Материал: А27819 Лазарев В.Л. Робастое управление
kс0 |
my |
. |
(3.25) |
|
mx |
||||
|
|
|
Выразим my через параметры звена и входного воздействия x(t)
mу M[ y (t)] M[F{x (t)}] F(x) p (x) dx . |
(3.26) |
Подставляя выражение (3.26) в формулу (3.25), окончательно получаем
kс0 |
1 |
F(x) p (x) dx. |
(3.27) |
|
|
||||
mx |
||||
|
|
|
Выражение для kс1 находим из условия, что рассматриваемое звено осуществляет преобразование центрированных составляющих входного и выходного сигналов, т. е.
0 |
0 |
|
y (t) |
kс1 x (t). |
(3.28) |
Теперь, переходя к дисперсиям случайных функций, получаем
Dy k с21 Dx , |
(3.29) |
или
kс1 |
Dy |
|
y |
. |
(3.30) |
Dx |
|
x |
|||
|
|
|
|
Выразим y через параметры звена и входного воздействия x(t)
σ y 
 Dy
Dy 
 M[( y my )2 ]
M[( y my )2 ] 
 M[ y2 2my y my ]2
M[ y2 2my y my ]2

 M[y2 ] 2my M[y] mу2
M[y2 ] 2my M[y] mу2 
 M[y2 ] 2mу2 mу2
M[y2 ] 2mу2 mу2
M [ y2 ] m2у |
F 2 (x) p (x) dx m2у . |
(3.31) |
56
Подставляем полученный результат (3.31) в выражение (3.30) и окончательно имеем
k |
|
|
1 |
F 2 (x)p (x) dx m2 . |
(3.32) |
|
|
|
|||
с1 |
|
||||
|
|
у |
|
||
|
|
|
x |
|
|
Коэффициенты kс0 |
и kс1 называются коэффициентами статисти- |
||||
ческой линеаризации. Как видно из выражений (3.27) и (3.32), значения коэффициентов определяются характеристиками нелинейного звена y = F(x) и законом распределения входного воздействия p(x). Используя указанные выражения, можно рассчитать значения коэффициентов статистической линеаризации.
Cтатистическую линеаризацию нелинейного звена можно осуществить также исходя и из другого условия, отличного от (3.23) и (3.24). Это условие заключается в минимизации среднеквадратического отклонения функций y (t) и y(t). Другими словами, исходное нелинейное звено заменяется линейным, обеспечивающим минимум выражения,
[y (t) y (t)]2 p (y) dy min. (3.33)
-
Известно, что условие (3.33) может быть выполнено, если структура эквивалентного линейного звена будет такой же, как и в первом случае (см. рис. 3.4). Причем значение первого коэффициента статистической линеаризации kс0 остается прежним в соответствии с выражением (3.27). Второй коэффициент статистической линеаризации kс1 определяется из выражения
определяется из выражения
|
kyx (0) |
|
M [y (t) x (t)] |
F (x) xp (x) dx |
|
|||
kс1 |
|
|
. |
(3.34) |
||||
|
|
|
|
|
|
|||
Dx |
|
Dx |
|
|||||
|
|
Dx |
|
|||||
Как видно из выражения (3.34), |
значение kс1 так |
же, как |
||||||
и в предыдущем случае, определяется характеристикой нелинейного звена F(x) и законом распределения входного воздействия.
