Материал: Бортовая информационно-управляющая система (БИУС) транспортного средства
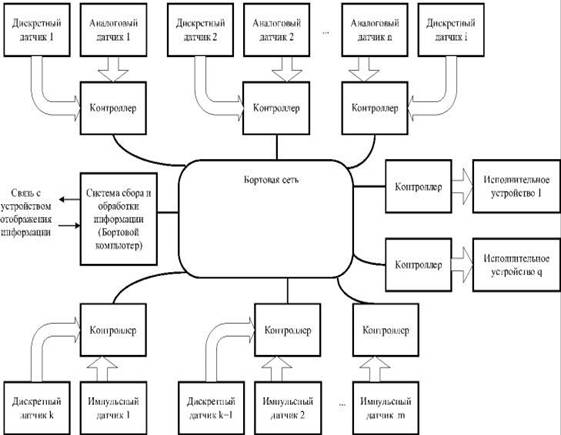
Рисунок 1.3.4 БИУС на автономных модулях
«Еще одним видом организации БИУС является использование программируемых логических интегральных схем -ПЛИС.
ПЛИС представляет собой микросхему, содержащую множнество несоединённых логических вентилей И/ИЛИ, которые с помощью специальных программных средств могут быть настроены и электрически сконфигурированы для выполнения специфических аппаратных функций.
Устройства на базе ПЛИС обладают реконфигурируемой цифровой архитектурой, включающей в себя матрицу конфигурируемых логических блоков, окруженных периферийными блоками ввода/вывода. В пределах матрицы ПЛИС возможна произвольная маршрутизация сигналов посредством управления программируемыми переключателями и коммутирующими линиями. Цепи ПЛИС представляют собой реконфигурируемую счетную машину, осуществляющую параллельную обработку данных и исполняющую приложения на аппаратном уровне микросхемы. Можно разработать на базе ПЛИС свои собственные схемы управления и сбора данных с тактированием и синхронизацией процессов с точностью до 25 нс. Благодаря возможности параллельной обработки данных, заложенной в ПЛИС, добавление новых вычислений в программу, исполняемую на микросхеме, не приводит к уменьшению скорости исполнения приложений.
Реконфигурируемая ПЛИС в сочетании с процессором реального времени, а вместе это -Compact RIO, позволяют создавать автономные встраиваемые и распределенные приложения, а также промышленные модули ввода/вывода со встроенным согласованием сигналов, возможностью прямого подключения датчиков и поддержкой горячего подключения.
ПЛИС обладает встроенными механизмами передачи данных во встроенный процессор реального времени для их последующего анализа, обработки и сохранения, а также для связи с внешними устройствами. При этом каждый из модулей ввода/вывода содержит в себе встроенные разъемы, систему согласования сигналов, цепи преобразования (такие как ЦАП и АЦП), также изоляционные барьеры. Поддержка расширенного диапазона напряжений и различных промышленных типов сигналов позволяет напрямую подключить к модулям датчики и управляемые устройства.
Благодаря своей невысокой стоимости, надежности и пригодности для использования в широком классе встраиваемых контрольноизмерительных приложений, Compact RIO может применяться практически во всех отраслях промышленности. Так, на базе систем Compact RIO решаются такие задачи, как групповое управление, дискретное управление, управление движением, бортовые измерения, мониторинг состояния машин, быстрое прототипирование управляющих систем, промышленные системы управления и сбора данных, распределенные системы управления и сбора данных, мобильный/портативный анализ шумов, вибраций и т.д.
В частности, ориентированная на создание пользовательских приложений технология RIO позволяет, например, создать аппаратную систему управления шаговым или сервоприводом, используя ПЛИС для расшифровки сигналов с тахометра или с квадратурного энкодера с целью проведения измерений координаты и скорости.
Появление устройств с поддержкой реконфигурируемого ввода/вывода существенно расширяет возможности технологии приборов. Для программирования устройств с технологией RIO применяется программная среда LabVIEW, которая позволяет разрабатывать аппаратную часть контрольноизмерительных систем, идеально настроенных для решения специфических задач.
