Материал: Бортовая информационно-управляющая система (БИУС) транспортного средства
2.2 Электронные системы управления автомобилем
.2.1 Антиблокировочная тормозная система автомобиля
Структурная схема антиблокировочной тормозной системы с обратной связью
представлена на рисунке 2.2.1.
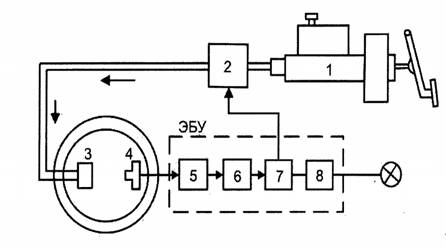
Рисунок 2.2.1 Антиблокировочная тормозная система (ABS) с обратной
связью: 1 - главный тормозной цилиндр; 2 - модулятор давления; 3 - колесный
тормозной цилиндр; 4 - датчик скорости колеса; 5 - входной усилитель ABS; 6 -
блок вычислений ABS; 7 - блок управления ABS; 8 - блок контроля исправности ABS
Электрοнный блοк управления (ЭБУ) собран на базе интегральных микросхем с применением цифровой технологии. Он состоит из четырех блоков и семи микросхем:
входной усилитель ABS для формирования и усиления сигналов датчика скорости колеса;
блок вычислений ABS для выполнения логических операций, сравнения угловых скоростей колес, определения пробуксовки ко лес, их замедления и для формирования команд исполнительному механизму;
блок управления ABS, представляющий собой усилитель мощности для привода электромагнитных клапанов в модуляторе давления;
блок контроля исправности ABS. При возникновении неисправности этот блок
отключает антиблокировочную систему. При этом основная тормозная система (без
регулировки) остается в рабочем состоянии.
2.2.2 Противобуксовочная система автомобиля
Противобуксовочная система (англ. AntiSlipRegulation, ASR) - это электрогидравлическая система автомобиля, предназначенная для предотвращения потери тяги посредством контроля за пробуксовкой ведущих колес. Иногда эту систему называют системой управления силой тяги. Во время ускорения автомобиля, когда излишний крутящий момент приводит к быстрому повышению частоты вращения одного или обоих ведущих колес, противобуксовочная система поддерживает проскальзывание ведущих колес в пределах допустимого уровня, выполняя следующие функции: регулирование силы тяги; поддержание курсовой устойчивости автомобиля.
Противобуксовочная система с замкнутой обратной связью (рисунок 2.2.2 а)
объединяется с блоком управления антиблокировочной системы для совместного
использования ее компонентов, включающих датчики частоты вращения колес и
клапаны управления давлением.
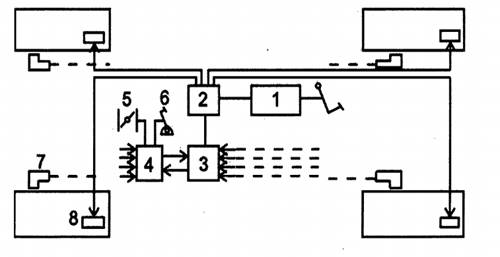
Рисунок 2.2.2 а - Принципиальная схема противобуксовочной системы
автомобиля: 1 - главный тормозной цилиндр; 2 - модулятор давления ABS/ASR; 3 -
электронный блок управления ABS/ASR; 4 - электронный блок управления тягой
двигателя; 5 - датчик положения дроссельной заслонки; 6 - датчик положения
педали акселератора; 7 - датчики угловой скорости колес; 8 - колесные тормозные
цилиндры.
Существует несколько вариантов противобуксовочных систем: управление двигателем, управление двигателем - тормозами, управление двигателем с блокировкой дифференциала. Первый вариант управления не использует тормоза и не требует модификации антиблокировочной тормозной системы. Для повышения быстродействия системы при резком ускорении не только прикрывается дроссельная заслонка, но и уменьшается угол опережения зажигания и количество впрыскиваемого топлива. Данные меры способствуют увеличению устойчивости движения автомобиля. Вместе с этой системой может применяться устройство блокировки дифференциала, что также увеличивает устойчивость автомобиля при ускорении. Подобная система управления тяговым усилием используется на автомобилях с задними ведущими колесами.
