Материал: А27819 Лазарев В.Л. Робастое управление
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 3.1 |
||||||
№ |
Наименование зве- |
Уравнение |
Выражения для вычисления коэффициентов статистической линеаризации |
|||||||||||||||||||||||||||||
пп. |
на и его статическая |
звена |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
характеристика |
у = F(х) |
|
|
|
|
|
kc0 |
|
|
|
|
|
|
|
|
|
kc1 |
|
|
|
|
|
kc1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3 |
Звено |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
B |
|
|
|
|
1 m1 |
|
|
B |
1 |
|
kс0 |
(m1 |
|
|
1) |
|
|
|
|
|
|
||||||||
|
с насыщением |
|
|
(1 m1)Ф |
(1 |
m1) |
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
m |
|
|
|
σ |
|
|
B |
2 |
σ1 |
B |
|
|
1 m |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
y |
|
|
|
x |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 m1 |
|
|
1 m1 |
b |
|
1 |
|
|
||||||||
|
B |
|
|
|
Ф 1 |
m1 |
|
|
|
|
1 1 m |
Ф |
|
Ф |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
-b |
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
В |
|
|
1 |
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
Ф 1 |
m1 |
|
|
|||||||||
|
b |
x |
К = |
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
m |
2 |
|
|
|
|
|
|||||
|
-B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1 |
|
m1 ) e |
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
m |
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
m1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
61 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1 |
|
m ) e |
2 |
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
mx , |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
m |
|
1 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1 |
|
b |
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4 |
Двухпозиционное |
|
|
B |
|
|
1 |
m |
|
|
1 |
m |
|
|
|
|
|
|
|
|
|
1 |
|
B |
|
1 |
1 |
2 |
||||
|
|
|
|
|
|
|
|
B |
|
|
|
2 |
2 |
2 |
|
|
m1 |
|||||||||||||||
|
реле с зоной не- |
|
|
|
Ф |
|
Ф |
|
|
|
|
|
|
|
e 2 |
|
|
|||||||||||||||
|
|
|
mx |
|
|
1 |
|
|
1 |
|
|
1 |
kс0mx |
|
|
|
2π |
|
|
1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
B2 |
|
|
|
|
|
|
|
|
||||||
|
чувствительности |
|
|
|
|
1 |
|
|
|
|
|
|
|
x |
|
|
|
|
|
x |
|
|
|
|
||||||||
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
m |
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 m1 |
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
B |
|
|
|
|
|
x , |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
2 |
1 |
|
|
||||
|
|
|
|
|
|
1 |
|
b |
|
|
1 |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
-b |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
61 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Теперь с учетом выражения (3.35) реакция системы на неслучайную составляющую воздействия mf = const определяется из уравнения статического режима
|
|
|
W fz (0) |
|
|
|
|
|
|||
mz m f Ф0 ( p) |
|
р 0 m f |
|
. |
(3.37) |
|
1 kс0 (mx , x )W (0) |
||||
|
|
||||
Влияние же центрированной случайной составляющей воздей-
0
ствия f ( t ) на выходной параметр z может быть оценено величиной
дисперсии Dz |
|
2 |
в соответствии с выражениями (3.6), (3.7), (3.36) |
|||||||||||||||||||||||
|
|
|
z |
|||||||||||||||||||||||
2 |
1 |
|
|
Ф1( j ) |
|
2 |
S f ( ) d |
|
1 |
|
|
A1 |
( ) |
|
2 |
S f |
( ) d |
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
z |
|
0 |
|
|
|
|
|
0 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
|
Wfz (j |
) |
|
|
|
2 |
S f ( |
|
|
) d |
. |
(3.38) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0 |
1 kс1 (mx , |
x )W (j ) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Если в качестве выходной величины системы рассматривать сигнал x(t), который поступает на вход нелинейного звена, то выражения (3.35) и (3.36) для передаточных функций замкнутой системы
0
по параметрам mf и f (t) примут вид
Ф0 |
(р) |
|
WfzW1 (p) |
|
; |
(3.39) |
|||
1 |
kс0 W (p) |
||||||||
|
|
|
|
|
|||||
|
|
Wfz |
(р)W1 (p) |
|
|||||
Ф1 |
(р) |
|
|
|
|
|
. |
(3.40) |
|
1 |
kс1 W (p) |
|
|||||||
|
|
|
|
|
|||||
Тогда с учетом этого выражение (3.37) примет вид
mx mf Ф0 (p) |
|
p 0 mf |
Wfz (0)W1 (0) |
, |
(3.41) |
||||
|
|||||||||
|
1 k |
с0 |
(m , |
x |
)W (0) |
||||
|
|
|
|
||||||
|
|
|
|
x |
|
|
|
||
62
а выражение (3.38) соответственно трансформируется к виду
2 |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
Ф1 |
(j ) |
|
S f ( ) d |
|
|
||||||||||
|
|
|
х |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
Wfz (j )W1 |
(j ) |
|
|
|
(3.42) |
|||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
S f |
( )d . |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
1 kс1 (mx , |
x ) W (j ) |
|||||||||||||
|
|
|
|
|
|
|||||||||||
Уравнения (3.41) и (3.42) в общем случае содержат две искомые переменные (mx, х) и являются нелинейными. Поэтому они должны решаться совместно. Система уравнений такого типа решается либо графически, либо методом последовательных приближений. Блок-схема алгоритма нахождения решения таких уравнений методом последовательных приближений с краткими комментариями приведена на рис. 3.5.
