Материал: А27819 Лазарев В.Л. Робастое управление
ства практической реализации. В результате проведенного анализа состояния вопроса и поиска решений по описанию состояний неопределенности m-мерного вектора предлагается подход, базирующийся на введении понятия многомерного комплексного энтропийного потенциала (МКЭП). Оно основано на использовании ранее введенных понятий, является наглядным, компактным и удобным для практического применения.
Определение 3. Многомерным комплексным энтропийным потенциалом (МКЭП) m-мерного вектора называется величина Laz, определяемая из выражения
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
z |
|||
|
m |
|
|
|
|
z |
z |
m |
m |
|
Kei σi |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Lazi |
|
ci |
|
L i |
|
|
|
|
ci |
|
ei |
|
|
|
|
ci |
|
(8.39) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
i 1 |
|
|
|
|
i 1 |
|
X ni |
|
|
|
|
i 1 |
|
|
X ni |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
В определении (8.39) использованы следующие обозначения: |
|||||||||||||||||||||||||
L i – КЭП i-го параметра; |
|
ei – ЭП i-го параметра; ci – весовые коэф- |
|||||||||||||||||||||||
фициенты, характеризующие значимость, приоритет каждого i-го параметра при описании состояния системы, ci 0. Для удобства и однозначности выбора их целесообразно нормировать условием ci 1
(i)
(i = 1, 2, …, m); z – номер варианта критерия, z = 1 или z = 2 (при z = 1
|
|
|
|
|
m |
||
получаем |
вариант |
критерия La1= (ci |
L i |
) ; при z = 2 – вари- |
|||
|
|
|
|
|
i 1 |
||
|
|
|
|
|
|
|
|
|
|
m |
2 |
|
|
|
|
|
|
|
|
|
|
||
ант La2 = |
|
(ci |
L i |
) . |
|
|
|
i1
Вгеометрической интерпретации величина La2 является модулем или длиной m-мерного вектора, в состав которого входят величины комплексных энтропийных потенциалов отдельных параметров системы в масштабе их весовых коэффициентов. Величина La1 – сумма длин
модулей |
указанных составляющих. Поэтому имеет место усло- |
вие La1 |
La2 , причем равенство справедливо в случае, когда m = 1. Вы- |
бор варианта критерия является прерогативой пользователя. В основу выбора могут быть положены следующие соображения. Критерий La2 дает оценку состояния неопределенности менее зависимую от значения
166
величины размерности системы m, чем критерий La1. Поэтому при достаточно больших значениях величины m (m 5) предпочтительней является критерий La2. Возрастание величин Laz в обоих вариантах свидетельствует о повышении уровня неопределенности системы и наоборот. Во всех случаях величина Laz так же, как и величина L , является безразмерной, что позволяет использовать ее в качестве критерия энтропийного подобия при исследовании состояний неопределенности различных систем. Очевидно также, что при m = 1 величина Laz вырождается в модуль величины L . Достоинством введенного критерия МКЭП является то, что он основан на использовании введенных ранее понятий ЭП, поддается простому определению и допускает наглядную интерпретацию. Поэтому при определении величин Lazj на основании результатов эксперимента требуется минимальный объем данных. (Объем измерений, необходимый для определения величины МКЭП, будет равен сумме объемов отдельных измерений, необходимых для определения энтропийных потенциалов каждого из отдельных параметров.)
Критерий Laz является дальнейшим развитием базовых понятий теории энтропийных потенциалов и не противоречит ранее введенным и используемым понятиям. Так при переходе к одномерной системе, когда m=1, величина Laz вырождается в модуль величины L . Если базовое значение параметра Xn в конкретной ситуации постоянно, то величина L будет являться безразмерным масштабным изображением величины энтропийного потенциала параметра e. Если пренебречь еще и трансформацией закона распределения в процессах эволюции или управления системой, что соответствует условию Ke = const (т. е. считать, что закон распределения параметра всегда является неизменным, например, нормальным), то величина L j будет масштабным изображением величины СКО. В этом частном случае исследование состояний системы может быть осуществлено
будет являться безразмерным масштабным изображением величины энтропийного потенциала параметра e. Если пренебречь еще и трансформацией закона распределения в процессах эволюции или управления системой, что соответствует условию Ke = const (т. е. считать, что закон распределения параметра всегда является неизменным, например, нормальным), то величина L j будет масштабным изображением величины СКО. В этом частном случае исследование состояний системы может быть осуществлено
сиспользованием известных методов дисперсионного анализа.
