Материал: А27819 Лазарев В.Л. Робастое управление
быть достигнуто за счет синтеза устройства управления, структура и параметры которого могут быть определены и рассчитаны с помощью инженерных методик.
Наиболее полным и практически реальным вариантом стационарного динамического режима является случайный режим. Стационарный детерминированный режим можно рассматривать как частный вариант случайного режима, когда случайные функции, описывающие воздействия, вырождаются в детерминированные функции. Физической подоплекой данного обстоятельства является то, что реальные воздействия, сигналы в любой системе имеют случайную составляющую. Если влияние этих составляющих невелико, то ими можно пренебречь и ограничиться рассмотрением детерминированного режима. Приведенные в начале этого подраздела примеры иллюстрируют данный тезис. Объективная оценка влияния отдельных случайных составляющих воздействий является необходимой предпосылкой для определения перечня контролируемых воздействий при синтезе системы управления. Дальнейшее повышение эффективности управления как естественный этап эволюции систем управления должно основываться на учете случайных составляющих воздействий, являющихся естественными аномалиями детерминированных режимов.
Синтез системы управления при наличии случайных воздействий является наиболее сложной задачей относительно рассмотренных выше вариантов. Зачастую, особенно при наличии ограниченной информации о воздействиях, точное аналитическое решение такой задачи не представляется возможным. Поэтому возникает задача синтеза робастных систем, обеспечивающих «хорошее» качество управления (в разумных пределах) даже в условиях относительного «информационного вакуума». Рассмотрению методов синтеза таких систем для наиболее характерных случаев и ситуаций с исходными данными посвящен излагаемый далее материал. В любом случае, для решения подобных задач необходимо математическое описание случайных воздействий. Математический аппарат для таких исследований разработан в теории вероятностей. В следующем разделе приводятся основные положения данной теории, необходимые для решения задач анализа и синтеза систем управления, с конкретными иллюстрациями и пояснениями.
26

2. ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЙ
2.1. Основные положения
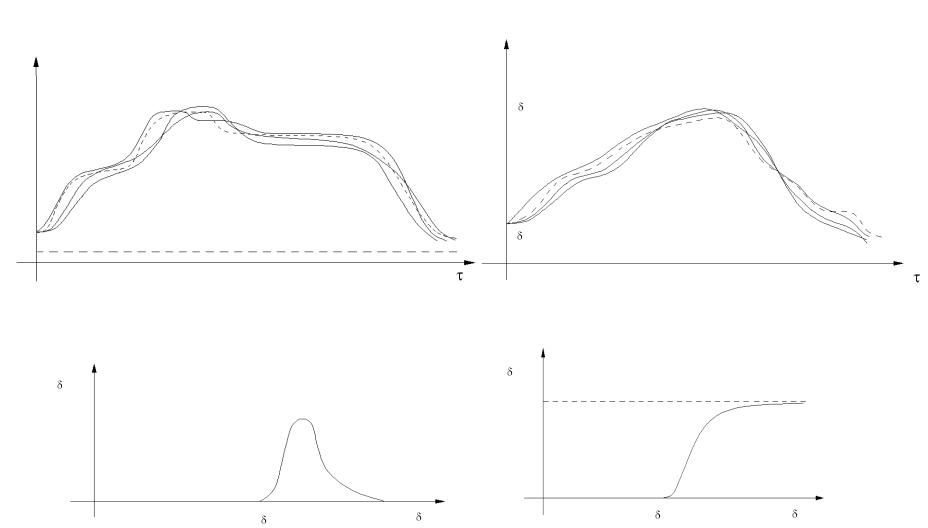
Как отмечалось в разд. 1, практически любой реальный режим работы объекта или протекания технологического процесса происходит при наличии случайных воздействий. Подоплека этого обстоятельства отражена в известном тезисе о том, что случайность – закономерна. В ряде случаев, когда доля случайных составляющих воздействий относительно невелика, для упрощения решаемых задач анализа работы объекта управления, синтеза технологий и управления этим обстоятельством пренебрегают. Наличие случайных воздействий на входе приводит к появлению случайной составляющей в выходных координатах. А это, в свою очередь, приводит к вариации фазовых траекторий технологических режимов, что, в конечном счете, отразится на изменении свойств выпускаемой продукции. На рис. 2.1 данное обстоятельство проиллюстрировано на примере работы термоагрегата для термообработки вареных колбас. На рис. 2.1, а приведена характеристика семейства кривых изменений температуры энергоносителя (паровоздушной смеси) в агрегате при обработке колбас одного типа во времени. Разброс кривых изменения температуры во времени обработки обусловлен проявлением таких случайных воздействий, как изменение давления пара, подаваемого в паровой калорифер, а также изменением температуры воздуха как снаружи термоагрегата, так и подаваемого в калорифер, и др. Горизонтальные участки кривых соответствуют основным стадиям технологической обработки: подсушке, обжарке, варке и охлаждению. Штриховой линией обозначен «идеальный» температурный режим, который должен иметь место при отсутствии случайных воздействий. На рис. 2.1, б приведен характерный вид семейства кривых изменения температуры в центре колбасного батона в процессе термообработки tб – одного из важнейших показателей качества продукции, характеризующего уровень стерилизации продукта. Ввиду особой важности этого показателя в действующих стандартах введено специальное ограничение по величине максимального значения температуры в центре батона в процессе термообработ-
ки tб max, т. е. tб max tб.кр. Значение tб.кр задается специальной технологической инструкцией, обычно принимают tб.кр = 72 С. Разброс кривых
27

на рис. 2.1, в обусловлен наличием рассмотренных выше случайных воздействий, искажающих температурный режим, а также проявлением других случайных воздействий, например, изменением теплофизических характеристик колбасного фарша вследствие некоторой нестабильности его химического состава, особенно по таким параметрам, как содержание жира, белка, влаги и др.