Во втором случае блок электронного управления используется антиблокировочной тормозной системой в качестве элемента системы управления тяговым усилием. Механическая связь между педалью управления подачей топлива и дроссельной заслонкой заменяется электронной. Педаль управления подачей топлива воз действует на потенциометр, который посылает сигнал о ее положении в ЭБУ. Датчики угловых скоростей колес позволяют обнаружить пробуксовку ведущих колес. При возникновении пробуксовки ЭБУ посылает сигнал для закрытия дроссельной заслонки. В том случае, если пробуксовка начинается только у одного колеса, оно притормаживается антиблокировочной тормозной системой и одновременно прикрывается дроссельная заслонка. Эффективными являются применение блокируемого дифференциала и при необходимости притормаживание обоих ведущих колес. Этот способ требует наличия дополнительной гидравлической системы, кроме ABS. «Бортовая информационно-управляющая система (БИУС) транспортного средства (ТС) - это комплекс автоматической оценки состояния
Блоксхема вариантов противобуксовочной системы (рисунок 2.2.2 б)
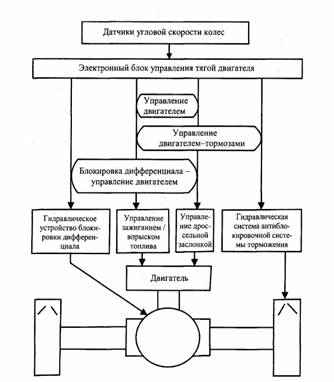
Рисунок 2.2.2 б.
2.2.3 Система управления курсовой устойчивостью автомобиля
Система управления курсовой устойчивостью автомобиля (англ. VehicleDinamicControl, VDC) представляет собой систему с обрат ной связью, которая позволяет сохранить курсовую устойчивость во время движения автомобиля. Она объединена с тормозной системой и силовой передачей. Система VDC упреждает опережение или запаздывание поворота автомобиля во время управления им. Преимущества ABS и ASR развиваются системой VDC за счет повышения активной безопасности движения во время управления автомобилем по следующим пунктам:
обеспечение водителя активной помощью даже в критических динамических ситуациях;
увеличение курсовой устойчивости автомобиля даже при пре дельно сложных условиях дорожного движения для всех режимов эксплуатации, таких как полное или частичное торможение, движение накатом, разгон, торможение двигателем, изменение нагрузок;
повышение устойчивости движения даже во время экстремальных маневров управления (аварийная ситуация);
улучшение управляемости при предельно сложных условиях дорожного движения;
лучшее использование потенциала сцепления между шинами и дорожным покрытием в зависимости от условий движения по сравнению с ABS и ASR.
На характеристику рулевого управления автомобиля можно по влиять посредством скольжения шин. В системе VDC эта характеристика шин используется в целях внедрения сервоуправления.
Система VDC управляет не только скоростью вокруг вертикальной оси, но и курсовым углом. VDC не ограничивается ре жимами работы систем ABS и ASR, но также распространяется на режим движения автомобиля накатом и приводится в действие во время частичного торможения на пределе возможности управления автомобилем. Управление автомобилем на пределе физических возможностей должно учитывать три степени свободы автомобиля на плоскости дороги (продольная и поперечная составляющие движения и поворот относительно вертикальной оси). Первоначально необходимо определить, как правильно должен вести себя автомобиль в соответствии с действиями водителя (номинальное поведение) и как он фактически себя ведет на дороге (действительное поведение). В целях минимизации разницы между номинальным и действительным поведением, силы действия на шину должны управляться исполнительными механизмами.
