Материал: Бортовая информационно-управляющая система (БИУС) транспортного средства
Система управления курсовой устойчивостью
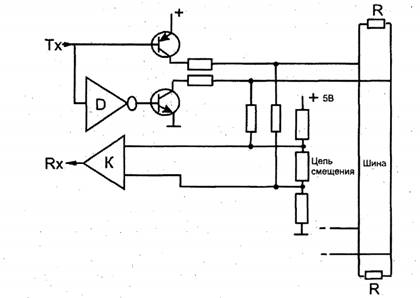
Рисунок 2.4е Подключение драйвера к шине
Когда логический уровень сигнала на входе Тх «1», оба транзистора в выходном каскаде закрыты, выход драйвера находится в высокоимпендансном состоянии, шина в состоянии недоминирующего уровня, дифференциальное напряжение примерно равно нолю, напряжение смещения около 2,5 В (см. рисунок 2.4в).
При подаче сигнала «О» на вход Тх оба транзистора отпираются, дифференциальное напряжение становится около 2,5 В, шина переходит в состояние доминирующего уровня.
Наличие цепи смещающего напряжения гарантирует смену полярностей сигналов на входах компаратора «К» при переходе шины от одного состояния к другому.
Компьютер узла содержит центральный процессор управления (ЦПУ), память, часы реального времени и собственную операционную систему, а также прикладное программное обеспечение. Он принимает и передает данные от и в CNI и COI, исполняет приложения реального времени в заданные временные интервалы.
Коммуникационный контроллер в случае протокола ТТР образован коммуникационным каналом и совокупностью управляемых временем коммуникационных контроллеров кластера, каждый из которых держит в памяти диспетчертаблицу, определяющую в какую точку данное сообщение послано или в какой точке ожидается его получение. Коммуникационный контроллер CAN, управляемый событиями, такой таблицы не имеет, поскольку передача сообщения инициируется командой с компьютера узла.
Назначение коммуникационной системы - передавать (в масштабе реального времени) сообщения либо о значении параметра (переменной состояния, например скорости), либо о возникновении события от узлапередатчика одному или нескольким узлам приемникам этого кластера. Сообщение состоит из трех частей: имени переменной состояния или события; наблюдаемого значения переменной состояния; времени наблюдения за переменной состояния или события. Ключевое место в нем занимает значение переменной состояния или события. Причем сообщение может не содержать значения времени, и тогда это значение принимается по факту приема сообщения.
Как видим, протоколы CAN и ТТЛ базируются на понятиях «событие» и «состояние». Но следует иметь в виду, что в ряде случаев информацию о новом состоянии можно упаковывать в со общение о событии, которое посылается только при изменении состояния.
Итак, протокол CAN есть коммуникационная система, управляемая сообщениями, которые посылаются, если компьютер узла запрашивает передачу сообщения и канал не занят. Но если другие узлы в данный конкретный момент времени тоже хотят послать сообщение, то посылается сообщение с наибольшим приоритетом.
Протокол ТТР - система, управляемая временем. Доступ к физической среде управляется бесконфликтной стратегией TDMA (разделенный во времени множественный доступ). Каждый узел получает уникальный временной слот в цикле TDMA. Каждый контроллер ТТР содержит таблицу диспетчеризации (список дескрипторов сообщений, MEDI) с информацией о том, какой узел имеет право послать и какое сообщение в конкретный момент времени, два дублированных канала коммуникации (для того,что бы не допустить возможную потерю информации).
Система, основанная на протоколе ТТР, обладает большой величиной
возможного потока данных (до 4 Мбит/с), надежностью (за счет дублирования
коммуникационного канала) и строгим регламентом работы во времени, который
позволяет заранее определить свойства системы. Вероятно, что будущее именно за
данной системой: она, как предполагается, будет управлять всеми жизненными
функциями автомобилей (электронным рулем, акселератором, тормозами и другими
высокоприоритетными устройства ми). Это особенно актуально в свете того, что на
протяжении последних лет демонстрируются многочисленные концептуальные
автомобили и даже ходовые макеты, которые не имеют механических связей между
органами управления и исполнительными механизмами. Однако на современном этапе
развития возможен только частичный мультиплекс, когда сетевая схема состоит из
набора элементов, включающих датчики и устройства, подключенные к
распределительному устройству посредством проводов[4].
3. Перспективные направления развития БИУС
Совсем недавно микропроцессорные системы зажигания, электронные системы управления гидравлическими тормозами, системы впрыска бензина, бортовая самодиагностика считались последними достижениями в области автомобилестроения. Теперь такие системы относят к классическим и устанавливают почти на каждый серийный автомобиль.
В наши дни на вновь разрабатываемые модели автомобилей дополнительно начинают устанавливать совершенно нетрадиционные бортовые автоматические системы, к которым относятся: информационная система водителя с микропроцессорным обеспечением; спутниковая навигационнопоисковая система; радарные и ультразвуковые системы зашиты автомобиля от столкновений и угона; системы повышения безопасности и комфорта людей в салоне; система круизконтроля; система «электронная карта»; мультиплексная электропроводка и другие системы, которые рассмотрены в предыдущих главах.
