∫( y 2 |
+ z 2 )wdv; I y = ∫∫∫(x2 + z 2 )wdv; |
|
I z |
= ∫∫∫(x2 + y2 )wdv; |
|||||||||||
r |
|
|
|
|
|
|
r |
|
|
|
|
|
|
r |
|
10) Моменти інерції тіла щодо координатних площин. |
|
||||||||||||||
I xy |
= ∫∫∫z 2 wdv; |
I xz = ∫∫∫y2 wdv; |
I yz = ∫∫∫x2 wdv; |
||||||||||||
|
|
|
r |
|
|
|
|
r |
|
|
|
|
|
r |
|
11) Момент інерції тіла відносно початки координат. |
|
||||||||||||||
|
|
|
I0 |
= ∫∫∫(x2 |
+ y 2 |
+ z 2 )wdv; |
|
|
|||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
У приведених вище формулах п.п. 8 – 11 r – область обчислення інтеграла за об'ємом, w – щільність тіла в крапці (х, у, z), dv – елемент об'єму
-у декартових координатах: dv = dxdydz;
-у циллиндрических координатах: dv = ρdzddθ;
-у сферичних координатах: dv = ρ2sindddθ. 12) Обчислення маси неоднорідного тіла.
M = ∫∫∫wdv;
r
Тепер щільність w – величина змінна.
105