Материал: А27819 Лазарев В.Л. Робастое управление
1. РЕЖИМЫ РАБОТЫ СИСТЕМ УПРАВЛЕНИЯ ЦЕЛИ И ЗАДАЧИ УПРАВЛЕНИЯ
1.1. Основные положения Классификация режимов работы
Организация управления объектом предусматривает проведение анализа режимов работы системы управления, определение критериев качества ее работы в типовых режимах в соответствии с назначением объекта, целями и задачами управления. Последующий синтез системы управления направлен на определение структуры системы и функций отдельных ее элементов, обеспечивающих надлежащее качество работы системы, особенно в режимах, приоритетных по целям управления.
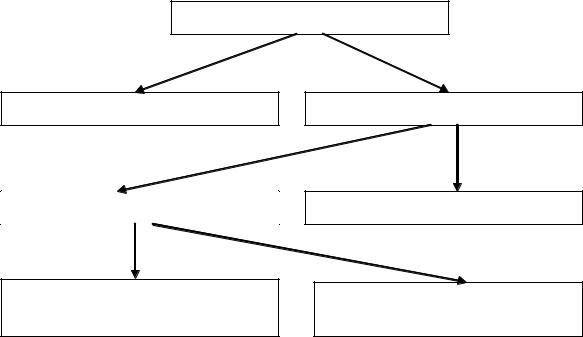
Система управления объектом, оборудованием может находиться в одном из режимов работы, классификация которых приведена на рис. 1.1.
Режимы работы
Переходные режимы
Динамические режимы
Стационарные детерминированные режимы
Стационарные режимы
Статические режимы
Стационарные случайные режимы
Рис. 1.1. Классификация режимов работы систем управления
Приведенная на рис. 1.1 классификация не является подробной, так как отдельные элементы схемы допускают дальнейшую детализацию. Например, стационарные динамические детерминированные режимы работы систем в свою очередь могут быть подразделены
6
на режимы, в которых внешние воздействия изменяются с постоянной производной воздействия (скоростью, ускорением и т. д.), и режимы, где внешние воздействия изменяются по детерминированному закону (например, гармоническому). Однако для анализа задач управления и методов их решения приведенная классификация представляется достаточно подробной. Ниже приводится анализ основных режимов работы систем управления применительно к задаче синтеза и с учетом специфических особенностей объектов биотехнологической и химической отраслей промышленности.
1.2.Работа систем управления в переходных режимах
Впромышленных условиях работа систем управления объектами в переходных режимах имеет место в основном в следующих случаях:
– при выводе объектов на рабочий режим перед началом работы;
– при смене режимов работы, например, при переходе на переработку новой партии сырья или при переходе на выпуск новой продукции;
– при выключении оборудования после завершения работы;
– при возникновении различных нештатных ситуаций.
Вкачестве примера, иллюстрирующего данные режимы, можно рассмотреть работу различных пароварочных камер, которые широко используются для термообработки колбас, копчения рыбопродуктов, выпечки хлебобулочных изделий. Перед началом работы такие объекты выводятся на соответствующий режим или, как говорят, «прогреваются до нужной кондиции». С этой целью в локальные регуляторы, которые осуществляют поддержание необходимых температурновлажностных режимов в различных зонах камер, вводят значения соответствующих уставок и начинают подачу энергоносителей (пара, электроэнергии, горячей воды). В результате последующей работы таких контуров регулирования осуществляют вывод объектов на требуемый режим, после чего начинают подачу сырья и осуществляют его обработку. Аналогично осуществляют переход на другие режимы обработки. Например, при термообработке колбасных изделий переход на выпуск других видов колбас, отличающихся диаметром батона,
7
видом колбасной оболочки, химическим составом колбасного фарша и другими параметрами, должен предусматривать соответствующее изменение режимных параметров на этапах термообработки (подсушка, обжарка, варка) и последующего охлаждения. Время выхода подобных объектов на рабочие режимы зависит от конструктивных особенностей и, в первую очередь, определяется такими характеристиками, как время запаздывания и постоянные времени по каждому из каналов управления. В промышленных установках это время может достигать десятки и даже сотни минут. Следует также отметить, что при отсутствии систем локального регулирования на объекте его вывод на рабочий режим или перестройка режима работы осуществляется оператором в ручном режиме.
