Материал: Бортовая информационно-управляющая система (БИУС) транспортного средства
Мультиплексные системы значительно отличаются от обычных:
) в обычных системах электропроводки информация и питание передаются по одним и тем же проводам. В мультиплексных системах сигналы и электропитание разделены;
) в мультиплексных системах управляющие ключи непосредственно не включают и не выключают электропитание нагрузок;
) в некоторых случаях электронная схема узла должна постоянно считывать состояние управляющего ключа, даже когда большая часть электрооборудования обесточена. Например, положение ключа центрального замка дверей должно определяться и при парковке, когда многие системы выключены из соображений энергосбережения. Любая промышленная сеть, в том числе автомобильная, представляет собой совокупность датчиков, исполнительных механизмов, вычислительных устройств и органов управления, объединенных системой передачи данных и взаимодействующих по правилам, задаваемым протоколом. Протокол центральный элемент, определяющий характеристики и возможности связанных им систем.разделяет автомобильные сети на три класса: А, В и С, отличающиеся скоростью передачи данных и областями применения (таблица 2.4). Причем к сетям класса С предъявляются особо жесткие требования, поскольку они по одному каналу связи обслуживают наиболее ответственные системы автомобиля, а передаваемые по ним сообщения могут быть как периодическими, так и случайны ми. Такие сети должны быть не только надежными и защищенными от внешних воздействий, но и обеспечивать возможность расстановки приоритетов различным сообщениям, сигнализировать об ошибках в передаче управляющих сигналов, иметь скорость реакции на важное сообщение определенной длительности»[4].
Система управления курсовой во время работы
Таблица 2.4 Классификация автомобильных сетей
|
Класс сети |
Скорость передачи |
Область применения данных |
|
A |
10 кбит/с |
Системы комфорта |
|
B |
10125 кбит/с |
Самодиагностика |
|
C |
125 кбит/с-1 Мбит/с |
Системы управления двигателем, тормозами, коробкой передач, АБС и т.д. |
Автомобильные системы, независимо от их класса, могут выполняться (и
выполняются) по одной из трех топологических схем сетей: «звезда», «кольцо» и
«шина» (рисунок 2.4а).
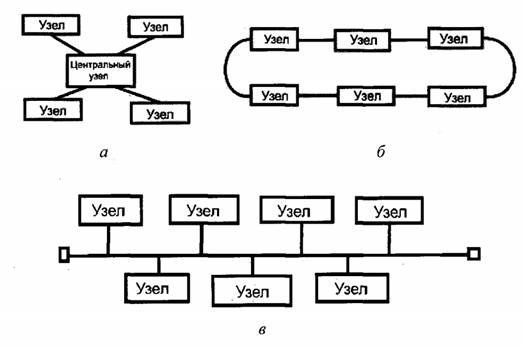
Рисунок 2.4а Топологические схемы автомобильных мультиплексных систем: а
- звезда; б - кольцо; в - шина
В схеме «звезда» есть центральный узел, связанный с каждым устройством системы отдельным каналом связи, т.е. для связи двух или более таких устройств необходимо, чтобы информация прошла через «центр». Плюс у схемы один простота протоколов обмена информацией, недостатков, к сожалению, гораздо больше, и они явно перекрывают этот плюс. В их числе: большое время задержки и значительное число проводов; ограниченное число коммутируемых устройств; низкая надежность изза наличия цен трального узла. Схема используется редко.
В схеме «кольцо» все устройства равноправны, так как последовательно объединены в кольцо. Значит, передаваемые сигналы должны проходить по нескольким звеньям, этим обусловлены и недостатки схемы: потеря работоспособности при разрыве цепи или выходе из строя одного устройства; большая задержка и ее увеличение при добавлении нового звена.
Схема «шина» позволяет устройствам функционировать в общей среде передачи данных, используя широковещательную передачу; не требует доработок при подключении дополнительных устройств; в ней возможна реализация любого типа доступа к среде передачи данных, а время их передачи невелико. Самая важная задача протокола здесь - решение вопросов доступа в среду передачи данных.
Очевидно, что для автомобиля предпочтительнее именно эта схема: она экономит провода, обеспечивает высокую надежность системы управления.
