Материал: Алгебра_кортежей

Из доказанного непосредственно следует
Теорема 5.2. Мера ортогональной C-системы равна сумме мер содержащихся в ней C-кортежей.
Из теоремы 5.2 вытекает, что мера произвольной D-системы может быть вычислена, если преобразовать ее дискретное представление в ортогональную C-систему. Для произвольной C-системы можно, используя соотношения АК, разработать алгоритм преобразования такой C-системы в ортогональную, но во многих случаях проще вычислить по теореме 2.8 дополнение этой C-системы, преобразовать полученную D-систему в ортогональную C-систему и вычислить меру исходной C-системы, используя соотношение
(C) = (U) – ( |
|
), |
(5.2) |
C |
где (C) – мера исходной C-системы, (U) – мера универсума, (C) – мера АКобъекта, дополнительного к исходному. Мера универсума для множества атрибутов {X1, X2, ..., Xn} вычисляется как произведение
(X1) (X2) ... (Xn).
Отметим следующие очевидные свойства АК-объектов, погруженных в вероятностное пространство или в любое другое нормированное пространство,
вкотором мера каждого атрибута равна 1:
a)мера полной компоненты ( ) в C-кортежах и C-системах равна 1;
b)мера любого частного универсума равна 1;
c)мера любого АК-объекта есть число в интервале [0, 1];
d)мера пустого АК-объекта равна 0;
e)для произвольного АК-объекта A мера его дополнения равна 1 – (A);
f)для пары (A, B) АК-объектов (A B) = (A) + (B) – (A B);
g)в любом АК-объекте после элементаризации мера каждой компоненты равна сумме мер соответствующих квантов, содержащихся в этой компоненте.
165
5.1.2. Логико-вероятностный анализ и алгебра кортежей
Внастоящее время логико-вероятностный анализ (ЛВА) надежности и безопасности структурно сложных систем, разработанный И.А. Рябининым и его учениками, широко используется как в теоретических исследованиях, так и
впрактических приложениях [Рябинин, 1981; 2000; Соложенцев, 2004]. Однако
внастоящее время ЛВА применяется в основном в моделях исчисления высказываний, и при переходе к более сложным моделям со многими состояниями приходится использовать методики, предназначенные для частных случаев. Имеются программные реализации логико-вероятностного анализа, но
вних теряется прозрачность и доказательность используемых алгоритмов. Нередко сами алгоритмы, лежащие в основе программного обеспечения, приобретают статус "ноу-хау", в силу чего их суть в публикациях не раскрывается. Поэтому возникает необходимость в разработке методики, позволяющей с единых теоретических позиций подойти к созданию алгоритмов анализа структурно сложных систем. Применение АК позволяет решить перечисленные выше проблемы.
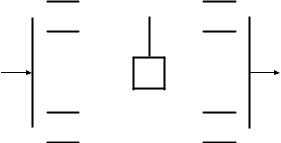
ВЛВА обычно в качестве исходных данных при вероятностных расчетах используются не логические формулы, а структурные схемы, отображающие причинно-следственные связи между множествами элементарных событий в системе. Если такие схемы могут быть представлены логическими формулами, то они легко преобразуются в вероятностные модели АК [Кулик, 2007 a]. В качестве примера рассмотрим двухполюсник (рис. 5.3) с мостиковой схемой.
 X1
X1 
 X4
X4 
a |
X3 |
b |
 X2
X2  X5
X5 
Рис. 5.3. Мостиковая схема
Такая схема, в частности, описывает систему энергоснабжения какоголибо объекта, в которой X1 и X2 – источники энергии, X3 – распределительный щит, X4 и X5 – потребители. Здесь элемент X3 выполняет роль переключателя, в силу чего между полюсами a и b допустимы только следующие пути: X1X4, X2X5, X1X3X5, X2X3X4. Это множество путей можно представить как ДНФ:
166

F = (X1 X4) (X2 X5) (X2 X3 X4) (X1 X3 X5). |
(5.3) |
Логическая функция F, связывающая состояние системы с состоянием элементов, в ЛВА называется функцией работоспособности системы (ФРС).
Пусть каждый элемент системы имеет два состояния (работоспособен и неисправен) и известны вероятности pi безотказной работы всех элементов. Требуется по ФРС определить вероятность безотказной работы всей системы.
В АК функцию F можно отобразить как C-систему в универсуме
X1 X2 X3 X4 X5 = {0, 1}5:
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
R = |
|
1 |
, |
|||
|
1 |
1 |
1 |
|
||
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
1 |
1 |
|
а ее отрицание – как D-систему
|
|
0 |
|
|
0 |
|
|
|
|
0 |
|
|
0 |
|
|
|
. |
||||||
R = |
|
0 |
0 |
0 |
|
||
|
|
|
|||||
|
|
0 |
|
0 |
|
0 |
|
|
|
|
|||||
Используя описанные в предыдущих разделах методы, преобразуем D-систему R в ортогональную C-систему (для упрощения компоненты {0} и {1} далее записываются как 0 и 1):
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
R = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
1 |
|
|
0 |
|
|
|
1 |
|
0 |
|
1 |
0 1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
0 |
0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||||||
|
|
0 |
|
|
|
|
|
|
0 1 |
0 |
|
1 |
|
0 |
|
0 |
|
|||||||||
|
|
1 |
|
|
|
|
0 |
|
= |
0 1 |
0 1 |
0 |
= |
|
|
|
|
1 |
|
|
|
|||||
|
|
|
|
|
|
|
0 |
|
0 1 0 |
|
0 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
|
1 0 |
|
|
|
0 |
|
||||||||
|
|
1 |
|
0 |
|
1 |
|
|
|
0 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
0 |
|
1 0 0 |
0 |
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(в последней системе второй и шестой C-кортежи объединены).
Поскольку уже известно распределение вероятностей событий в атрибутах (pi – вероятность безотказной работы элемента; qi = 1 – pi – вероятность отказа),
то можно сразу, используя ортогональную C-систему R, написать формулу для
167

