Материал: Lysenko_physics_lek_2
рівнянню &x&+ bx = 0 (де b > 0 ), можна стверджувати, що ця величина змінюється з часом за гармонічним законом, причому корінь із b дає кругову частоту коливань.
4 Зміна енергії при гармонічному коливанні. Визначимо силу F , що діє на тіло масою m , яке виконує гармонічні коливання. Відповідно до другого закону Ньютона проекція сили на вісь X дорівнює Fx = m&x&. Скориставшись співвідношенням (25.9),
отримаємо, що
F |
= -mw2 x = -kx , |
(25.10) |
x |
0 |
|
де |
|
|
|
k = mw2 . |
(25.11) |
|
0 |
|
Таким чином, сила пропорційна зміщенню. Знак мінус означає, що напрями сили й зміщення протилежні. Умові (25.10) задовольняє сила пружності. Тому сили, що мають вигляд (25.10),
незалежно від їх природи називають квазіпружними.
Квазіпружна сила обумовлює наявність у тіла потенціальної енергії
W |
p |
= |
kx2 |
= |
kA2 |
cos2 (w t + a). |
(25.12) |
|||||
|
|
|
||||||||||
|
|
|
|
2 |
|
2 |
|
|
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|||
Кінетична енергія тіла |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
2 |
|
2 |
|
2 |
|
|
|||
W = |
mx |
|
= mA |
w0 |
sin2 (w t + a). |
(25.13) |
||||||
|
|
|||||||||||
k |
|
2 |
|
|
2 |
|
|
0 |
|
|||
|
|
|
|
|
|
|
|
|||||
Як відомо, повна енергія системи дорівнює сумі потенціальної та кінетичної енергій. Склавши вирази (25.12) і (25.13) і взявши до уваги рівність (25.11), отримуємо для повної енергії системи вираз
W =W +W |
p |
= mA2w02 |
(cos2 (w t + a)+ sin2 |
(w t + a))= mA2w02 |
×1 = kA2 |
= const |
. (25.14) |
|
k |
2 |
0 |
0 |
2 |
2 |
|
||
|
|
|
|
|
|
|||
Таким чином, у процесі коливань повна енергія системи залишається постійною, відбувається перетворення кінетичної енергії в потенціальну й навпаки.
§ 26 Періоди коливань фізичного, математичного та пружинного маятників [5]
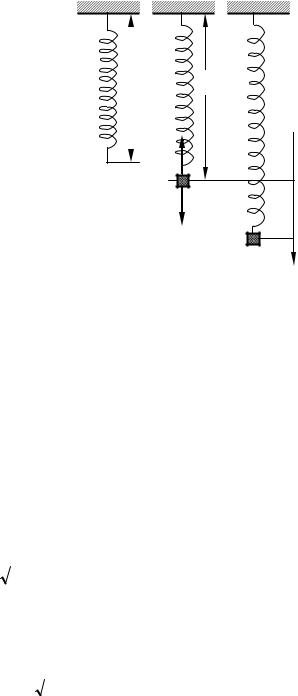
1 Пружинний маятник. Пружинним маятником називається система, що складається з тіла маси m , яке підвішене на невагомій пружині жорсткості k (рис. 26.1).
У стані рівноваги сила тяжіння mg , яка діє на тіло масою m , врівноважується пружною силою kDl0 :
mg = kDl0 , |
(26.1) |
де Dl0 – видовження пружини. Будемо характеризувати зміщення тіла від положення
рівноваги координатою x , причому вісь X направимо вертикально вниз, а нуль осі розмістимо у положенні рівноваги (див. рис. 26.1). Якщо змістити тіло в положення, яке характеризується координатою x , то видовження пружини стане дорівнювати Dl0 + x і
проекція на вісь X результуючої сили, що діє на тіло, набуде значення
Fx = mg - k(Dl0 + x). |
|
Врахувавши умову (26.1), отримаємо, що |
|
Fx = -kx . |
(26.2) |
Отже, результуюча сили тяжіння й пружної сили має характер квазіпружної сили. |
|
56
Змістимо тіло на відстань x = A від положення рівноваги і відпустимо. Під дією квазіпружної сили тіло почне рухатися у напрямку положення рівноваги з усе зростаючою швидкістю x& . При цьому потенціальна енергія системи буде зменшуватись, але натомість з'явиться все зростаюча кінетична енергія
Wk = mx&2 / 2 (масою пружини нехтуємо). Пройшовши
через положення рівноваги, тіло буде рухатися далі за інерцією. Цей рух припиниться тоді, коли кінетична енергія повністю перетвориться в потенціальну, тобто коли зміщення тіла стане дорівнювати (−A) . Потім такі ж перетворення енергії
будуть відбуватися при русі тіла у зворотному напрямку. Якщо тертя в системі відсутнє, енергія системи повинна зберігатися, й тіло буде рухатися в межах від x = A до x = −A необмежено довго.