К информационным и вычислительным ресурсам системы диагностики и контроля предъявляется ряд требований. Основной задачей всех измерительных систем является измерение и/или генерация реальных физических сигналов. В процессе сбора данных физические величины, такие, как напряжение, ток, давление и температура преобразуют в цифровой формат и вводят их в компьютер. Распространенные методы сбора данных реализуются с помощью встраиваемых в компьютер устройств и автономных измерительных приборов, приборов, поддерживающих интерфейс GPIB, систем стандарта PXI (расширение PCI для измерительной техники) и приборов с портом RS232.(GeneralPurposeInterfaceBus) стандартная шина, предназначенная для управления электронными измерительными приборами с помощью компьютера. Ее также называют IEEE 488, поскольку ее характеристики определяются стандартами ANSI/IEEE 4881978, 488.11987, 488.21992. Максимальное расстояние между любыми двумя приборами 4 м, среднее расстояние между приборами по всей шине 2 м. Максимальная (общая) длина кабеля 20 м. К каждой шине подключается максимум 15 приборов, причем не менее двух третей из них должны быть включены»[2].
Прежде чем компьютерная измерительная система сможет измерить некоторую физическую величину, например, температуру, физический сигнал с помощью датчика или измерительного преобразователя должен быть преобразован в электрический ток или напряжение. Под преобразованием сигналов следует понимать процесс предварительной обработки сигналов с целью улучшения точности измерений, качества изоляции цепей (развязки), фильтрации и т.д.
Чтобы измерять сигналы с датчиков, необходимо преобразовать их в форму, которую может воспринять устройство аналогоцифрового преобразования. Например, у большинства термопар выходное напряжение очень мало и соизмеримо с шумом. Следовательно, перед оцифровкой такого сигнала его необходимо усилить. К другим разновидностям преобразования сигналов относятся линеаризация, возбуждение датчика, развязка.
На рисунке 1.3.5 показаны некоторые распространенные типы датчиков и сигналов и требуемые для них виды преобразования.
Таким образом, наиболее целесообразно строить информационноуправляющую
систему на основе автономных модулей. В качестве измерительных устройств
текущих параметров следует применять интеллектуальные датчики (МЭМСы).
Рисунок 1.3.5 Типы датчиков и сигналов и виды преобразования
Бортовая сеть должна быть в варианте одно или двухпроводной или на
оптоволоконной линии передачи. Учитывая специфику транспортного средства в
части характера выполняемых работ и безопасности экипажа, линия связи должна
быть резервирована (в простейшем варианте дублирование по бортам)[2].
1.4 Классификация (типы) бортовых систем автотранспортного средства
Системы управления автомобилем:
) Подсистема получения информации:
от датчиков автотранспортного средства (закрытые);
от датчиков и внешних источников «автомобиль инфраструктура», «автомобиль автомобиль»;
) Подсистема обработки информации;
) Подсистема автоматического управления автомобилем.
Системы информации водителя:
)Подсистема получения информации:
от датчиков автотранспортного средства (закрытые);
от датчиков и внешних источников «автомобильинфраструктура», «автомобильавтомобиль»;
) Подсистема обработки информации;
) Подсистема отображения информации для водителя.
1.4.1 Бортовые системы интеллектуального транспортного средства
Системы управления автомобилем:
• Антиблокировочная система тормозов - ABS (AntilockBrakingSystem): Система повышает устойчивость автомобиля при торможении, обеспечивая возможность изменения траектории при торможении и в некоторых случаях уменьшая тормозной путь. Может служить источником информации о скорости автомобиля, состоянии дорожного покрытия.
• Противобуксовочная система - ASR (Automatic/AntiSlipRegulation), ATC (AutomaticTractionControl), ETS (ElectronicTractionControl) или DTC (DynamicTractionControl): Улучшает процесс движения на скользких дорогах, значительно снижая пробуксовывание колес. Может служить источником информации о состоянии дорожного покрытия.