На рисунке 2.2.3 показана структура управления курсовой устойчивостью
автомобиля, состоящая из главного контроллера VDC и контроллеров скольжения. С
помощью главного контроллера вводится значение номинальной величины
проскальзывания XN для контроллера скольжения. Следящий блок определяет
переменную контролируемого состояния (курсовой угол автомобиля).
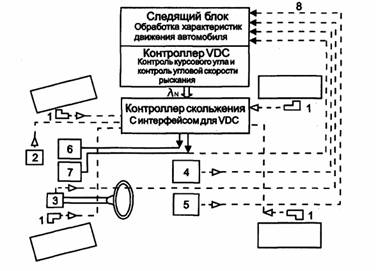
Рисунок 2.2.3 Принципиальная схема системы управления курсовой
устойчивостью автомобиля: 1 - датчики скорости вращения колес; 2 - датчик
давления в тормозной системе; 3 - датчик положения рулевого колеса; 4 - датчик
угловой скорости относительно вертикальной оси; 5 датчик поперечного
ускорения; 6 - модулятор давления; 7 - электронный блок управления тягой
двигателя; 8 - сигналы датчиков для VDC; λN -номинальное проскальзывание шины
«Оцениваются сигналы от датчика положения рулевого колеса, датчика
давления в тормозной системе и органов управления работой двигателя. Помимо
скорости движения автомобиля вычисляются также необходимые характеристики
коэффициентов сцепления между шинами и дорожным покрытием. Эти параметры
оцениваются на основе сигналов, получаемых от датчиков скорости вращения колес,
поперечного ускорения, угловой скорости относительно вертикальной оси и
давления в тормозной системе. Затем рассчитывается момент относительно
вертикальной оси, который нужен для приближенного приведения параметров
действительного состояния к параметрам требуемого состояния. В целях получения
требуемого момента рыскания необходимо, чтобы изменения в величинах
относительного скольжения колес определялись по средством контроллера VDC.
Затем эти величины устанавливаются с использованием контроллеров скольжения и
тягового усилия с помощью исполнительного механизма гидравлической тормозной
системы (модулятора давления) и электронного блока управления тягой двигателя.
В данной системе применяется метод последовательных приближений компонентов ABS
и ASR. Гидравлический модулятор с расширенными функциями ASR допускает высокий
уровень динамического торможения всех колес при любых существующих температурах
и в то же время надежно поддерживает необходимое разделение тормозных контуров.
Необходимый крутящий момент двигателя может быть установлен посредством
управления работой двигателя через интерфейс CAN. Далее рассмотрим, как ведет
себя автомобиль во время работы ПЗС. ПЗС реагирует на критические ситуации,
если известно, куда намерен ехать водитель и куда на самом деле едет
автомобиль. Ответ на первый вопрос система получает от датчиков, определяющих
угол поворота рулевого колеса и угловые скорости колес автомобиля. Ответ на
другой вопрос можно получить, измерив угол поворота автомобиля вокруг
вертикальной оси и величину его поперечного ускорения. Если от датчиков
поступают разные ответы на упомянутые выше вопросы, тоесть возможность
возникновения критической ситуации, при которой необходимо вмешательство ПЗС.
Критическая ситуация может проявляться в двух вариантах поведения автомобиля:
недостаточная и избыточная поворачиваемость автомобиля. В случае недостаточной
поворачиваемости автомобиля ПЗС дозированно подтормаживает заднее колесо на
внутренней сторонеповорота, а также воздействует на системы управления работой
двигателя и АКП (если автомобиль оборудован автоматической трансмиссией). В
результате добавления к сумме сил тормоз ной силы, приложенной к упомянутому
выше колесу, вектор результирующей силы, действующей на автомобиль,
поворачивается в сторону поворота и возвращает машину на заданную траекторию
движения, предотвращая выезд за пределы проезжей части и обеспечивая тем самым
вписываемость в поворот. В случае избыточной поворачиваемости автомобиля ПЗС
дозированно подтормаживает переднее колесо на внешней стороне поворота и
воздействует на системы управления работой двигателя и АКП (если автомобиль
оборудован автоматической трансмиссией). Вследствие чего вектор результирующей
силы, действующей на автомобиль, поворачивается наружу поворота, предотвращая
тем самым занос автомобиля и следующее за ним неуправляемое вращение вокруг
вертикальной оси. Еще одной распространенной ситуацией, в которой требуется
вмешательство ПЗС, является объезд неожиданно возникшего на дороге препятствия.
