Материал: А27819 Лазарев В.Л. Робастое управление
щает процедуру построения и использования таких характеристик для решения различных задач.
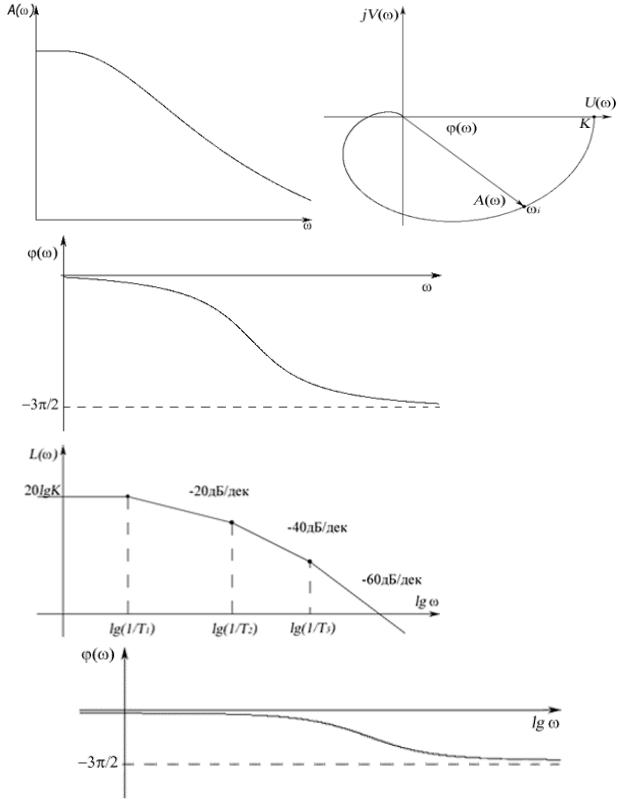
Качественный вид рассмотренных выше характеристик для инерционного звена 3-го порядка, имеющего, например, передаточ-
ную функцию вида W ( p) |
K |
, приведен на |
|
||
(T1 p 1) (T2 р 1) (T3 р 1) |
рис. 1.2, а–д (для определенности полагаем Т1 > Т2 > Т3).
Из приведенных рисунков видно, какую важную роль играют данные характеристики даже для такой частной задачи, как оценка влияния гармонических составляющих воздействия на выход объекта. Очевидно, что наибольшей информативностью в этом случае обладают АЧХ (рис. 1.2, а) и ЛАХ (рис. 1.2, г). Действительно, располагая по оси (или lg ) значения частот гармонических составляющих воздействия f(t) в соответствии с представлением (1.19), можно определить влияние каждой из составляющих на выходную величину объекта. Для комплексной оценки таких явлений в технике вводится специальное понятие – полоса пропускания, ширина которой характеризует инерционность объекта, его динамические свойства. Очевидно, что чем шире полоса пропускания, тем менее инерционен объект, и наоборот. Кроме этого оказывается, что с использованием частотных характеристик удобно решать задачи, связанные с оценкой качества переходных процессов, устойчивости, а также задачи анализа и синтеза систем управления.
Отклонение выходной величины y системы при наличии гармонического воздействия может быть оценено по амплитуде выход-
ного сигнала |
|
ymax f0 Ф fy ( jω) , |
(1.24) |
где Ф fy ( jω) – модуль частотной передаточной функции замкнутой
системы.
Для систем автоматического регулирования (САР), задачей которых является отслеживание входного сигнала – управляющего воздействия x3, в качестве выходной величины системы рассматривают величину ошибки (t)  y(t).
y(t).
21
а |
в |
б
г
д
Рис. 1.2. Качественный вид частотных характеристик инерционного звена 3-го порядка:
а – АЧХ; б – ФЧХ; в – АФЧХ; г – ЛАХ; д – ЛФХ
22
В данном случае выражение передаточной функции замкнутой системы по ошибке Фf (p) будет иметь вид
Ф f ( p) |
|
1 |
, |
(1.25) |
|
|
|||
|
W ( p) |
|||
1 |
|
|
||
где W(p) – передаточная функция разомкнутой системы.