расчета вероятности безотказной работы системы:
P(R) = 1 – P(R) = 1 – (q1q2 + p2q4q5 + q1p2q3p4q5 + p1q2q4q5 + p1q2q3q4p5).
Если речь идет о системе энергоснабжения, то из ФРС системы (5.3) следует, что система работоспособной даже тогда, когда работает хотя бы один потребитель. Но, допустим, по условию система работоспособна только если получают энергию и работают оба потребителя. В этом случае необходимо изменить ФРС:
F1 = F X4 X5.
Тогда в структурах АК имеем:
|
|
|
|
|
|
|
|
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||
R1 = R [ 1 1] = |
|
|
|
|
|
= |
1 |
|
|
. |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
1 1 1 1 |
|
|
1 1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Отсюда |
|
|
= |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||
R1 |
|
1 |
0 |
1 |
0 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
0 |
|
0 0 |
|
0 |
|
1 |
1 |
|
0 |
1 |
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выполнив вычисления, получим ортогональную C-систему: |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
1 |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На основе описанного решения получаем расчетную формулу вероятности безотказной работы:
F1 = 1 – (q4 + p4q5 + q1q2p4p5).
Для этой ситуации можно сформулировать и более жесткие ограничения. Например, мощность энергии источника X2 недостаточна для работы двух потребителей. Значит, в систему необходимо еще ввести дополнительное ограничение: если не работает источник X2, то потребителя X5 необходимо
отключить. Это условие можно выразить в виде формулы |
X2 |
|
X5 |
= X2 |
X5 |
, |
||||
представимую в виде D-кортежа и ортогональной C-системы: |
|
|
|
|||||||
C = ] 1 0[ = |
1 |
|
|
. |
|
|
|
|||
|
0 |
|
|
0 |
|
|
|
|||
Введем это ограничение в систему R1:
168
R2 |
= R [ 1 1] |
1 |
|
|
. |
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
Вычислим вначале пересечение [ 1 1] |
1 |
|
|
|
= [ 1 1 1]. |
|||||
|
|
|
|
|
|
0 |
|
|
0 |
|
После чего найдем:
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
|
|
|
1 |
|
1 |
|
R2 |
|
1 |
|||
= R [ 1 1 1] = |
1 |
1 |
1 |
. |
|
|
|
1 |
|||
|
|
1 |
1 |
1 |
|
|
1 |
1 |
Нетрудно убедиться, что в полученной C-системе второй C-кортеж включает в себя все остальные C-кортежи, т.е. R2 = [ 1 1 1], и вероятность безотказной работы системы при заданных ограничениях можно вычислить по формуле (здесь ортогонализации не требуется, так как система выражена единственным C-кортежем) P(R2) = p2p4p5.
В ЛВА пока не разработан единый подход к анализу и оценке вероятностных характеристик систем со многими состояниями, в то время как в АК эта проблема в общем случае решена (см. п. 2.4).
Пример 5.1. Рассмотрим мостиковую схему из рис. 5.3, но теперь некоторые элементы имеют не 2, а 3 состояния. Система задана в универсуме
X1 X2 X3 X4 X5 = {a1, a2} {b1, b2, b3} {c1, c2, c3} {d1, d2, d3} {e1, e2, e3}.
Модель такой системы в АК имеет вид:
{a1}
Q = {a2}
|
|
|
|
|
{e1,e2 |
} |
|
{b1,b2} |
|
|
{d1,d2} |
|
|
|
|
|
|
. |
|||||
{b ,b } {c ,c } |
|
|
|
||||
(e ,e } |
|||||||
2 |
3 |
1 |
2 |
|
2 |
3 |
|
|
|
{c2,c3} |
{d3} |
|
|
|
|
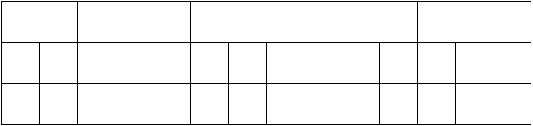
Распределение вероятностей элементарных событий приведено в табл. 5.1: Таблица 5.1.
X1 |
|
X2 |
|
|
X3 |
|
|
X4 |
|
|
X5 |
|
|
a1 |
a2 |
b1 |
b2 |
b3 |
c1 |
c2 |
c3 |
d1 |
d2 |
d3 |
e1 |
e2 |
e3 |
0.6 |
0.4 |
0.5 |
0.2 |
0.3 |
0.4 |
0.3 |
0.3 |
0.4 |
0.2 |
0.4 |
0.7 |
0.2 |
0.1 |
Необходимо выполнить расчет вероятностей событий Q и x2(Q).
169