Материал: А27819 Лазарев В.Л. Робастое управление
или энергоносителя) в выходной – y(t) (например, в какую-либо характеристику готовой продукции). Значения параметров x(t) и y(t) являются элементами режима работы объекта, так как протекание технологического процесса может определяться и другими параметрами. Входное стационарное случайное воздействие x(t) можно представить в виде суммы двух составляющих
0 |
|
x(t) mx x(t), |
(3.1) |
где mx – среднее значение (математическое ожидание) стационарного
0
случайного воздействия; x(t) – центрированная случайная составля-
0
ющая воздействия, для которой M [x(t)] 0 .
Очевидно, что наличие воздействия x(t) приведет к появлению на выходе объекта по координате y стационарной случайной составляющей y(t). Согласно принципу суперпозиции можно считать, что действие каждой составляющей входного воздействия x(t) приведет к появлению соответствующих откликов на выходе и поэтому случайная функция y(t) также может быть представлена в виде
0 |
|
y(t) my y(t), |
(3.2) |
|
0 |
где my – среднее значение случайного отклика в координате y; |
y(t) – |
центрированная случайная составляющая отклика.
Так как величины mx и my являются постоянными, значение my может быть однозначно определено через передаточную функцию по величине mx согласно уравнению статики
my mxW ( p) |
р 0 . |
(3.3) |
Если на объекте имеется система регулирования по параметру y, то величина my с учетом наличия контура регулирования также определяется из уравнения статики согласно выражению (1.5).
Зависимость основных характеристик входных воздействий и соответствующих откликов на выходе через функцию веса w( ) имеет следующий вид:
K y (t) |
w(τ1 ) w(τ2 )Kx (t τ1 τ2 ) dτ1dτ2 . |
(3.4) |
0 |
0 |
|
|
41 |
|
Дисперсию выходной координаты можно получить из выражения корреляционной функции при t = 0
Dy |
w (τ1) w (τ2 )Kx (τ1 τ2 ) dτ1dτ2 . |
(3.5) |
|
0 0 |
|
Спектральная плотность
Sу ( ) = A2 ( ) Sx ( ), |
(3.6) |
где А( ) – амплитудно-частотная характеристика (АЧХ) объекта или системы.
Выражение (3.6) имеет очевидную физическую подоплеку, так как спектральная плотность сигнала характеризует распределение квадратов амплитуд отдельных составляющих гармоник.
Дисперсия выходного параметра, помимо выражения (3.5), также может быть выражена через ее спектральную плотность. Действительно, для центрированной случайной величины согласно выражениям (2.17) и (2.20) имеем
Dy K y ( ) |
|
0 |
S y ( ) e j |
d |
|
S y ( ) d |
2 S y ( ) d . (3.7) |
|
0 |
||||||
|
|
|
|
|
|
|
0 |
Входящая в выражения (3.4) и (3.5) функция веса w( ) однозначно определяется через соответствующую передаточную функцию с помощью обратного преобразования Лапласа L–1
w( ) L 1[W ( p)] |
1 |
W ( j )e j |
d . |
(3.8) |
|
|
|||||
2 |
|||||
|
|
|
|
На практике, как отмечалось в разд. 1, функция веса достаточно просто может быть получена экспериментально при подаче на вход объекта импульсного воздействия. Функция веса наряду с передаточной функцией также может использоваться для описания зависимости между входным и выходным параметрами с помощью интеграла Дюамеля или интеграла свертки в виде
y(t) w ( ) x (t  ) d . (3.9)
) d . (3.9)
0
42
Входящая в выражение (3.6) функция А( ) также определяется из соответствующей передаточной функции W(p)
А( ) = W(j ) . |
(3.10) |
Кроме того, как показано в разд. 1, эта функция может быть определена экспериментально.
Для случая, когда на объект одновременно поступает несколько случайных воздействий, например, по двум различным каналам x1 и x2, динамические свойства которых заданы соответствующими функциями веса w1( ) и w2( ), реакция на выходе y может быть определена на основании принципа суперпозиции в виде
|
y(t) y1(t) |
y2 (t) |
|
|
w1( 1) x1 (t |
1) d 1 |
w2 ( 1) x2 (t |
1) d 1. |
(3.11) |
0 |
0 |
|
|
|
Для наиболее важного на практике случая, когда функции x1(t) и x2(t) взаимно независимы, корреляционную функцию выходной величины y(t) можно описать выражением
K y ( ) |
|
w1( 1)w1( 2 )Kx ( |
1 |
|
|
2 ) d 1d 2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
w2 ( |
|
1) w2 ( |
2 )Kx2 ( |
|
1 |
2 ) d 1d 2 . |
(3.12) |
|||||||||||||
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выражение для спектральной плотности выходной величины |
||||||||||||||||||||
будет иметь вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
y |
( ) |
A2 ( ) S |
x |
( ) |
A2 |
( ) S |
x |
|
( ); |
|
|||||||||
|
|
|
1 |
|
|
2 |
|
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
A1( ) |
|
|
W1( p) |
|
p |
j , |
|
A2 ( |
) |
|
|
W2 ( p) |
|
p j , |
(3.13) |
|||||
|
|
|
|
|
|
|
|
|||||||||||||
где W1(p) и W2(p) – передаточные функции объекта по каналам x1–y и x2–y соответственно.