• Система стабилизации движения (система поддержания курсовой устойчивости) - ESP (ElectronicStabilityProgram), ESC (ElectronicStabilityControl), DSM (DynamicStabilityManagement) или VSA (VehicleStabilityAssist), VSC (VehicleStabilityControl): Повышает курсовую устойчивость автомобиля, предотвращает занос автомобиля.
• Система помощи при экстренном торможении BA (BrakeAssist), BAS (BrakeAssistSystem) или EBA (ElectronicBrakeAssist или EmergencyBrakingAssistant): Уменьшает тормозной путь автомобиля путем автоматического повышения давления в тормозном приводе при быстром (экстренном) нажатии на тормозную педаль. Проводятся работы по использованию системы ВА в интеллектуальных системах управления транспортом (для предотвращения проезда линии «Стоп»). Развитием системы ВА является система PBA (PredictiveBrakeAssist). В этой системе используется локатор, оценивающий расстояние до препятствия и скорость сближения с ним, для расчета эффективности торможения с целью снижения вероятности наезда движущегося сзади транспорта.
• Круиз контроль: Система поддержания заданного режима движения.
• Адаптивный круизконтроль - ACC (AdaptiveCruiseControl): Система поддерживает заданную скорость и может автоматически её корректировать, поддерживая надлежащее расстояние междуТС. Для работы системы используются локационные датчики.
• Системы предотвращения столкновений автомобилей - СПСА: В системах используются радио или оптические локаторы, сканирующие пространство перед автомобилем. В простейших системах, при нарушении дистанции безопасности между движущимися ТС, водитель предупреждается световым/звуковым сигналом. В более сложных системах автоматически осуществляется торможение. Разрабатываются системы предупреждения не только фронтальных столкновений, но и боковых столкновений. Дальнейшим развитием СПСА является система Stop&Go, обеспечивающая безопасное движение с автоматическим торможением и ускорением в транспортном потоке. Системы СПСА сегодня являются «закрытыми», но в будущем могут стать «от крытыми», т.е. использующими информацию от навигационных систем и дорожнотранспортной инфраструктуры.
• Система торможения «по проводам» - BBW (BrakebyWire): Перспективная тормозная система, в которой управление торможением осуществляется электроникой (по проводам), а силовая, исполнительная часть может быть гидравлической, пневматической или электрической. Система активного рулевого управления - AFS (ActiveFrontSteering): Система корректирует управляющие воздействия водителя, улучшая управляемость и устойчивость автомобиля. Может использоваться в системе автоматической парковки транспортного средства.
• Активная подвеска автомобиля.
• Система предотвращения опрокидывания.
• Автоматическая система управления стеклоочистителями: Система получает информацию от оптического датчика, определяющего наличие и раз мер капель на ветровом стекле, включает и регулирует скорость стеклоочистителя.
• Автоматическая система управления световыми приборами: Световой датчик
определяет освещенность вокруг ТС и автоматически включает световые приборы.
Некоторые системы управляют переключением фар, для снижения ослепления
водителей встречного транспорта.
1.4.2 Системы информирования водителя
• Система информирования о техническом состоянии автомобиля: Следит за техническим состоянием автомобиля, в том числе осуществляет мониторинг давления в шинах. Система может быть как «закрытой» -информирует только водителя, так и «открытой» - передает информацию в сервисный центр.
• Система адаптивного освещения: Обеспечивает лучшее освещение дороги при проезде поворотов, поворачивая фары автомобиля в соответствии с поворотом объекты в видимые водителем изображения, повышая безопасность движения в условиях плохой видимости.
• Система предупреждения о пересечении дорожной разметки: Система предупреждает водителя о непроизвольном выходе с заданной полосы движения.
• Система предупреждения о возможности опрокидывания - RSC (RollStabilityControl).
• Система распознавания дорожных знаков: Видеосистема отслеживает дорожные знаки и воспроизводит их на мониторе (приборном щитке) или проецирует на лобовое стекло.
• Системы обнаружения препятствий при движении задним ходом: Эти системы обнаруживают препятствия (ультразвуком, радаром или инфракрасным излучением) при движении транспортного средства назад и, когда препятствие идентифицировано, информируют об этом водителя.