Знайдемо рівняння, яке описує рух тіла у пружинному маятнику. Для цього використаємо рівняння другого закону Ньютона з урахуванням (26.2) і отримаємо
m&x& = −kx ,
або
l0 |
|
l0 + l0 |
k |
l0 |
|
|
|
0 |
|
mg |
x |
|
|
X
Рисунок 26.1 – Пружинний маятник: l0 – довжина недеформованої
пружини; l0 – видовження
пружини, що відповідає положенню рівноваги; x – зміщення кульки від положення рівноваги
|
(26.3) |
x + (k / m)x = 0 |
|
&& |
|
(k / m)> 0 . Ми прийшли до диференціального рівняння гармонічних коливань. Відомо, що розв’язком цього рівняння є функція
|
|
|
|
|
|
|
|
|
x = Acos(ω0t + α) |
, |
(26.4) |
||||
де циклічна частота |
|
||||||
|
|
|
|
|
|
|
|
|
|
ω0 = |
|
|
. |
|
|
|
k / m |
(26.5а) |
|||||
Таким чином, тіло буде виконувати |
гармонічні коливання відносно положення |
|||||
рівноваги, які описуються співвідношенням |
(26.4). Частота цих коливань визначається |
|||||
(26.5а) і буде тим більша, чим більша жорсткість пружини k |
й чим менша маса тіла m . |
|||||
Період коливань пружинного маятника можна знайти, використовуючи формулу (26.5а), |
||||||
|
|
|
|
|
|
|
|
T = 2π / ω0 = 2π |
|
|
. |
|
|
m / k |
(26.5б) |
|||||
2 Математичний маятник. Математичним маятником називають систему, яка складається з невагомої нитки, що не розтягується, до якої підвішене тіло, яке можна вважати матеріальною точкою. Досить гарним наближенням математичного маятника є невелика важка кулька, яка підвішена на довгій тонкій нитці.
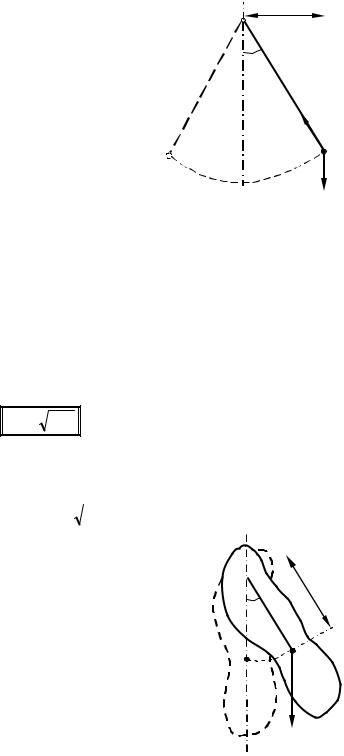
Відхилення маятника від положення рівноваги природно характеризувати кутом ϕ , який утворює нитка з вертикаллю (рис. 26.2). Тіло рухається під дією сили тяжіння mg та
сили натягу нитки Fн . При відхиленні маятника від положення рівноваги на кут ϕ виникає момент сили тяжіння відносно осі обертання O , модуль якого дорівнює mgl sin ϕ ( m – маса, а l – довжина маятника, l sin ϕ – плече сили mg ). Плече сили натягу нитки при цьому дорівнює нулю тому, що лінія сили Fн проходить через точку обертання O . Звідси випливає,
що і момент сили натягу нитки також дорівнює нулю. Таким чином, результуючий момент сил визначається моментом сили тяжіння. Дія моменту сил спрямована так, щоб повернути
57
маятник у положення рівноваги. Подібне відбувається і у випадку квазіпружної сили. Через це результуючому моменту M й кутовому зміщенню ϕ потрібно приписувати протилежні
знаки. Отже, вираз для результуючого моменту сили, що діє на математичний маятник, має вигляд
|
|
|
|
|
M = −mgl sin ϕ . |
|
|
|
(26.6) |
|||||
Використаємо для маятника рівняння динаміки |
O |
l sin ϕ |
|
|
|
|||||||||
|
|
|||||||||||||
обертального руху Iβ = M . Позначивши кутове прискорення |
|
|
|
|
|
|||||||||
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
через β = ϕ , і, врахувавши, що момент інерції матеріальної |
|
|
|
|
|
|
||||||||
точки дорівнює I = ml2 , отримуємо співвідношення |
|
|
ϕ |
l |
|
|
|
|||||||
|
ml |
2 |
&& |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ϕ = −mgl sin ϕ, |
|
|
|
|
|
|
|
|||||
яке можна звести до вигляду |
|
|
|
|
|
|
|
|||||||
&& |
|
|
|
|
(26.7) |
|
|
F |
|
|
|
|||
|
ϕ + (g / l)sin ϕ = 0 . |
|
|
н |
|
|
|
|||||||
У випадку малих коливань ϕ << 1 і sin ϕ ≈ ϕ. Тоді рівняння |
|
|
|
|
|
mg |
||||||||
(26.7) набере вигляду |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Рисунок 26.2 – Математич- |
|||||||||
|
|
|
|
|
. |
|
(26.8) |
|||||||
|
|
&& |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ϕ + (g / l)ϕ = 0 |
|
ний маятник: l sin ϕ – плече |
||||||||||
Таким чином, ми знову прийшли до диференціального |
||||||||||||||
сили mg ; |
плече |
сили |
Fн |
|||||||||||
рівняння гармонічних коливань. Його розв’язком є функція |
||||||||||||||
дорівнює |
нулю |
тому, |
що |
|||||||||||
|
|
|
|
|
|
|
|
|||||||
|
ϕ = ϕm cos(ω0t + α) |
, |
(26.9) |
|||||||||||
|
лінія сили Fн проходить |
|||||||||||||
де ϕm – амплітуда коливань (найбільший кут, на |
який |
|||||||||||||
через точку обертання O |
||||||||||||||
відхиляється маятник від положення рівноваги). Отже, при малих коливаннях кутове відхилення математичного маятника змінюється з часом за гармонічним законом.