Вдругом частном случае, когда Ke = const, а в качестве базового значения выбрана величина математического ожидания параметра,
т. е. Xn = mx, величина L j будет являться масштабным изображением коэффициента вариации приведенного параметра. Данный коэффициент также используется для характеристики вариативных свойств параметра.
167
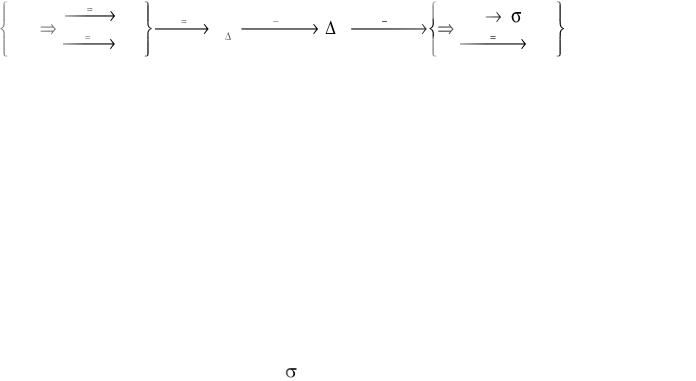
Таким образом, введенные понятия величин ЭП являются взаимосвязанными унифицированными «конструкциями», основанными на принципах «свертывания» или «вложения»: понятия более высокого уровня выражаются через величины энтропийных потенциалов предыдущих уровней. Такие выражения осуществляются при упрощении моделей ЭП путем исключения дополнительных характеристик неопределенности (варианта многопараметрической модели, базового значения, энтропийного коэффициента и др.). Схема преобразования моделей состояний неопределенности, основанных на использовании комплекса понятий ЭП различных уровней, изображена на рис. 8.7.
Laz
z |
1 |
La1 |
|
|
|
|
|
|
|
|
|
{ } |
|
||
|
|
m 1 |
{L } |
Xn |
const |
{ e |
} |
Ke const |
|
|
|||||
z |
2 |
La2 |
|
|
|
|
X |
n |
m |
x |
{Vx |
} |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 8.7. Схема преобразования моделей состояний неопределенности на основе комплекса понятий энтропийных потенциалов
Схема, изображенная на рис. 8.7, иллюстрирует процедуру перехода «сверху вниз», т. е. от более полных вариантов моделей к более простым. Очевидно, что также возможен переход и в обратном направлении за счет введения или учета вышеуказанных характеристик неопределенностей в модели нижних уровней.
Получаемые модели являются непротиворечивыми, компактными и удобными для практического применения. С их помощью удается описать состояния неопределенности различных объектов и систем единым комплексом, состоящим из трех наглядных информативных характеристик (Ke, Xn, ), учитывающих соответственно «дестабилизирующие» свойства законов распределения параметров, базовые значения, а также их характеристики рассеяния (СКО). Такие характеристики поддаются достаточно простому определению. В случаях, когда они определяются на основании результатов наблюдений, требуется минимальный объем данных, например, на порядок меньше, чем для определения энтропии.
Рассмотрим пример, иллюстрирующий использование понятий КЭП и МКЭП для организации мониторинга и управления работой объекта по нескольким параметрам [22].
168
Вкачестве объекта будем рассматривать климатическую камеру
вкомплекте с устройством управления, предназначенную для испытаний различной аппаратуры, механизмов, материалов, покрытий и др. Состояние такой системы для пользователя при проведении испытаний
характеризуется двумя параметрами (m = 2): температурой y1 (°C) и относительной влажностью воздуха y2 (%) в заданных точках контроля.
Для данного числа параметров (m 5) выбираем вариант критерия La1. Оба параметра одинаково значимы для проведения испытаний, поэтому весовые коэффициенты априори приняты равными: c1 = c2 = 1/2.