В случае, если автомобиль не оборудован ПЗС, события часто развиваются по
следующему сценарию. Чтобы избежать столкновения с неожиданно возникшим
препятствием, водитель резко поворачивает влево, а затем, чтобы возвратиться на
ранее занимаемую полосу, вправо. В результате автомобиль резко поворачивается и
возникает занос задних колес, переходящий в неуправляемое вращение автомобиля
вокруг вертикальной оси. Развитие ситуации в случае с автомобилем,
оборудованным ПЗС, выглядит несколько иначе. Водитель пытается объехать
препятствие, как и в первом случае. По сигналам датчиков ПЗС распознает
возникший неустойчивый режим движения автомобиля, производит необходимые
вычисления и (в качестве контрмеры) подтормаживает левое заднее колесо,
способствуя тем самым по вороту автомобиля. При этом сила бокового увода
передних колес сохраняется. Пока машина движется по дуге влево, водитель
начинает поворачивать рулевое колесо вправо. Чтобы способствовать повороту
автомобиля вправо, ПЗС пοдтормаживает правое перед нее колесо. Задние колеса
при этом вращаются свободно, благодаря чему оптимизируется действующая на них
боковая сила увода. Предпринятая водителем смена полосы движения может вызвать
резкий поворот автомобиля вокруг вертикальной оси. Чтобы предотвратить занос
задних колес, подтормаживается левое переднее колесо. В особо критических
ситуациях это торможение должно быть очень интенсивным, чтобы ограничить
нарастание боковой силы увода, действующей на передние колеса. Рекомендуется
выключать ПЗС при «раскачке» автомобиля, застрявшего в глубоком снегу или
рыхлом грунте, езде с цепями противоскольжения и проверке автомобиля на
динамометрическом стенде. Отключение ПЗС осуществляется нажатием кнопочного
выключателя на панели приборов, включение - повторным нажатием на указанную
клавишу. При запуске двигателя ПЗС находится в рабочем режиме» [4].
2.2.4 Система автоматического управления трансмиссией автомобиля
«Система автоматического управления трансмиссией автомобиля реализуется
благодаря появлению на автомобилях автоматических коробок перемены передач
(АКПП). АКПП обеспечивают бесступенчатое регулирование крутящего момента,
подводимого к колесам автомобиля. Большинство АКПП состоят из
гидротрансформатора, планетарных редукторов, фрикционных и обгонных муфт и
соединительных валов и барабанов. Также иногда применяется тормозная лента,
затормаживающая один из барабанов относительно корпуса АКПП при включении той
или иной передачи. Устройство управления АКПП - это набор золотников,
управляющих потоками масла к поршням тормозных лент и фрикционных муфт.
Положения золотников задаются как вручную механически рукояткой селектора, так
и автоматически. Автоматика может быть гидравлической или электронной.
Гидравлическая автоматика реагирует на изменение давления масла от
центробежного регулятора, соединенного с выходным валом АКПП, а также от
нажатой водителем педали газа, получая информацию о скорости автомобиля и
положении педали газа, на основании которой переключаются золотники.
Электронная автоматика предполагает использование соленоидов, перемещающих
золотники. Кабели от соленоидов выходят из АКПП и идут к расположенному вне
АКПП блоку управления, иногда объединенному с блоком управления впрыском
топлива и зажиганием (рисунок 2.2.4)»[4].
