Материал: А27819 Лазарев В.Л. Робастое управление
задачи синтеза системы учитывать, что отдельные требования могут противоречить друг другу, а это обусловливает необходимость поиска компромисса.
Кроме требований или ограничений, предъявляемых к различным параметрам системы в виде, например, условий типа (6.1)–(6.5), для синтеза систем зачастую необходимо также задаться критерием оптимальности или целевой функцией. В общем случае критерий оптимальности L задается интегральным функционалом вида
|
tp |
|
|
|
|
|
|
L |
(X , Y ) dt, |
(6.6) |
|||||
|
0 |
|
|
|
|
|
|
|
|
|
|||||
где tр – время функционирования или работы системы; X |
– вектор |
||||||
входных параметров системы; Y – вектор выходных параметров системы.
Выбор функции ( X ,Y ) осуществляется разработчиком в зависимости от конкретных условий и требований производства и обусловливает тип системы управления.
В частности, когда ( X ,Y ) = 1, исходный функционал (6.6) принимает вид
|
tp |
|
L |
dt tp . |
(6.7) |
|
0 |
|
Осуществляя минимизацию данного функционала, т. е. налагая условие
L tp |
min, |
(6.8) |
получаем оптимальную по быстродействию систему, т. е. обеспечивающую минимальное время управления.
Если функция ( X ,Y ) содержит только выходную координату объекта, то критерий оптимальности может быть трансформирован в соответствующий интегральный критерий качества переходного процесса, используя который можно оптимизировать динамические свойства системы. Так, например, минимизируя интегральный критерий качества переходного процесса в виде
101
|
tp |
|
d y(t) |
2 |
|
|
|
L |
2 |
(t) c |
|
dt |
min, |
(6.9) |
|
y |
dt |
||||||
|
|
|
|
|
|||
|
0 |
|
|
|
|
||
|
|
|
|
|
|
удается получить вариант системы с ограниченной длительностью и колебательностью или степенью «турбулентности» переходного процесса. В выражении (6.9) y(t) y( ) y(t) – текущее отклонение выходной величины объекта от установившегося значения y( ) , с – весовой коэффициент, характеризующий значимость, относительный «вес» динамической составляющей переходного процесса в общей оценке его качества. Варьируя величиной с в процессе решения задачи синтеза, можно получить систему с различными динамическими характеристиками.
Кроме того, варьируя выражением ( X ,Y ) и размерностью переменных x и y, можно выбрать критерий оптимизации, позволяющий синтезировать варианты систем управления, оптимизирующих качество продукции, энергопотребление и др. Наиболее общим вариантом критерия оптимальности, позволяющим учитывать многообразие различных требований к свойствам синтезируемой системы, является аддитивный интегральный функционал от квадратичных форм по рассматриваемым параметрам и характеристикам систем, например, вида
tp |
|
|
|
|
|
|
|
|
|
|
L |
[ c {x |
x (t)}2 |
c |
{y |
j 0 |
y |
j |
(t)}2 |
] dt, i I , j J , |
(6.10) |
|
i i 0 |
i |
j |
|
|
|
|
|
||
0 |
(i) |
|
(j ) |
|
|
|
|
|
|
|
где сi, сj – весовые коэффициенты, характеризующие значимость, относительный «вес» i-й характеристики или j-го параметра синтезируемой системы.
Достоинством такого варианта критерия оптимальности является то, что с его использованием возможно отыскание компромисса при наличии противоречивых требований к синтезируемой системе. Варьируя величинами сi и cj можно описать приоритет каждого тре-
бования, а с |
помощью набора реперных значений парамет- |
ров xi0 и y j0 (i |
I, j J ) задать некий «идеал», к которому необхо- |
димо приблизиться в процессе синтеза. Очевидно, что при такой постановке вопроса процедура оптимизации сведется к отысканию
102
минимального значения функционала L. Существуют и другие варианты критерия оптимальности.
Для оптимизации процесса управления при наличии случайных воздействий могут использоваться так называемые вероятностные критерии оптимальности. В этом случае осуществляется синтез системы управления, обеспечивающей, например, минимум вероятности наступления каких-либо нежелательных событий или ситуаций. В качестве таких событий могут рассматриваться различные промахи при управлении летательными аппаратами или недопустимые отклонения от цели, потери сигналов и др. Применительно к биотехнологической промышленности вероятностные критерии оптимальности используются для управления материальными транспортными потоками, работой складов, экспедиций. В этих случаях, например, управление потоками продукции, поступающей на склад или отгружаемой со склада, осуществляется таким образом, чтобы минимизировать вероятность попадания заявки на загрузку или выгрузку партии продукции в очередь или минимизировать вероятность среднего времени ожидания в очереди такой заявки на обслуживание, тем самым уменьшить потери от простоя транспортных средств. Однако для организации управления технологическими процессами и объектами биотехнологической промышленности такие критерии широкого распространения не получили.