В данной работе рассматривалась различная организация (архитектура) бортовой информационно-управляющей системы. Сравнение этих архитектур показывает, что БИУС с центральной (однопроцессорной архитектурой) имеет множество недостатков из-за сложности системы, многофункцианальности, высоких требований к надежности и быстродействию системы.
Использование системы с иерархичной организацией дает ряд преимуществ. Это - распределение задач, возможность управления сложными агрегатами в режиме реального времени, что обеспечивает более высокую надежность системы.
Однако такая архитектура имеет свои недостатки - усложняется процедура решения задач управления: возникают сложности распределения общей задачи на ряд отдельных подзадач, сложности увязки этих подзадач между собой; сложности создания алгоритмического и программного обеспечения такой иерархической системы управления.
Наиболее перспективной архитектурой я считаю-децентализованную, или топологическую схему «шина». Развитие компьютерных и сетевых технологий позволяет в настоящее время перейти к созданию децентрализованных распределенных систем компьютерного управления, которые представляю собой множество полностью равноправных процессоров, объединенных в единую систему управления с помощью сетевого канала связи.
Такая организация БИУС имеет ряд преимуществ: отсутствует центральный процессор, выход которого из строя приводит к отказу всей информационно-управляющей системы; отказ любого процессора не приводит к катастрофическим последствиям - задачи, решаемые отказавшим процессором, могут быть перераспределены/размещены на работоспособных процессорах. Таким образом, помимо параллельности решения задачи управления, такая БИУС будет обладать высокой надежностью. Обмен информацией между отдельными подсистемами БИУС, датчиками и исполнительными механизмами может осуществляться по стандартным сетевым протоколам обмена.
Современные подходы автомобилестроителей к комплексному решению задач автоматического контроля, управления и регулирования приводят к тому, что подавляющее большинство новейших автомобильных систем бортовой автоматики являются автотронными, входными воздействиями для которых являются неэлектрические проявления режима работы, условий движения, дорожных ситуаций и других факторов, а выходными потребителями информации (объектами управления) - неэлектрические узлы, блоки, устройства, газообразные и жидкостные среды, имеющие место на автомобиле, и сам водитель. Это принципиальные отличия автотронных систем от чисто электронных и электрических.
Параллельно проводятся поиски более эффективных компьютерных технологий обработки информации в бортовых электронных системах. Разработаны и уже находят применение так называемые лингвистические функциональные преобразователи, работающие с нечеткими подмножествами лингвистических переменных, выраженных отдельными словами или целыми предложениями на естественном - английском или искусственном - компьютерном языке. При некотором усложнении логических и арифметических операций в микропроцессоров это позволяет повысить точность и скорость обработки сигналов. Значительно усложнился интерфейс, и возникла необходимость в ведении CAN протокола в мультиплексную систему.
Информационно-управляющие системы автомобиля развиваются в направлении не только повышения уровня программного обеспечения, но и применения в качестве индикаторов современных светодиодов, жидкокристаллических экранов и люминесцентных панелей.
В настоящее время практически отработана концепция автомобилей с повышением бортового напряжения до 42 вольт. Так существует два накопителя энергии: аккумуляторные батареи с напряжением 36 и 12 вольт, молекулярный емкостный накопитель на напряжении 42 вольта. Применение двухуровневой системы обусловлено резким возрастанием числа и мощности бортовых потребителей электроэнергии в системах управления двигателем, активной подвеской и т.д.
Для систем информирования по-прежнему характерны логометрические приборы, но уже с поворотом стрелки на 360 градусов и управление с помощью специализированной микросхемы, что, с точки зрения передачи аналоговой информации, сделало их конкурентоспособными по отношению к электронным комбинациям приборной панели. Появился и новый класс таких систем, как навигационные, которые связаны со спутниками, дорожными радиомаяками и позволяют водителю ориентироваться в сложных городских условиях.
Говоря о тенденциях и перспективах развития автомобильных бортовых устройств, следует отметить, что традиционно наиболее интенсивно совершенствуются узлы, агрегаты и схемы классического электрооборудования. Уже скоро в борт сеть автомобиля будет внедрено второе рабочее напряжение 42 вольта. Это связано с необходимостью повышения напряжения электропитания для новейших энергоемких потребителей, таких как силовые электромагнитные гидроклапаны, электромагнитные соленоиды силовых исполнительных устройств, мощные электродвигатели, силовые электронные коммутаторы, мультиплексная электропроводка и т. п. Ясно, что при повышении напряжения электропитания соответственно уменьшаются токи в цепях потребителей, что приводит к более надежной и экономичной их работе. Но сразу переводить все электропотребители на новое напряжение, как это было сделано при переходе с 6 на 12 вольт, в настоящее время нерационально. Причина тому - выпуск 12вольтовых потребителей огромными сериями, технологическая оснащенность производства. А самое главное, все эксплуатируемые в настоящее время автомобили оборудованы 12вольтными потребителями (электролампы, электродвигатели, электронное и микрокомпьютерное оснащение, аудио, радио, видеоаппаратура, бортовая самодиагностика и др.).