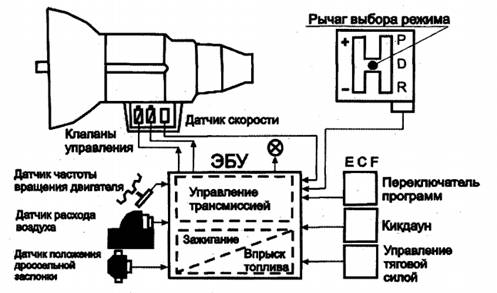
Рисунок 2.2.4 Управление автоматической коробкой перемены передач
2.2.5 Система автоматического управления подвеской автомобиля
«Система автоматического управления подвеской позволяет повысить не
только комфортабельность салона автомобиля для водителя и пассажиров, но и
безопасность движения. Это достигается за счет введения в подвеску
исполнительных механизмов, управляемых с помощью электронных устройств, которые
изменяют жесткость упругих элементов и сопротивление амортизаторов, что
способно уменьшить крен кузова на повороте и его продольный наклон при разгоне
и торможении. Разработаны также устройства, обеспечивающие горизонтальное
положение кузова при движении по неровным дорогам. Рассмотрим принцип
регулирования сопротивления амортизатора, жесткости подвески и высоты кузова на
примере одного колеса (рисунок 2.2.5).
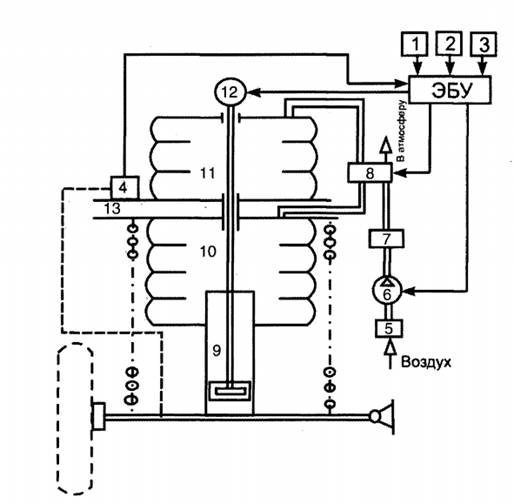
Рисунок 2.2.5 Схема автоматического регулирования подвески: 1 - датчик
скорости; 2 - датчик ускорения; 3 - датчик угловой скорости относительно
вертикальной оси; 4 - датчик положения кузова автомоби ля; 5 - фильтр; 6 -
компрессор с приводом; 7 -влагоотделитель; 8 электромагнитный клапан; 9 -
амортизатор; 10, 11 -пневмокамеры; 12 - электродвигатель; 13 - кузов
Упругий элемент расположен между кузовом автомобиля и нижним рычагом
подвески. Параллельно пружине подвески установлена основная пневмокамера, внутри
которой (иногда вне ее) находится амортизатор. В кузове, выше основной
пневмокамеры, расположена вспомогательная камера. Обе камеры соединены между
собой перепускным клапаном, проходное сечение которого регулируется
электромагнитным клапаном. Этот клапан связан с компрессором подпитки камер
воздухом через влагоотделитель. Атмосферный воздух поступает в компрессор через
фильтр. Регулирование жесткости подвески достигается изменением
производительности перепускного клапана, а изменение высоты кузова осуществляется
подкачиванием пневмокамеры от компрес сора или выпуском воздуха из нее в
атмосферу, что позволяет растягивать или сжимать основную пневмокамеру.
Сопротивление амортизаторов регулируется изменением проходного сечения
перепускных отверстий в поршне. Для этого в поршень вмонтирован поворотный
золотник. Золотник поворачивается стержнем, соединенным с электродвигателем.
ЭБУ дает команду электродвигателю повернуть золотник на необходимый угол, тем
самым изменяя сопротивление амортизаторов» [3].