Схема «шина» реализует доступ трех типов: основной узел по определенным правилам опрашивает дочерние узлы; получив от синхронизирующего пакета сигнал, отправляет данные тому дочернему узлу, который соответствует полученному от пакета сигналу; получив сигнал от дочернего узла, открывает последнему доступ в сеть. Первые два типа доступа называются централизованными, третий - децентрализованным. Он особенно эффективен, так как не тратит время на «холостые» опросы, т.е. обеспечивает мгновенное реагирование на высокоприоритетное сообщение [4].
«Протокол CAN был разработан инженерами фирмы R. BoschGmbH для применения на автомобилях. Протокол соответствует международным стандартам ISO 11898 и ISO 11519 и используется несколькими производителями электронного оборудования. Протокол CAN признан автомобильными производителями США и Европы, применяется на современных легковых автомобилях, грузовиках, автобусах, сельскохозяйственном транспорте, в морском оборудовании, для автоматизации производства.
Протокол CAN поддерживает метод доступа CSMA/CDA к сети с равноранговыми узлами. Пакет данных имеет размер не более 8 байт и передается по последовательной шине, 15битовый циклический контроль избыточности обеспечивает высокий уровень целостности данных. Каждый узел состоит из двух составляющих. Это собственно CANконтроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU) (рисунок 2.4б).
Система управления курсовой устойчивостью автомобиля
Система управления курсовой устойчивостью автомобиля (англ.
VehicleDinamicControl, VDC) представляет собой систему с обрат ной связью, которая
позволяет сохранить курсовую устойчивость во время движения автомобиля. Она
объединена с тормозной системой и силовой передачей. Система VDC упреждает
опережение или запаздывание поворота автомобиля во время управления им.
Преимущества ABS и ASR развиваются системой VDC за счет повышения активной
безопасности движения во время управления автомобилем по следующим пунктам:
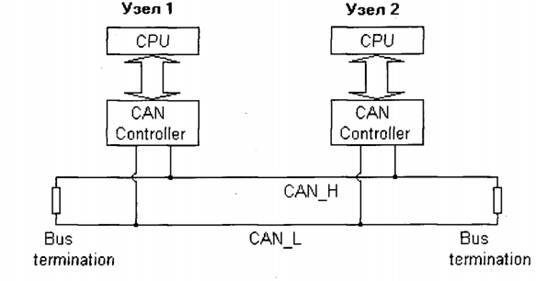
Рисунок. 2.4б Структура сети CAN
На рисунке 2.4впредставлена схема включения и битовые уровни протокола
CAN в соответствии с международным стандартом ISO 11898, на рисунке 2.4г - в
соответствии с международным стандартом ISO 11519.
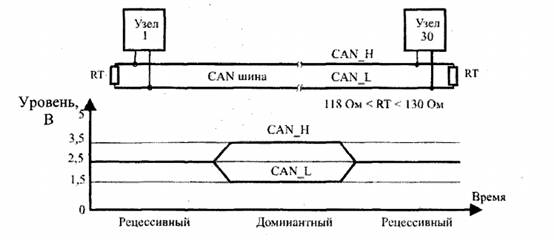
Рисунок 2.4в Схема включения и битовые уровни по ISO 11898
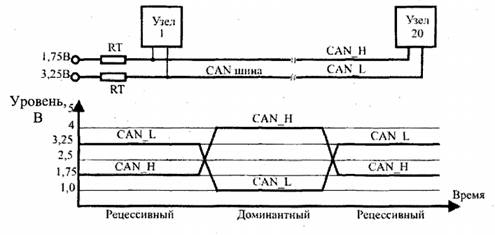
Рисунок 2.4г Схема включения и битовые уровни по ISO 11519
Используемый в настоящее время протокол CAN версии v2.0 состоит из двух частей: версия v2.0A со стандартным форматом кадра и v2.0B с расширенным форматом кадра. Версия v2.0A идентична предыдущей версии vl.2 и использует 11битовое поле идентификатора. В версии v2.0B поле идентификатора 29 бит. Расширенный формат кадра необходим для совместимости с существующим коммуникационным протоколом Л 850. Функции протокола CAN реализуются в микропроцессоре со встроенным контроллером CAN. Первыми на рынке появились контроллеры CAN с внешними драйверами для шины. В настоящее время про изводятся несколько типов CANконтроллеров, которые можно разделить на три группы в зависимости от поддержки ими расширенного формата кадра:
контроллеры v2.0A. Поддерживают только стандартный фор мат, не могут работать в сети, где передаются кадры расширенного формата;
контроллеры v2.0B, пассивные. Поддерживают только стандартный формат, но могут работать в сети, где передаются и кадры расширенного формата;
контроллеры v2.0B, активные. Поддерживают операции с кадрами стандартного и расширенного форматов.