Как результат влияния различных возмущающих воздействий на выходную координату процесса тепловой обработки tб max на рис. 2.1, в приведен характерный вид кривой плотности распределения этого показателя р (tб max) для кондиционной продукции. Положительная асимметрия (Sk  0) приведенного закона распределения объясняется специфическими особенностями организации управления процессом термообработки. С одной стороны, требуется обеспечить выполнение необходимого условия производства кондиционной продукции: tб max tб.кр. С другой стороны, значительное превышение величины tб.кр приводит или к перерасходу энергии, или к снижению производительности агрегата (за счет увеличения длительности термообработки), что в конечном итоге ведет к увеличению себестоимости продукции. Для недопущения этого в современных термоагрегатах имеются специальные системы блокировки подачи энергоносителя и оповещения обслуживающего персонала о необходимости прерывания процесса термообработки в случае, когда значение разности tб max – tб.кр превысит некоторое установленное значение кр. Этим и объясняется невысокая вероятность появления больших величин в производственных условиях.
0) приведенного закона распределения объясняется специфическими особенностями организации управления процессом термообработки. С одной стороны, требуется обеспечить выполнение необходимого условия производства кондиционной продукции: tб max tб.кр. С другой стороны, значительное превышение величины tб.кр приводит или к перерасходу энергии, или к снижению производительности агрегата (за счет увеличения длительности термообработки), что в конечном итоге ведет к увеличению себестоимости продукции. Для недопущения этого в современных термоагрегатах имеются специальные системы блокировки подачи энергоносителя и оповещения обслуживающего персонала о необходимости прерывания процесса термообработки в случае, когда значение разности tб max – tб.кр превысит некоторое установленное значение кр. Этим и объясняется невысокая вероятность появления больших величин в производственных условиях.
И, наконец, для полноты описания рассматриваемого явления на рис. 2.1, г приведен характерный вид интегрального закона распределения этого же показателя F (tб max).
Приведенный пример наглядно иллюстрирует необходимость наличия математического описания случайных воздействий и методов анализа влияния данных воздействий на состояние объектов. Ниже будут рассмотрены методы анализа воздействий и выбран перечень параметров для их характеристики.
28
а
t
tн tк
29 |
в |
|
P(t max)
б
t
t max
t н
г
F(t max)
t кр |
t |
max |
t |
кр |
t |
max |
|
|
|
Рис. 2.1. Характеристики работы термоагрегата при наличии случайных воздействий:
а – графики изменения температуры энергоносителя; б – графики изменения температуры в центре колбасного батона во время термообработки; в – характерный вид плотности распределения р(tб max); г – характерный вид интегрального
закона распределения F(tб max)
29
2.2. Случайные величины и случайные функции
Случайное воздействие в зависимости от характера его проявления с математической точки зрения может быть представлено либо случайной величиной, либо случайной функцией. Понятие случайной функции является более общим, чем случайная величина, так как в нем учитывается фактор времени. Образно говоря, случайная величина характеризует как бы «статику» случайного явления, а случайная функция – динамику. Или, другими словами, случайная функция есть случайная величина, проявляющаяся во времени. Изучением случайных величин и функций занимается специальная математическая дисциплина – теория вероятностей. Ниже излагаются некоторые ее положения, необходимые для понимания последующего материала.
2.3. Случайная величина и ее характеристики
Случайная величина – это величина, значение которой является непредсказуемым в диапазоне изменения факторов рассматриваемого явления. Наиболее полной характеристикой случайной величины х является ее закон распределения – интегральный F(x) и дифференциальный p(x).
Интегральным законом распределения случайной величины х называется функция F(x), описывающая вероятность Р появления случайной величины X, меньшей некоторого текущего значения переменной х, т. е.
F(x) = P (X х).
Из определения F(x) следует, что она является неубывающей функцией х для – х
х  . Причем F(– ) = 0 и F( ) = 1. Пример вида функции F(х) приведен на рис. 2.1, г.
. Причем F(– ) = 0 и F( ) = 1. Пример вида функции F(х) приведен на рис. 2.1, г.
Дифференциальным законом распределения или плотностью вероятности р(х) называется функция
p(x) dF (x) , dx
30