2.3 Специализированные бортовые системы автомобиля
Специализированные бортовые системы автомобиля очень разнообразны.
Автопроизводители стремятся оснастить автомобиль как можно большим количеством
систем, повышающим его комфортабельность, эргономичность, управляемость,
информативность и безопасность. Рассмотрим некоторые из них.
2.3.1 Электронные противоугонные системы автомобиля
«Противоугонные системы являются стандартным оборудованием на большинстве новых автомобилей и могут устанавливаться на выпущенные ранее. Промышленность производит много различных противоугонных систем, их цена, как правило, связана с предлагаемым уровнем защиты. Противоугонные системы должны быть эффективными, надежными, иметь длительный срок службы, устойчивыми к внешним воздействиям, например к радиопомехам. Установка такой системы не должна ухудшать безопасность автомобиля.
Противоугонные системы реализуют защиту автомобиля условно на трех уровнях:
) по периметру. Система периметрической защиты использует микровыключатели для контроля за открывающимися панелями автомобиля (двери, капот, багажник). При попытке несанкционированного открытия панели включаются звуковой и световой сигналы. Иногда система дополняется датчиками, способными обнаруживать движения тела;
) иммобилизация двигателя. Иммобилизация двигателя осуществляется специальным ЭБУ, запрещающим запуск двигателя при получении сигнала тревоги. Это может быть выполнено двумя способами: а) аппаратной иммобилизацией, при которой некоторые электрические цепи системы пуска двигателя разрываются специальными реле или полупроводниковыми переключателями. Эффективность аппаратных систем иммобилизации сильно зависит от скрытности размещения разрывающих реле и немаркированных проводов в жгуте. Скрытность нужна для того, чтобы нельзя было шунтировать создаваемые этими устройствами разрывы в цепи; б) программной иммобилизацией, когда по команде противоугонной системы ЭБУ двигателя запрещает его запуск, например делает недоступными калибровочные диаграммы подачи топлива и зажигания. После этого двигатель хотя и будет проворачиваться стартером, но не запустится. Такие системы очень эффективны, нужно только исключить возможность запуска двигателя путем замены ЭБУ двигателя на другой работоспособный блок. Состав противоугонных устройств, входящих в стандартную комплектацию, зависит от модели автомобиля. Во всех случаях автомобиль комплектуется средствами периметрической защиты, многие противоугонные системы имеют иммобилизатор и защиту по объему. Обычно противоугонная система включается и выключается ключом замка двери или с дистанционного пульта, управляющего также и центральным замком. Припарковав автомобиль, водитель запирает двери и включает противоугонное устройство нажатием кнопки на дистанционном пульте управления (брелке). Светодиодный индикатор включения противоугонной системы начинает вспыхивать: сначала часто, информируя водителя о включении системы, затем редко, отпугивая потенциальных угонщиков. При попытке несанкционированного проникновения в автомобиль противоугонная система включает звуковой сигнал, периоди чески зажигает и гасит фары, иммобилизатор блокирует работу двигателя. Примерно через 30 с звуковые и световые сигналы прекращаются, чтобы не разрядить чрезмерно аккумулятор, но иммобилизатор остается включенным до тех пор, пока владелец автомобиля не выключит его дверным ключом или с дистанционного пульта управления. Существуют спутниковые охраннопоисковые системы, состоящие из двух основных частей: мобильного устройства (бортовой модуль), скрытно установленного в автомобиле, и круглосуточного диспетчерского центра. Диспетчерский центр обрабатывает ин формацию, полученную от бортового модуля с последующим отображением ее на электронной карте. Бортовой модуль представляет собой небольшой герметичный необслуживаемый блок, скрытно устанавливаемый на контролируемый автомобиль и подключаемый к его бортовой сети и GPS/GSM антеннам. Бортовой модуль потребляет очень мало электроэнергии, его можно эксплуатировать практически неограниченное время даже при выключенном двигателе. Бортовой модуль получает сигналы от спутников, обрабатывает их и автоматически или по запросу передает