43

В случае, если функции x1(t) и x2(t) взаимозависимы, то в выражениях (3.12) и (3.13) появятся дополнительные слагаемые, определяемые выражениями взаимных корреляционных функций K x1x2 и K x2 x1
и взаимных спектральных плотностей S x1x2 и S x2 x1 .
Приведенные в данном подразделе сведения позволяют оценить реакцию объекта на то или иное случайное воздействие с помощью набора объективных неслучайных характеристик. Все приведенные выше формулы будут справедливы и для проведения такого же анализа систем управления, только в этом случае необходимо уже рассматривать динамические свойства (в виде передаточной функции, функции веса и др.) не объекта, а всей системы, состоящей из объекта и контура управления. При этом формулировка задачи для проведения подобных исследований может быть представлена в следующем виде. На вход объекта (или системы) поступает стационарное случайное воздействие x(t), характеризующееся математическим ожиданием mx и корреляционной функцией Kx(t). Динамические свойства объекта по каналу поступления воздействия – выходная величина y – заданы (либо в виде передаточной функции W(p), либо в виде функции веса w(t) или переходной характеристики h(t)). Требуется оценить отклик объекта y(t) на это воздействие, который является случайной функцией, в виде математического ожидания my и корреляционной функции Ky( ). В ряде практических задач интерес представляет дисперсия Dy, а не корреляционная функция.
3.3. Пример исследования влияния случайных воздействий на управление процессом термообработки
Термообработка в биотехнологической промышленности применяется как один из основных этапов обработки сырья и полуфабрикатов в различных производствах.
Энергоноситель, например горячий воздух или пародымовоздушная смесь, подается в термоагрегат от специального аппарата – теплогенератора. Существует множество типов теплогенераторов, основанных на использовании различных видов энергии (электрической, энергии пара, энергии, получаемой при сгорании органического топ-
44
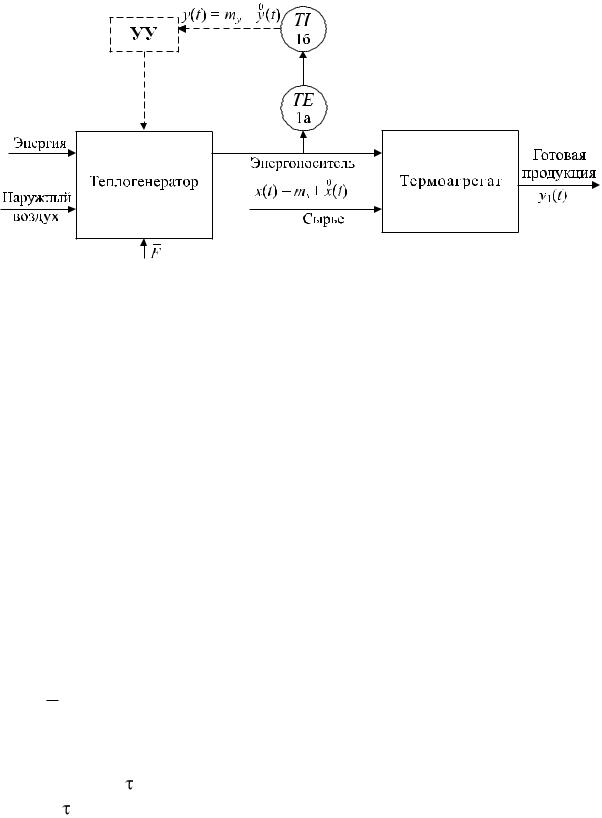
лива, и др.) Фрагмент схемы, иллюстрирующей организацию управления температурой в термоагрегате, приведен на рис. 3.1.
Рис. 3.1. Схема контура управления температурой
втермоагрегате
Вданном примере энергоноситель получают в результате нагрева наружного воздуха (или регенерированной паровоздушной смеси). Также могут использоваться и другие схемы подготовки энергоносителя, например, основанные на смешении потоков горячего и холодного воздуха, и др. Температура энергоносителя, подаваемого в термоагрегат, контролируется с помощью измерительной цепи, состоящей из первичного преобразователя ТЕ (поз. 1а) и вторичного показывающего прибора ТI (поз. 1б). Информация от измерительного прибора в виде параметра у(t) поступает в устройство управления УУ, которое и вносит соответствующее управляющее воздействие в теплогенератор. Зачастую в промышленных условиях
вкачестве устройства управления выступает оператор, осуществляющий ручное управление теплогенератором (поэтому данный участок контура управления обозначен пунктиром). В силу множества причин (например, возмущений, которые на схеме обозначены векто-
ром F ) температура энергоносителя на выходе из теплогенератора является стационарной случайной функцией времени x(t), которая характеризуется математическим ожиданием mx и корреляционной функцией Kx( ). Достаточно адекватным представлением функции Kx( ) для подобных ситуаций является
45