57

Иногда для повышения точности расчетов в качестве указанного коэффициента берется среднее арифметическое значение коэффициентов, полученных из выражений (3.32) и (3.34). Очевидно, что вычисление коэффициентов статистической линеаризации по исходным формулам (3.27), (3.32) и (3.34) в каждом конкретном случае решаемой задачи является довольно трудоемкой процедурой. К этому следует добавить трудозатраты, связанные с определением законов распределения случайных воздействий. Данные обстоятельства затрудняют практическую реализацию метода статистической линеаризации в исходном «классическом» виде. Поэтому для упрощения процедуры решения задач, связанных с анализом и синтезом нелинейных систем, значения коэффициентов kс0, kс1 и kс1 определены в соответствии с вышеприведенными зависимостями для ряда типовых нелинейностей, которые встречаются на практике, и для нормального закона распределения воздействий. Эти результаты представлены в специальных справочных материалах, где априори принимается допущение, что дифференциальный закон распределения величины х или плотность вероятности данной величины описывается выражением
определены в соответствии с вышеприведенными зависимостями для ряда типовых нелинейностей, которые встречаются на практике, и для нормального закона распределения воздействий. Эти результаты представлены в специальных справочных материалах, где априори принимается допущение, что дифференциальный закон распределения величины х или плотность вероятности данной величины описывается выражением
|
|
|
|
|
|
( x mx )2 |
|
|
|
|
1 |
|
|
|
2 |
2 |
|
p(x) |
|
|
|
|
e |
х |
. |
|
|
|
|
|
|
|
|||
x |
|
2π |
|
|
||||
|
|
|
|
|
|
|
|
|
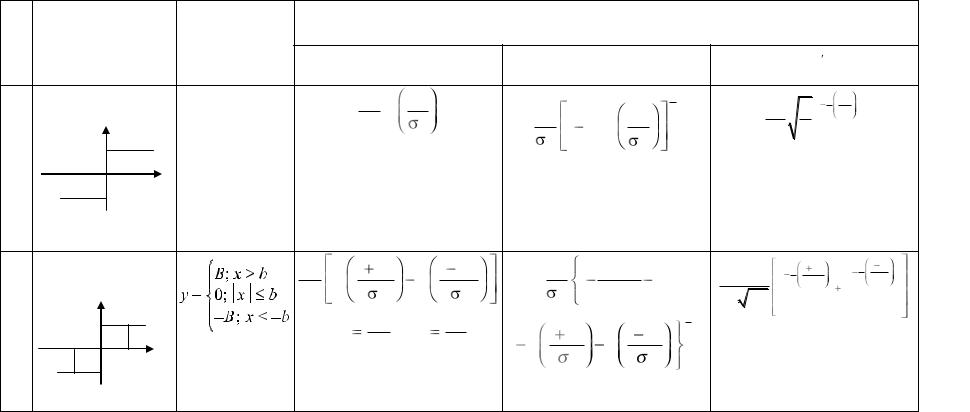
Такое допущение основано на том, что нормальный закон распределения случайных воздействий имеет наибольшее распространение в природе и технике, что объясняется центральной предельной теоремой. В этом смысле нормальный закон является «предельным» законом, к которому стремятся другие законы распределения при равнозначности отдельных факторов, определяющих каждую из реализаций воздействия. В случае, если реальный закон распределения воздействий отличается от нормального, то это обстоятельство может стать причиной дополнительной погрешности. Однако при этом, как показывает опыт, величины коэффициентов kс0, kс1 и kс1 варьируются незначительно. Значения коэффициентов статистической линеаризации для типовых нелинейностей, используемых для организации позиционного управления на практике, приведены в табл. 3.1. В случае, когда статическая характеристика нелинейного звена y = F(х) неоднозначна, т. е. для определения выходной величины y помимо значения
варьируются незначительно. Значения коэффициентов статистической линеаризации для типовых нелинейностей, используемых для организации позиционного управления на практике, приведены в табл. 3.1. В случае, когда статическая характеристика нелинейного звена y = F(х) неоднозначна, т. е. для определения выходной величины y помимо значения
58
входной величины x необходимо также задаться значением ее производной x(1), например, характеристика двухпозиционного реле с зоной нечувствительности, формулы (3.27), (3.32) и (3.34) требуют уточнения с учетом значения величины x(1). В таких случаях определение коэффициентов статистической линеаризации осуществляется по известным уточненным формулам. Для решения же практических задач обычно пользуются уже готовыми выражениями для данных коэффициентов, полученными из формул, как, например, в п. 4 табл. 3.1.