Контроллеры CAN классифицируются также на полные и базовые в зависимости от организации буферизации данных.
Полный CANконтроллер имеет некоторое количество (обычно 14) специализированных буферов для временного хранения сообщений. При инициализации CANконтроллера можно сконфигурировать его, указав, какой кадр будет поступать в какой буфер.
Физически CAN представляет собой последовательную асинхронную шину, данные которой передаются или по витой паре, или по оптоволокну, или по радиоканалу. Шинoй могут управлять сразу несколько устройств. Теоретически число подсоединяемых к ней устройств не ограничено. Скорость передачи данных задается программно (не более 1 Мбит/с).
В настоящее время действующей спецификацией для протокола CAN служит «СAN Specificationversion 2,0», состоящая из двух частей: А и В, первая описывает обмен данными по сети с использованием 11битного идентификатора, а вторая 29битного. Если узел CAN поддерживает обмен данными только с использованием 11битного идентификатора, не выдавая при этом ошибки наоб мен данными с использованием 29битного идентификатора, то его обозначают «CAN2.0A Active, CAN2.0B Passive»; если с ис пользованием и 11битного, и 29битного идентификаторов то «CAN2.0B Active».
Существуют также узлы, которые поддерживают обмен данными с использованием только 11битного идентификатора, а при обнаружении в сети данных с 29битным идентификатором выдают ошибку. Но на автомобилях устанавливают, естественно, только согласованные системы. Они работают в двух сетях, имеющих разные (250 и 125 кбит/с) скорости передачи данных. Первыеобслуживают основные системы управления (двигатель, автоматическая коробка передач, АБС и т.д.), вторые - вспомогательные (стеклоподъемники, освещение и пр.).
Сеть CAN состоит из узлов с собственными тактовыми генераторами. Любой ее узел посылает сообщение всем системам, подсоединенным к шине, а получатели решают, относится ли данное сообщение к ним. Для этого предусмотрена аппаратная реализация фильтрации сообщений. Протокол CAN обладает исключительно развитой системой обнаружения ошибок и сигнализации о них, включающей поразрядный контроль, прямое заполнение битового потока, проверку пакета со общений CRCполиномом, контроль формы пакета сообщений, подтверждение верного приема пакета данных. В итоге общая вероятность не нахождения ошибки не превышает 4,7 • 1011. Кроме того, имеющаяся система арбитража протокола CAN исключает потерю информации и времени при «столкновениях» на шине.
Поле арбитража CANкадра (поле идентификатора сообщений) используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража.
Суть метода не деструктивного арбитража заключается в следующем (рисунок
2.4д): в случае, когда несколько контроллеров начинают одновременную передачу
CAN-кадра в сеть, каждый из них сравнивает бит, который собирается передать на
шину, с битом, который пытается передать на шину конкурирующий контроллер. Если
значения этих битов равны, оба контроллера пере дают следующий бит, и так
происходит до тех пор, пока значения передаваемых битов не окажутся различными.
Теперь контроллер, который передавал логический ноль (более приоритетный
сигнал), будет продолжать передачу, а другой (другие) контроллер прервет свою
передачу до того времени, пока шина вновь не освободится. Конечно, если шина в
данный момент занята, то контроллер не начнет передачу до момента ее
освобождения.
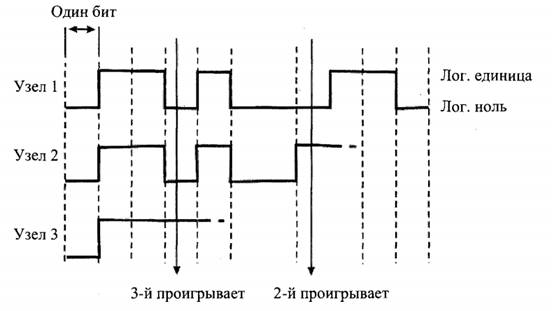
Рисунок. 2.4д Побитовый арбитраж на шине CAN
Как было сказано выше, поле идентификатора сообщений составляет 11 или 29 бит. Возможны два основных способа работы протокола: по событиям и временным меткам. В CAN реализован именно первый способ. Однако ЕС одновременно финансировал и программу исследования по второму способу коммуникационному протоколу для высоконадежных приложений ТТР («временно-пусковой» протокол).