Очевидно, что при наличии задающего воздействия, изменяющегося по гармоническому закону, ошибка слежения будет также изменяться по гармоническому закону с той же частотой, что и задающее воздействие. Тогда амплитуда ошибки слежения выходной величины y(t) за управляющим воздействием xз(t) согласно формулам (1.24) и (1.25) может быть определена из выражения
|
|
|
x0 |
|
|
. |
(1.26) |
max |
|
1 W (jω) |
|
|
|||
|
|
||||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Очевидно, что в системах регулирования |
величина |
||||||
ошибки max намного меньше величины x0, следовательно, знаменатель выражения (1.26) намного больше единицы. Поэтому выражение (1.26) можно упростить, приведя его к виду
|
|
|
x0 |
|
х0 |
. |
(1.27) |
max |
|
W (jω) |
|
A( ) |
|||
|
|
||||||
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Выражение (1.27) используется при решении задачи синтеза САР, обеспечивающих требуемую точность регулирования в установившемся режиме. Величины max и x0 задаются исходя из конкретной специфики работы системы в техническом задании на проектирование. Затем с помощью выражения (1.27) определяются требования к ЛАХ разомкнутой системы, обеспечивающие выполнение условия
max. |
(1.28) |
23
Очевидно, что для выполнения условия (1.28), ЛАХ синтезируемой системы должна проходить не ниже так называемой контроль-
ной точки Ак с координатами [lg 0; L( 0)] |
|
|
|
L( 0) 20lg A(ω ) 20lg |
x0 |
, |
(1.29) |
|
|||
0 |
|
|
|
|
max |
|
|
где 0 – частота управляющего воздействия.
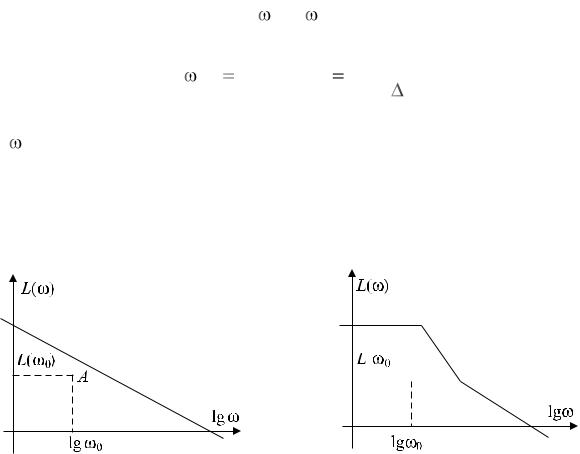
На рис. 1.3 приведены примеры ЛАХ, обеспечивающих строгое выполнение условия (1.28) (так как в обоих случаях ЛАХ проходит выше контрольной точки) для различных вариантов САР.
а б






 к
к
к
Рис. 1.3. Примеры ЛАХ разомкнутых САР, обеспечивающих выполнение требований по ограничению ошибки в установившемся режиме:
а – статическая система; б – астатическая система
Из выражения (1.27) также следует, что если ЛАХ разомкнутой САР проходит ниже контрольной точки Ак, то величина ошибки слежения будет превышать заданное допустимое значение, т. е. условие (1.28) не будет выполняться.
Применительно к задаче синтеза систем управления при работе в детерминированных динамических режимах необходимо отметить следующее. В настоящее время разработаны и широко используются на практике методы синтеза систем управления с использованием частотных характеристик. Не вдаваясь в отдельные детали, необходимо отметить концептуальную направленность таких методик. В качестве отправной точки используется математическое описание объекта управления и неварьируемой части системы управления, если такая
24
имеется. Далее, исходя из конкретной ситуации, формируются требования к качеству процесса управления. Чаще всего ими являются: требования к запасу устойчивости системы, ограничения по длительности переходного процесса (быстродействию), требования к точности управления в статическом или динамическом режимах. В последнем случае возможны различные варианты описания воздействия (например, воздействия, изменяющиеся с постоянной скоростью, ускорением и др.). Кроме того, в этот перечень могут быть включены требования к типу переходного процесса (апериодический или колебательный). При допустимости колебательного переходного процесса могут накладываться ограничения на величину перерегулирования или динамический заброс. Возможны и другие требования. На основании всех требований по известным методикам строится ЛАХ желаемой системы. Там же строится ЛАХ неварьируемой части системы. На основании этой информации определяется ЛАХ и соответствующее ей математическое описание варьируемой части системы, которая обычно реализуется в виде того или иного типа регулятора с соответствующими настройками либо в виде конкретной корректирующей цепи. Далее делается проверка правильности полученного решения путем построения переходного процесса в системе одним из известных методов. При необходимости дополнительной корректировки системы управления методика может быть повторена. Для удобства реализации отдельных компонентов таких методик в настоящее время разработаны специальные номограммы и компьютерные программы.
В качестве неварьируемой части системы обычно рассматриваются объект управления и первичные преобразователи и (или) исполнительные устройства, штатно установленные на нем. Если же они относятся к варьируемой части системы и имеются варианты их выбора, то это обстоятельство расширяет возможности синтеза системы управления.
На основании вышеизложенного материала можно сделать следующий обобщающий вывод. При наличии детерминированных воздействий изменение координат объекта или системы управления, динамика которых описывается с помощью линейных дифференциальных уравнений, может быть однозначно определено. При необходимости осуществления автоматического управления требуемое качество процесса управления для основных типов воздействий может
25