Поддержание температурно-влажностного режима в камере осуществляется с помощью соответствующих контуров регулирования, качество работы которых характеризуется значениями величин текущих отклонений параметров от базовых значений с соответствующими вероятностями (т. е. соответствующими законами распределения). Другими словами, качество работы контуров регулирования оказывает влияние на состояние неопределенности температурновлажностного режима камеры. Базовые значения параметров в каждом климатическом режиме являются уставками регуляторов.
На основании обработки результатов экспериментальных данных по регулированию параметров в одном из рабочих режимов были полу-
чены следующие характеристики. |
По |
температуре: |
Xn1 |
= |
40 |
oC; |
|||
Ke1 |
= 2,01; |
1 = 0,8 oC. По |
относительной влажности: Xn2 |
= |
85 |
%; |
|||
Ke2 |
= 1,8; |
2 = 1,7 %. Для данного режима величины комплексных эн- |
|||||||
тропийных |
потенциалов |
будут |
соответственно |
равны: |
L 1 |
= |
|||
= (2,01 0,8)/40 0,04; L 2 = (1,8 1,7)/85 |
0,036. Состояние неопределен- |
||||||||
ности данного температурно-влажностного режима в рассматриваемой системе определяем с помощью величины многомерного комплексного энтропийного потенциала La1 = (1/2)L 1 + (1/2)L 2 = 0,038. С целью повышения качества поддержания температурно-влажностного режима была проведена коррекция обоих контуров регулирования путем изменения настроек регуляторов. Здесь необходимо отметить следующие обстоятельства. Например, для системы регулирования, основанной на использовании промышленного ПИД-регулятора, настроечными параметрами являются: k – коэффициент передачи регулятора; T1 – время предварения; T2 – постоянная интегрирования. Используя такие настройки, можно решать различные задачи по управлению процессом регулирования: изменять запас устойчивости системы, а также вид
169
и показатели качества процесса регулирования (например, получать апериодический или колебательный переходный процесс, изменять величины перерегулирования, ошибок и др.). В частности, если управление процессом регулирования осуществлять по величине комплексного энтропийного потенциала L , то, изменяя величины k, T1 и T2, будем изменять передаточную функцию регулятора и, следовательно, всего контура регулирования. В результате будут изменяться динамические свойства системы, ее частотная характеристика и степень влияния различных возмущений на регулируемый параметр. Это приведет к изменению спектрального состава динамической составляющей регулируемого параметра и закона распределения величин его отклонений от уставного или базового значения. В конечном счете в различных пропорциях или соотношениях изменятся величины и Ke, а следовательно, и величины энтропийного потенциала и комплексного энтропийного потенциала. В результате изменятся динамические свойства системы и условия прохождения возмущающих воздействий на ее выход. В скорректированном варианте системы регулирования характеристики параметров получились следующими. По температуре: Xn1 = 40 oC; Ke1 = 1,95; 1 = 0,5 oC. По относительной влажности: Xn2 = 85 %; Ke2 = 1,92; 2 = 1,2 %. Величины комплексных энтропийных потенциалов будут соответственно равны: L 1 = (1,95 0,5)/40 0,024; L 2 = (1,92 1,2)/85 0,027. Состояние неопределенности температурно-влажностного режима в данной ситуации характеризуется новым значением величины La1 0,026. Из приведенных данных видно, что в результате реализации таких действий состояние неопределенности системы по рассматриваемым параметрам y1 и y2 уменьшилось, или, другими словами, возросло качество поддержания температурно-влажностного режима. Рассмотренный цикл изменения настроечных параметров регулятора можно трактовать как этап итеративной процедуры синтеза системы управления по методу минимизации энтропийного потенциала. При этом существует множество алгоритмов и планов поиска решений [1].
В приведенном примере состояние системы по выбранным параметрам рассматривается в заданных точках с учетом их изменения во времени в процессе регулирования. Аналогичным образом можно контролировать состояние системы в пространстве, т. е. в объеме камеры. В таком случае необходимо рассматривать распределение значений параметров y1 и y2 в разных точках объема камеры, обуслов-
170