в диспетчерский центр необходимую информацию, которая регистрируется в базе данных. Диспетчерский центр это рабочее место диспетчера, оснащенное персональным компьютером, специальным программным обеспечением и приемником сообщений от бортовых модулей. Диспетчерский центр позволяет обрабатывать сообщения от большого количества автомобилей, содержит базу данных маршрутов следования, позволяет определить местоположение автомобиля на электронной географической карте. Разработана автосигнализация с обратной связью, когда сигнал тревоги передается прямо на брелок владельца автомобиля. Противоугонная система автомобиля с автозапуском обеспечивает запуск и прогрев двигателя в холодное время в автоматическом режиме. Система дистанционного управления позволяет управлять противоугонным устройством и центральным замком с некоторого расстояния. Она состоит из портативного передатчика, носимого водителем, и приемника, подключенного к ЭБУ противоугонного устройства и центральному замку. Передатчик размещается в брелке или самом ключе. Для миниатюризации применяются многослойные печатные платы и бес корпусные микросхемы. Питание осуществляется от миниатюрных литиевых батареек (как для наручных часов). Передатчики изготовляются на базе специализированных микро схем, например HCS200, HCS201 (Microchip), или недорогих 8раз рядных микроконтроллеров, например МС68НС05КЗ (Motorola). Второй вариант дороже, но он дает возможность применять одно и то же оборудование в передатчиках с различными функциональными возможностями для различных систем дистанционного управления, отличающихся криптографическими алгоритмами, интерфейсом и т.д. Противоугонная система включается и выключается передатчи ком при посылке соответствующего цифрового кода. Код передается последовательно, при этом используется инфракрасное излучение или радиосигнал в УКВдиапазоне. Системы, применяющие инфракрасное излучение, имеют малый радиус действия, требуют точного наведения луча передатчика, но не создают электромагнитных помех. УКВсистемы обладают большим радиусом действия, но их сигнал может быть перехвачен и декодирован угонщиками с помощью соответствующей электронной аппаратуры. УКВизлучатели могут быть источниками электромагнитных помех, поэтому их параметры регламентируются соответствующими законодательными актами. Работают они в диапазоне дециметровых волн (200-450 МГц). Передача сигналов кодовой информации в автомобильных противоугонных системах производится, как правило, в одном направлении из соображений удешевления оборудования. Брелки и электромеханические ключи приемников не имеют, хотя двунаправленные сигналы значительно усложнили бы взлом противоугонных систем. Для повышения секретности линий связи многие противоугонные системы используют набор кодов, в результате при каждом нажатии кнопки передатчика (брелка) посылается свой код из набора. Программное обеспечение приемника синхронизирует его работу с передатчиком, т.е. приемник ожидает смену кода. Если приемник и передатчик вышли из синхронизации (например, когда водитель случайно нажал кнопку передатчика вдали от автомобиля), дистанционное управление работать не будет, но система автоматически синхронизируется при отпирании двери ключом. В современных противоугонных системах используется динамический код Keeloq, алгоритм которого был разработан в сере дине 1980х годов южноафриканской фирмой Nanoteq. Технология динамических (плавающих) кодов делает бессмысленным и перехват кодов из эфира, и их подбор. Действительный код шифруется таким образом, что при каждой передаче излучается внешне совершенно другая кодовая посылка. В приемнике действительный код восстанавливается путем математической обработки. В результате становится невозможным предсказать, какая следующая кодовая комбинация снимет сигнализацию с охраны. Простое повторение предыдущей посылки не приведет к выключению сигнализации, так как использованные в прошлом посылки считаются недействительными. Предсказать же будущую посылку теоретически можно, только зная алгоритм шифрования кода, который держится фирмойизготовителем в секрете, и достаточное количество выборок кода для анализа. Кодовые комбинации повторяются с очень большим интервалом.