Материал: А27819 Лазарев В.Л. Робастое управление

так и путем изменения параметров, настроек отдельных звеньев исходной системы. Очевидно, что в результате любого вида коррекции будет осуществлено целенаправленное изменение частотной характеристики или связанной с ней передаточной функции системы. Теперь можно сформулировать варианты задачи синтеза системы управления.
Частным, но довольно часто встречающимся вариантом является задача синтеза системы управления с жестко заданной структурой, однако имеется возможность варьирования параметрами отдельных элементов, звеньев. На производстве в качестве таких звеньев обычно используются регуляторы, с помощью которых решаются задачи регулирования конкретных технологических параметров. С учетом этого обстоятельства данная частная задача синтеза сводится к определению настроек регулятора, обеспечивающих выполнение условия (6.14) при наличии стационарных случайных воздействий. Количество таких настроек зависит от типа закона регулирования. Так, например, при использовании пропорционально-интегрально- дифференциального (ПИД) закона регулирования соответствующая передаточная функция регулятора будет иметь вид
W ( p) kp 1 |
1 |
Tп р , |
(6.15) |
||
|
|
||||
Tи p |
|||||
|
|
|
|||
где kp – коэффициент передачи; Tи – постоянная интегрирования; Тп – время предварения.
Указанные три параметра являются настройками регулятора. В общем случае варьируемые параметры могут быть и в других звеньях системы. Так, например, при установке датчика температуры на объекте в защитной гильзе в зависимости от вида наполнителя (минеральное масло, различные металлические опилки и др.) будет изменяться соответствующая постоянная времени. Или, например, существуют возможности проведения модернизации, переналадки объекта или другого технологического оборудования, позволяющие изменять их параметры. Для аналитического решения такой частной задачи синтеза системы на основании информации о характеристиках случайных воздействий и структуры системы с использованием выражений (6.11)–(6.13) устанавливается зависимость дисперсии выходной величины от варьируемых настроечных параметров системы Аi, например, в виде
D |
y |
F ( A ), i I. |
(6.16) |
|
i |
|
106
Тогда значения варьируемых параметров Аi, обеспечивающих минимизацию дисперсии выходной величины, находятся из условия равенства нулю частных производных (условия нахождения экстремума функции F)
F ( Ai ) |
0, i I . |
(6.17) |
|
Ai |
|||
|
|
Решая систему уравнений (6.17), определяют искомые значения параметров Аi. Если зависимость (6.16) не удается получить в явном виде, или, например, она в силу громоздкости и сложности системы аппроксимируется набором различных зависимостей для отдельных диапазонов измерения переменных, то для нахождения минимума дисперсии Dy используются различные итеративные методы поиска экстремума функций. Среди множества таких методов можно выделить следующие, получившие широкое распространение в инженерной практике: метод градиента, метод наискорейшего спуска, метод Гаусса–Зейделя, метод случайного поиска и др. Для эффективного использования данных методов на практике разработаны пакеты прикладных программ для ЭВМ, которые получили распространение и являются доступными широкому кругу пользователей. И, наконец, в лабораторных или производственных условиях при наличии пилотной установки или при возможности проведения экспериментов на работающей системе, отыскание оптимальных значений варьируемых параметров системы управления в реально-возможных ограниченных диапазонах варьирования может быть осуществлено методами пассивного и особенно активного экспериментов. При проведении пассивного эксперимента оптимальные значения настроечных варьируемых параметров Аi синтезируемой системы определяются в результате длительного наблюдения за поведением работающей системы при различных вариантах настройки этих параметров. Затем на основании полученной информации создается математическая модель зависимости вида (6.16) для получения экстремального решения или в простейшем случае – из имеющихся вариантов выбирается лучший, обеспечивающий минимальное значение величины Dy. Очевидно, что точность получаемого решения, степень его приближения к искомой точке экстремума будут зависеть от количества апробированных
107
вариантов настроек и, в конечном счете, от длительности эксперимента. Наоборот, при проведении активного эксперимента поиск оптимального решения – значений настроечных параметров – осуществляется в результате пошагового, целенаправленного изменения этих параметров с последующим анализом результатов изменения величины Dy, после чего разрабатывается последующая стратегия изменения параметров и так далее, пока не будет найдено решение. Для проведения активного эксперимента предварительно разрабатывается его план, в котором с учетом специфики задачи описываются порядок выполнения шагов, степень дробления параметров и др. Использование методов активного эксперимента позволяет быстрее и эффективнее решать поставленную задачу. Однако в условиях массового производства при использовании высокопроизводительного оборудования такая активная переналадка параметров системы управления, особенно на начальной стадии эксперимента, чревата появлением больших партий брака, ограничивающих применение этого метода на производстве. Подробно методики планирования эксперимента рассмотрены в специальной литературе, например в работе [8].