Методика графического решения уравнений (3.41) и (3.42) в данной ситуации очевидна.
Полученные в результате решения значения коэффициентов статистической линеаризации kc0 и kc1 могут быть использованы для проведения дальнейших исследований нелинейной системы, например, для определения таких же статистических характеристик m и  других параметров на выходе отдельных звеньев, входящих в контур системы управления, как, например, для варианта, описываемого вы-
других параметров на выходе отдельных звеньев, входящих в контур системы управления, как, например, для варианта, описываемого вы-
ражениями (3.37) и (3.38).
Для иллюстрации изложенного материала рассмотрим пример. Имеется релейная система автоматического регулирования, структурная схема которой приведена на рис. 3.6. На вход системы поступает стационарное случайное воздействие f(t), которое имеет следующие характеристики: математическое ожидание mf = 0, корреляци-
онную функцию K |
f |
( ) |
2e |
|
|
|
, где |
0,1; |
f |
1. |
Система харак- |
|
|
||||||||||
|
|
f |
|
|
|
||||||
теризуется следующими параметрами: k = 2, B = 5. Требуется определить дисперсию сигнала на входе нелинейного элемента – 2х .
63
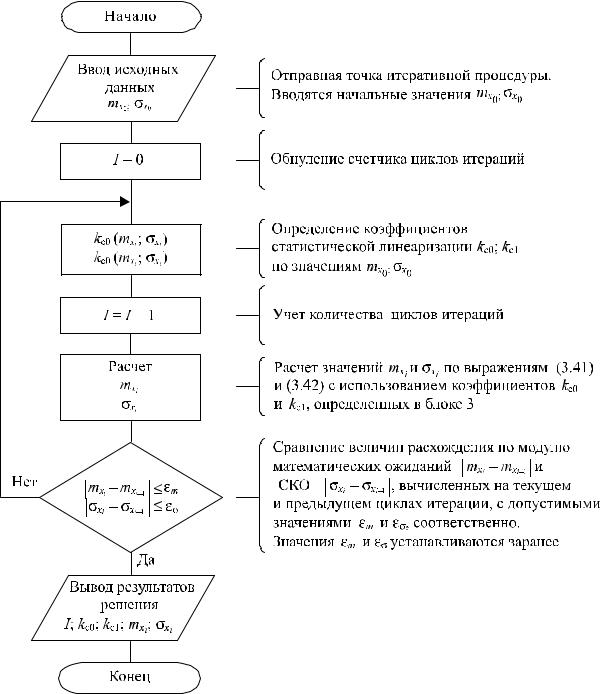
Рис. 3.5. Блок-схема алгоритма решения уравнений методом последовательных приближений
64
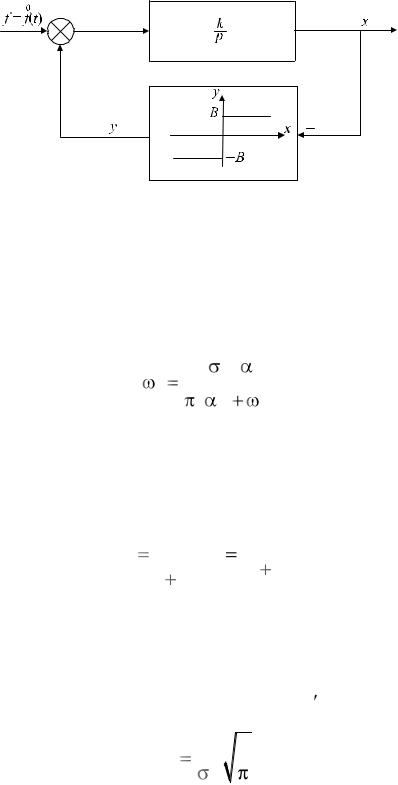
Рис. 3.6. Схема релейной системы автоматического регулирования
Решение Выражение для спектральной плотности, соответствующее дан-
ной корреляционной функции, согласно выражениям (2.21) и (3.38) будет иметь вид
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
S f |
( ) |
|
|
|
|
|
|
f |
|
|
. |
|
(3.43) |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
2 ) |
|
|||||||||
|
( |
|
|
|
||||||||||
Определим передаточную функцию системы для центрирован- |
||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ной случайной составляющей f (t) |
|
|
|
|
|
|
|
|
||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
Фfx (p) |
|
|
|
p |
|
|
|
|
, |
(3.44) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
k |
|
|
p kс1k |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
1 kс1 |
p |
|
|
||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где kc1 – коэффициент статистической линеаризации.
Определим коэффициент kc1, осуществив статистическую линеаризацию релейной характеристики. Для данного частного случая зна-
чение kc1 можно определить из выражения для kс1 |
(см. табл. 3.1, п. 1) |
||||||
|
|
|
|
|
|
|
|
kс1 |
B |
|
|
2 |
. |
(3.45) |
|
|
|
||||||
|
x |
|
|||||
Найдем выражение для спектральной плотности параметра х в соответствии с выражением (3.6)
65