Единой стратегии перевода бортовой сети автомобиля на более высокое напряжение пока нет. Полагают, что некоторое время на автомобиле будет два напряжения: 12 вольт - для классического электрооборудования, и 42 вольта - для новейших мощных потребителей. Такой подход широко используется па многотонных грузовых автомобилях, где мощные электропотребители 24вольтовые, а освещение - от 12 вольт. Еще более яркий пример - электромобили. Здесь главная тяговая аккумуляторная батарея, управляющий контроллер и тяговый электродвигатель рассчитаны на напряжение 120 -380 В и соединены между собой отдельными цепями. При этом бортовая сеть остается двенадцативольтовой.
Из вышеперечисленных примеров видно, что функциональное многообразие бортовых электрических устройств приводит к необходимости применения на автомобиле нескольких первичных источников электроэнергии с различными рабочими напряжениями. При этом не исключено, что будет использоваться и переменное синусоидальное напряжение для специальных потребителей.
Под новые напряжения в первую очередь будут модернизированы бортовые электромашины. Уже в наши дни значительно видоизменен электростартер. В нем не применяется последовательное возбуждение, которое заменено возбуждением от постоянных магнитов. Жесткая механическая характеристика электродвигателя +12В стартера согласовывается с пусковым моментом ДВС посредством планетарного редуктора (редуктора Джемса). Давно нет коллекторных генераторов постоянного тока, их заменили многофазные синусоидальные генераторы с полупроводниковыми выпрямителями и электронными регуляторами напряжения. Но и такие генераторы могут значительно видоизмениться при появлении второго рабочего напряжения или если необходимость в высоковольтном переменном напряжении станет реальной.
Ведутся также разработки по созданию универсальной электрической машины, так называемого «стартергенератора», которая сможет выполнять две функции: запуск ДВС и подачу электроэнергии в бортсеть после запуска ДВС.
Современная микропроцессорная система зажигания с низкоуровневым многоканальным распределением энергии по свечам является наиболее совершенным решением проблемы принудительного электроискрового воспламенения ТВсмеси в цилиндрах поршневого ДВС. Но и это не предел достижений. Уже испытаны лазерные свечи зажигания, которые работают непосредственно от электронной схемы управления без промежуточного энергонакопителя. Это позволит значительно повысить надежность и КПД системы зажигания, а также избавить ее от высокочастотных электроискровых помех на другие узлы и блоки бортовой электронной автоматики. Электронной схемой управления может стать магнитный модулятор сжатия, работающий на ферромагнитных сердечниках насыщения. Схема такого модулятора показана на рис. 1.3, основным элементом в которой является высоковольтный трансформатор с насыщающимися сердечниками.
Если магнитопровод трансформатора ввести в режим насыщения, то его коэффициент трансформации резко падает и энергия из первичной обмотки во вторичную не трансформируется.
Выходной трансформатор имеет два изолированных друг от друга магнитопровода - М, и М2, охваченных общей первичной обмоткой W,. Каждый магнитопровод оснащен отдельной обмоткой управления (WB' и WB") и отдельной двухвыводной вторичной обмоткой (W2' и W2")
Когда по управляющей обмотке W,,' протекает ток, достаточный для насыщения сердечника М,, а обмотка WB" обесточена, то высокое напряжение будет наводиться только во вторичной обмотке W2". Если обесточить управляющую обмотку WEJ' и пропустить ток насыщения по обмотке WB", то насытится сердечник М и высокое напряжение будет трансформировано только в обмотку W2.
Система зажигания с трансформатором насыщения обладает высокой надежностью, малыми габаритами и весом.
В заключение следует отметить, что не все известные разработки бортовых
систем вышли из стадии экспериментальных исследований. Они используются в
основном на фирменных моделях спортивных и концептуальных автомобилей. Но, как
и прежде, почти все новации, испытанные на концепткарах, рано или поздно
начинают применяться на серийных автомобилях. Таковы тенденции развития
автомобильной техники и, в частности, систем бортового электрического,
электронного и автотронного оборудования.[5]
Рисунок 3 Магнитный модулятор системы зажигания
Заключение
Термин бортовая информационно-управляющая (БИУС) появился не так давно, но быстро вошёл в обиход разработчиков автоматизированных систем управления современных и перспективных транспортных средств. Сегодня БИУС можно считать отдельной, самостоятельной системой и обособленной областью профессиональной деятельности автомобильных инженеров. Именно под понятием БИУС сейчас объединяются множественные электронные системы транспортных средств. Такое объединение расширяет функциональные возможности транспортных средств, повышает их безопасность, энергоэффективность и «интеллектуальность» за счёт расширения возлагаемых на БИУС функций и реализации усложнённых, в том числе адаптивных, алгоритмов.