• Мониторинг состояния водителя: Система отслеживает управляющие реакции водителя, состояние его глаз и др. и предупреждает его звуковым (голосовым) сигналом для повышения его внимания.
• Системы обнаружения невидимых препятствий: К таким системам относятся различные устройства (с локационными датчиками различных типов, сканирующими пространство вокруг автомобиля), информирующие водителя о наличии препятствий. К этим системам также относятся системы ночного видения, которые используют инфракрасные излучатели и преобразуют невидимые на дороге объекты в видимые водителем изображения, повышая безопасность движения в условиях плохой видимости.
• Системы информирования о препятствиях впереди.
• Навигационные системы: Системы, в том числе активные, использующие информацию от датчиков внутри автомобиля, в случаях проезда автомобиля в тоннелях и других местах, где пропадает сигнал от спутников.
• Системы информации о состоянии дорожного движения: Системы предупреждают водителя о наличии заторов на дорогах, информируют об оптимальной скорости движения с целью проезда на разрешающий сигнал светофора и др.
• Системы информации о метеоусловиях.
• Система предупреждения о наличии пешеходов на проезжей части.
• Система предупреждения о наличии знака (линии) «Стоп».
.4.3 Cистема сбора и передачи информации
• «Черный ящик».
• Тахограф.
• Система передачи об аварии «eCall»: Система передает сигнал о ДТП по команде водителя или автоматически при срабатывании систем пассивной безопасности.
• Система электронной идентификации автомобиля (груза).
• Система предоставления данных об автомобиле для сервисных станций.
• Система позиционирования транспортного средства (передатчик местонахождения).
Отдельные системы АТС могут быть одновременно и «закрытыми» и «открытыми», т.е. информация от них может быть использована как внутри АТС, так и быть передана в инфраструктуру и другим участникам движения.
На рисунке 1.4.3 представлена блоксхема классификации бортовых систем
интеллектуального автотранспортного средства [3].
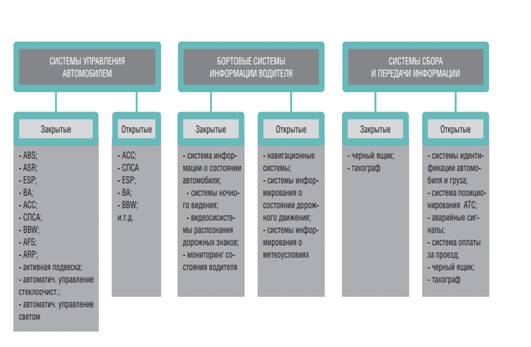
Рисунок 1.4.3 классификации бортовых систем интеллектуального
автотранспортного средства.
2. Виды БИУС, классификиция, примеры
.1 Классификация современных ботовых электронных систем автомобилей
Классификация современных бортовых электронных систем автомобилей (рисунок 2.1) включает в себя:
ЭСУА - электронные системы управления автомобилем;
ЭСУД - электронные системы управления двигателем;
СБСА - специализированные бортовые системы автомобиля;
ЛВС - локальные вычислительные сети.
Системы активной безопасности и другие.

Рисунок 2.1
Электронные системы управления автомобилем подразделяются на два типа:
обеспечивающие безопасность при движении автомобиля и улучшающие управляемость
и эргономичность автомобиля. Например, система курсовой устойчивости
предотвращает увод автомобиля в неуправляемый занос, а автоматическая коробка
перемены передач облегчает управление автомобилем. Электронные системы
управления двигателем включают в себя системы впрыска, зажигания и пуска
двигателя и другие приборы электрооборудования автомобиля, обеспечивающие
надежную работу двигателя и его высокий КПД. Специализированные бортовые
системы автомобиля включают в себя различные системы отображения информации,
необходимой для водителя; системы, повышающие комфортабельность автомобиля;
системы навигации; противоугонные устройства. Локальные вычислительные сети
являются мультиплексными системами передачи информации на основе технологии
CAN. Они позволяют значительно уменьшить число проводов, контактов и звеньев
связи на автомобиле[4].