Вреальных условиях многообразие требований, предъявляемых
ксистеме управления с учетом их специфики и разнообразия, зачастую не позволяет осуществить строгую математическую формулировку критерия оптимальности для синтезируемой системы. Вследствие этого не представляется возможным аналитическое решение задачи синтеза классическими математическими методами. Поэтому на практике для решения таких задач используют итеративную процедуру, где на каждом цикле итерации осуществляется частичный синтез системы, направленный на выполнение отдельных исходных требований, начиная при этом с важнейших, первостепенных. Если существует набор таких первостепенных требований, то, реализуя итеративную процедуру синтеза, начиная с каждого требования отдельно, можно получить несколько вариантов системы. Затем в результате сравнительного анализа выбирают наиболее приемлемый вариант.
103
Применительно к рассматриваемому классу систем, работающих при наличии стационарных случайных воздействий, первостепенным является обеспечение требуемой точности, например, в виде условий (6.4) и (6.5). Следует отметить, что условие (6.5) более удобно для описания «точностных» характеристик при наличии неполной априорной информации о свойствах системы, так как позволяет оценить доверительный интервал отклонения (ошибки) по заданной доверительной вероятности или для заданной величины отклонения оценить вероятность появления такого события. Более точная оценка величин доверительного интервала или доверительной вероятности может быть получена при наличии информации о виде закона распределения выходной величины. Однако даже при отсутствии такой информации, исходя из предположения, что закон распределения выходной величины является нормальным, получим мажорантные, завышенные в энтропийном смысле значения оценок этих величин. Таким образом, на практике основным требованием при синтезе систем, работающих при наличии случайных воздействий, является ограничение дисперсии выходной величины.
6.3. Синтез систем управления при наличии случайных воздействий
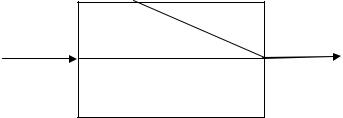
В общем случае считаем, что система управления находится под действием случайного воздействия (помехи, возмущения) f и задающего воздействия xз (рис. 6.1).
 f
f
|
Фf (p) |
|
xз |
y |
|
|
Фx(p) |
|
|
|
Рис. 6.1. Схема системы управления при наличии случайных воздействий
104
На рис. 6.1 Фf (р) – передаточная функция замкнутой системы для случайного воздействия; Фx(р) – передаточная функция замкнутой системы для задающего воздействия. Также считаем, что характеристики воздействий – корреляционные функции или спектральные плотности – известны. Как правило, данные характеристики определяются одним из методов, рассмотренных в разд. 5, на предварительных этапах. Тогда, используя выражение (3.13), можно получить выражение для спектральной плотности центрированной выходной величины y для случая взаимно независимых воздействий в виде
S |
у |
( ) |
|
Ф |
f |
(j |
) |
|
2 S |
f |
( ) |
|
Ф (j |
) |
|
2 S |
x |
( ). |
(6.11) |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для достаточно редкого на практике случая, когда воздействия x и f коррелированы, выражение для спектральной плотности Sy( ) будет иметь вид
S y ( ) Ф f ( j ) 2 S f ( ) Фx ( j ) 2 Sx ( ) |
|
Фf ( j )Фx ( j )Sxf ( ) Фx ( j )Фf ( j )S fx ( ), |
(6.12) |
где Sxf ( ), Sfx( ) – взаимные спектральные плотности задающего воздействия и помехи.
Используя выражение для спектральной плотности выходной величины, определяем дисперсию выходной величины системы согласно формуле (3.7) для каждого конкретного варианта
Dy |
2 |
2 Sy ( ) d . |
(6.13) |
y |
|||
|
|
0 |
|
Задача синтеза системы в данном случае сводится к коррекции свойств системы, при которой выполняется условие
Dy Dy доп , |
(6.14) |
– предельно допустимое значение дисперсии.
Коррекция свойств системы, в конечном счете, может быть достигнута как путем изменения структуры системы управления или введения в контур системы дополнительных или корректирующих звеньев,
105