Другой вариант формулировки задачи синтеза системы обусловлен ситуацией, когда возможности конструирования позволяют варьировать не только параметрами настройки отдельных блоков, но и изменять структуру системы, в частности, за счет введения в контур системы специальных корректирующих звеньев. В этом варианте решение задачи осуществляется через отыскание оптимальной передаточной функции системы, обеспечивающей минимизацию величины дисперсии Dy, с последующим определением ее структуры и вариантов реализации отдельных блоков и звеньев коррекции. Общий план решения такой задачи с использованием частотных характеристик состоит из следующих основных этапов:
1)определяются структура и состав неизменяемой или неварьируемой части системы исходя из конкретных условий (технических, производственных и др.);
2)определяется частотная характеристика неварьируемой части системы;
3)по известным характеристикам воздействий с помощью выражений (6.11)–(6.13) определяется значение дисперсии выходной величины системы Dy;
108
4)определяются частотная характеристика варьируемой части системы, обеспечивающая выполнение условия (6.14), и соответствующая ей передаточная функция;
5)выбираются структура и набор технических средств для практической реализации, определенной в п. 4 передаточной функции.
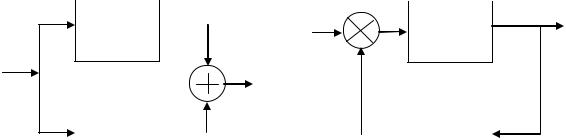
Следует отметить, что одна и та же передаточная функция может быть получена на аппаратном уровне различными вариантами реализации варьируемой части системы. Так, например, желаемая коррекция свойств системы может быть достигнута как путем последовательного включения в контур системы специальных корректирующих звеньев, так и за счет введения локальных корректирующих обратных связей для отдельных элементов системы или за счет использования параллельных корректирующих звеньев. Причем в зависимости от конкретной ситуации каждый из таких вариантов может иметь свои преимущества. Наличие эквивалентности различных вариантов структур коррекции можно проиллюстрировать на примере сравнения параллельной коррекции и коррекции с помощью отрицательной обратной связи, схемы которых приведены на рис. 6.2.
На рисунке приняты следующие обозначения: W0 (p) – передаточная функция корректируемого объекта; Wк.п (p) – передаточная функция параллельного корректирующего звена; Wк.o.с (p) – передаточная функция корректирующего звена в цепи обратной связи.
а |
|
|
|
б |
|
W0(p) |
|
||||
|
|
|
|
W0(p) |
|
|
|
|
–
Wк.п (p) |
|
|
|
Wк.o.c (p) |
|
||||
|
|
|
||
|
|
|
|
|
Рис. 6.2. Схемы различных вариантов коррекции:
а– параллельное включение корректирующего звена; б – коррекция
спомощью отрицательной обратной связи
109
Для установления условий эквивалентности обоих вариантов коррекции приравняем соответствующие передаточные функции скорректированных систем
W0 (p) Wк.п |
(p) |
|
W0 (p) |
|
. |
(6.18) |
1 W0 |
(p) Wк.о.с |
|
||||
|
|
(p) |
|
|||
Последовательно решая уравнение (6.18) относительно Wк.п (p) (p), получаем условия эквивалентности обоих вариантов кор-
рекции относительно друг друга
|
|
|
W 2 |
(p) W |
(p) |
|
|
|
Wк.п |
(p) |
|
0 |
к.о.с |
|
; |
(6.19) |
|
1 W0 (p) Wк.о.с (p) |
||||||||
|
|
|
|
|||||
Wк.о.с (p) |
|
|
|
Wк.п (p) |
|
. |
(6.20) |
W 2 |
(p) |
W (p) W |
(p) |
||||
|
0 |
|
0 к.п |
|
|
|
|
Выражения (6.19) и (6.20) описывают взаимосвязь между передаточными функциями корректирующих звеньев для каждого варианта коррекции с обеспечением эквивалентности динамических свойств системы. Аналогично можно вывести условия эквивалентности и для других вариантов коррекции.
Анализируя этапы решения задачи синтеза системы с варьируемой структурой, приходим к выводу, что определение частотной характеристики и соответствующей ей передаточной функции варьируемой части может быть осуществлено различными вариантами. При этом отправным моментом такого решения является понятие оптимальной передаточной функции системы, обеспечивающей минимум дисперсии выходной величины Dy. Проиллюстрируем вышеизложенное. Используя правила структурных преобразований, возмущение f (см. рис. 6.1) перенесем на вход системы, т. е. в точку приложения задающего воздействия xз. Тогда с учетом некоррелированности воздействий x и f можем считать
Dy Dy(x) Dy( f ) , |
(6.21) |
где Dy(x) , Dy( f ) – составляющие дисперсии выходной величины, обусловленные наличием соответствующих воздействий.
110