После определения коэффициентов статистической линеаризации kc0 и kc1 методика исследования влияния случайного воздействия на нелинейную систему будет состоять в следующем.
Исходная нелинейная система описывается двумя передаточными функциями
Ф0 |
(p) |
|
Wfz |
(p) |
|
; |
(3.35) |
||
1 kс0 W (p) |
|
||||||||
|
|
|
|
|
|
||||
Ф1 |
(p) |
|
Wfz |
(p) |
, |
(3.36) |
|||
1 kс1W (p) |
|||||||||
|
|
|
|
|
|
||||
где Ф0(р) – передаточная функция замкнутой системы для неслучайной (детерминированной) составляющей воздействия; Ф1(р) – передаточная функция замкнутой системы для центрированной случайной составляющей воздействия; Wfz(p) – передаточная функция участка системы «воздействие f – выходная величина z»; W(p) – передаточная функция линейной части системы W(p) = W0(p) W1(p).
Необходимо отметить, что проведенная таким образом линеаризация позволяет формально «спрятать» нелинейные свойства звена в выражения коэффициентов kc0 и kc1, которые нелинейно зависят от па-
раметров воздействия mx и х, т. е. kc0 = kc0 (mx, x) и kc1 = kc1 (mx, x). Это следует из выражений (3.27), (3.32) и (3.34) и наглядно проиллюстриро-
|
|
1 |
|
z |
|
t |
2 |
вано в табл. 3.1. (В табл. 3.1 использована функция Ф(z) = |
|
|
|
e 2 |
dt, |
||
|
|
|
|
||||
|
|
|
|
||||
2 |
0 |
||
|
|
|
|
которая называется интегралом вероятностей; t = |
x |
.) |
|
|
|
||
|
x |
|
|
59
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.1 |
||
|
|
Коэффициенты статистической линеаризации типовых нелинейных позиционных звеньев |
|
|
|
|
|
|
|||||||||||||||||||||||
№ |
Наименование |
Уравнение |
|
|
Выражения для вычисления коэффициентов статистической линеаризации |
|
|||||||||||||||||||||||||
пп. |
звена и его |
звена |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
статическая |
у = F(х) |
|
|
|
|
|
kc0 |
|
|
|
|
|
|
|
|
|
kc1 |
|
|
|
|
|
kc1 |
|
|
|
|
|||
|
характеристика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
Двухпозиционное |
y = Bsignx |
|
|
|
2B |
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
||
|
|
|
Ф |
x |
|
|
|
B |
|
|
|
|
m |
|
2 |
|
B |
2 |
|
mx |
|
|
|||||||||
|
реле |
|
|
|
|
|
|
|
|
|
|
|
|
|
4Ф2 |
|
|
e |
2 |
σx |
|
|
|||||||||
|
y |
|
|
|
|
m |
|
|
|
|
|
|
1 |
|
x |
|
σ x |
π |
|
|
|||||||||||
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Трехпозиционное |
|
B |
|
1 |
m |
|
|
|
1 m |
|
|
B |
|
|
|
k 2 m2 |
|
|
|
|
1 |
m1 |
2 |
1 |
1 m |
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
1 |
|
|||||||||||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
реле |
|
|
|
|
Ф |
|
|
1 |
|
Ф |
|
|
|
|
1 |
c0 |
x |
|
|
e 2 |
σ1 |
|
e 2 |
σ1 |
|
|||||
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
B2 |
|
|
|
|
|
||||||||||||
|
|
y |
|
x |
|
|
1 |
|
|
|
1 |
|
|
x |
|
|
|
|
σx |
2π |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
mx |
|
|
|
σ x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
-b |
|
|
|
m |
; σ |
|
|
|
1 m |
|
|
1 m |
2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
b |
|
1 |
b |
|
Ф |
|
|
1 |
|
Ф |
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
b x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
-B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|