Архитектуры систем на основе протоколов ТТР и CAN в целом сходны. Обе системы подразделяются на ряд подсистем (кластеров, т.е. распределенных компьютерных систем), и наборы узлов, объединенных последовательным каналом. Для выполнения функций, которые невозможно реализовать на одном узле (таких как точная координация работы двигателя, тормозов и др.), узлы обмениваются сообщениями через последовательный коммуникационный канал. Каждый узел, в свою очередь, состоит из трех элементов: компьютера, коммуникационного контроллера и подсистемы ввода-вывода для связи с датчиками и элементами управления. Все эти элементы связаны между собой двумя интерфейсами: коммуникационным интерфейсом сети (CNI) между компьютером и коммуникационным контроллером и управляемым интерфейсом объекта (COI) между компьютером и подсистемой ввода-вывода процесса.
На рисунке 2.4е схематично показано подключение линейного драйвера коммуникационного контроллера к скоростной шине. Система управления курсовой устойчивостью автомобиля
Система управления курсовой устойчивостью автомобиля (англ. VehicleDinamicControl, VDC) представляет собой систему с обрат ной связью, которая позволяет сохранить курсовую устойчивость во время движения автомобиля. Она объединена с тормозной системой и силовой передачей. Система VDC упреждает опережение или запаздывание поворота автомобиля во время управления им. Преимущества ABS и ASR развиваются системой VDC за счет повышения активной безопасности движения во время управления автомобилем по следующим пунктам:
обеспечение водителя активной помощью даже в критических динамических ситуациях;
увеличение курсовой устойчивости автомобиля даже при пре дельно сложных условиях дорожного движения для всех режимов эксплуатации, таких как полное или частичное торможение, движение накатом, разгон, торможение двигателем, изменение нагрузок;
повышение устойчивости движения даже во время экстремальных маневров управления (аварийная ситуация);
улучшение управляемости при предельно сложных условиях дорожного движения;
лучшее использование потенциала сцепления между шинами и дорожным покрытием в зависимости от условий движения по сравнению с ABS и ASR.
На характеристику рулевого управления автомобиля можно по влиять посредством скольжения шин. В системе VDC эта характеристика шин используется в целях внедрения сервоуправления.
Система VDC управляет не только скоростью вокруг вертикальной оси, но и курсовым углом. VDC не ограничивается ре жимами работы систем ABS и ASR, но также распространяется на режим движения автомобиля накатом и приводится в действие во время частичного торможения на пределе возможности управления автомобилем. Управление автомобилем на пределе физических возможностей должно учитывать три степени свободы автомобиля на плоскости дороги (продольная и поперечная составляющие движения и поворот относительно вертикальной оси). Первоначально необходимо определить, как правильно должен вести себя автомобиль в соответствии с действиями водителя (номинальное поведение) и как он фактически себя ведет на дороге (действительное поведение). В целях минимизации разницы между номинальным и действительным поведением, силы действия на шину должны управляться исполнительными механизмами.
«Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе и органов управления работой двигателя. Помимо скорости движения автомобиля вычисляются также необходимые характеристики коэффициентов сцепления между шинами и дорожным покрытием. Эти параметры оцениваются на основе сигналов, получаемых от датчиков скорости вращения колес, поперечного ускорения, угловой скорости относительно вертикальной оси и давления в тормозной системе. Затем рассчитывается момент относительно вертикальной оси, который нужен для приближенного приведения параметров действительно го состояния к параметрам требуемого состояния. В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах относительного скольжения колес определялись по средством контроллера VDC. Затем эти величины устанавливаются с использованием контроллеров скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы (модулятора давления) и электронного блока управления тягой двигателя. В данной системе применяется метод последовательных приближений компонентов ABS и ASR. Гидравлический модулятор с расширенными функциями ASR допускает высокий уровень динамического торможения всех колес при любых существующих температурах и в то же время надежно поддерживает необходимое разделение тормозных контуров. Необходимый крутящий момент двигателя может быть установлен посредством управления работой двигателя через интерфейс CAN. Далее рассмотрим, как ведет себя автомобиль во время работы Система управления курсовой устойчивостью автомобиля