Задача управления объектом в переходном режиме, как правило, состоит в минимизации времени переходного процесса. Это объясняется тем, что во время выхода оборудования на новый режим продукция не выпускается и, следовательно, имеют место непроизводительные простои, снижающие, в конечном счете, его производительность. В настоящее время задача синтеза оптимальной по быстродействию системы управления при наличии ограничений по величинам управляющих воздействий (т. е. для реальных производственных условий) решается с использованием принципа максимума Л.С. Понтрягина. Практическая реализация принципа максимума применительно к оптимальной по быстродействию системе автоматического управления (САУ) более известна в технике как теорема об n-интервалах, доказанная А.А. Фельдбаумом. Смысл этой теоремы заключается в том, что оптимальное по быстродействию управление объектом состоит из n-интервалов. В каждом интервале управляющее воздействие должно принимать свое предельное значение в соответствии с существующими ограничениями. Конец каждого интервала наступает в момент достижения управляемой величиной установленного значения. В начале следующего интервала происходит изменение знака управляющего воздействия. И так далее, пока выходная величина объекта не достигнет установленного режимного значения. На последнем интервале управляющее воздействие устанавливается на величине, соответствующей заданному статическому режимному значению выходной величины. Здесь следует отметить, что число интервалов может быть меньше n в случае ненулевых начальных условий.
8
Если объект является многозвенным и имеют место ограничения не только на величину входного управляющего воздействия, но также на соответствующие промежуточные переменные, число интервалов управления возрастает. Однако общим во всех случаях является то, что оптимальный по быстродействию вывод объекта на режим реализуется релейным управлением. Отсюда следует вывод о том, что в этом случае цель управления достигается в результате реализации строгого алгоритма. Задачи системы управления сводятся в основном к фиксации достижений управляемыми величинами требуемых значений на каждом интервале управления и организации позиционных переключений исполнительных устройств, а также к выполнению функций защиты и блокировок при возникновении различных нештатных или аварийных ситуаций.
Описанный алгоритм оптимального управления переходным процессом по быстродействию справедлив и в случаях, когда осуществляется возврат объекта к исходному состоянию, отклонение от которого произошло в результате действия различных возмущений. Известно, что для «линейных» объектов (динамика которых описывается линейными дифференциальными уравнениями) закон оптимального по быстродействию управления не зависит от вида возмущений и начальных условий, т. е. инвариантен относительно этих факторов. Данное обстоятельство существенно упрощает синтез системы управления переходными режимами таких объектов. Здесь следует отметить, что подавляющее большинство объектов биотехнологической промышленности достаточно адекватно описывается линейными моделями. Такими объектами, например, являются: камеры для термообработки колбасных изделий, печи для выпечки хлебобулочной продукции, установки для горячего и холодного копчения мясо- и рыбопродуктов, аппараты для тепловой обработки жидких продуктов, автоклавы для стерилизации консервов, сушильные установки, ректификационные колонны, камеры для замораживания и дефростации и другие. В ряде случаев вывод отдельных объектов на рабочий режим может быть осуществлен обслуживающим персоналом опыт- но-интуитивным путем, который на практике, в зависимости от квалификации операторов, в большей или меньшей степени приближается к оптимальному релейному управлению.
9
Необходимо также иметь в виду, что в довольно редких случаях, когда критерием оптимизации переходного режима является не быстродействие, а какой-либо другой критерий (например, минимизация энергозатрат), использование релейного управления, предусматривающего форсирование режимов, может оказаться не оптимальным.
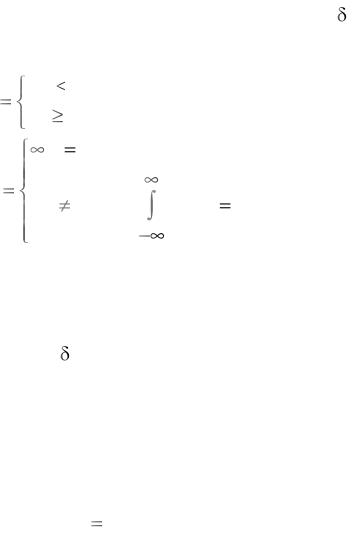
Для описания переходных режимов работы объектов и систем управления в технике используются специальные функции – переходные характеристики. Данные функции описывают реакцию системы на типовые, стандартные испытательные воздействия – единичное ступенчатое воздействие 1(t) и единичный импульс (t). Математическое описание этих воздействий имеет следующий вид:
1(t) |
0, t |
0; |
|
1, t |
0; |
|
|
|
|
||
|
, t |
0; |
|
δ (t) |
0, t |
0; и |
δ (t)dt 1. |
|
Реакция системы на единичное ступенчатое воздействие называется переходной функцией и обозначается h(t). Реакция системы на единичный импульс называется функцией веса и обозначается w(t). Очевидно, что воздействия 1(t) и (t) имеют конкретную физическую подоплеку на реальных объектах. Характеристики h(t) и w(t) могут быть получены экспериментальным путем, а также аналитически, путем решения соответствующего дифференциального уравнения для условий, соответствующих конкретному воздействию. Из определения типовых воздействий следует, что между ними существует взаимосвязь
δ (t) 1(t) (1) .
Из приведенного выше равенства видно, что и между переходными характеристиками также существует аналогичная зависимость
w(t) = h(1)(t).
10