З порівняння рівнянь (26.8) і рівняння гармонічних коливань отримуємо для циклічної
частоти математичного маятника вираз |
|
ω0 = g / l , |
(26.10) |
з якого випливає, що частота коливань математичного маятника залежить тільки від довжини маятника й прискорення вільного падіння й не залежить від маси маятника. Період коливань математичного маятника буде дорівнювати
T = 2π / ω0 = 2π |
|
|
. |
|
l / g |
(26.11) |
Чим довший маятник, тим повільніше він коливається.
3 Фізичний маятник. Фізичним маятником
називається тверде тіло, що може обертатися під дією сили тяжіння відносно нерухомої осі, що не проходить через центр тяжіння тіла. При відхиленні маятника від положення рівноваги на кут ϕ виникає момент сили, що прагне повернути
маятник у положення рівноваги. Цей момент дорівнює
M = −mgl sin ϕ , |
(26.12) |
де m – маса маятника, а l – відстань від точки підвісу |
O до |
центра мас маятника C (рис. 26.3). Знак мінус пов’язаний з тим, що момент сили діє так, щоб повернути тверде тіло у положення рівноваги.
Позначивши момент інерції маятника відносно осі, що проходить через точку підвісу O , через I , можна написати
&& |
(26.13) |
Iϕ = −mgl sin ϕ . |
O l
l
ϕ
C
mg
Рисунок 26.3 – Фізичний маятник: l – відстань від точки підвісу до центра мас C
58
У випадку малих коливань ( ϕ << 1 , sin ϕ ≈ ϕ) рівняння (26.13) переходить у диференціальне рівняння гармонічних коливань:
|
|
&& |
2 |
ϕ = 0 |
, |
|
(26.14) |
||
|
|
|
|
|
|||||
|
|
ϕ + ω0 |
|
||||||
де |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||||
|
ω0 = |
|
|
|
|
. |
|
||
mgl / I |
(26.15) |
||||||||
З формул (26.14) і (26.15) випливає, що при малих відхиленнях від положення рівноваги фізичний маятник виконує гармонічні коливання, частота яких залежить від маси маятника, моменту інерції маятника відносно осі підвісу й відстані від точки O підвісу до центра мас C маятника. Використовуючи (26.15) неважко знайти період коливань фізичного маятника:
T = 2π / ω0 = 2π |
|
|
. |
|
I / mgl |
(26.16) |
За теоремою Штейнера момент інерції маятника I може бути поданий у вигляді
I = IC + ml2 ,
де IC – момент інерції відносно осі, яка паралельна осі підвісу й проходить через центр мас C . Тоді циклічна частота (26.15) й період коливань (26.16) можуть бути подані у вигляді
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = |
|
|
|
|
|
T = 2π |
|
|
|
|
|
|
mgl /(I |
C |
+ ml2 ) |
, |
(I |
C |
+ ml2 )/(mgl) |
. |
(26.17) |
||||
0 |
|
|
|
|
|
|
|
|||||
§ 27 Електричний коливальний контур. Частота коливань [5]
1 При розгляді електричних коливань ми маємо справу зі струмами, що змінюються у часі. Закон Ома й правила Кірхгофа були встановлені для постійного струму. Однак вони залишаються справедливими й для миттєвих значень змінних струмів і напруг, якщо тільки їх зміни відбуваються не занадто швидко. Електромагнітні збурювання поширюються вздовж електричного кола з величезною швидкістю, що дорівнює швидкості світла c . Якщо за час t = l / c ( l – довжина кола, c – швидкість світла), який необхідний для передачі збурення в найвіддаленішу точку кола, сила змінного струму майже не змінюється, то миттєві значення сили струму у всіх перерізах кола можна вважати однаковими. Струми, що задовольняють таку умову, називаються квазістаціонарними. Для періодично змінних струмів умова квазістаціонарності має вигляд

 t = l / c << T
t = l / c << T 
 ,
,
де T – період коливальних процесів. Миттєві значення квазістаціонарних струмів задовольняють закон Ома. Отже, для них справедливі й правила Кірхгофа. При вивченні електричних коливань ми будемо припускати, що розглянуті нами струми є квазістаціонарними.
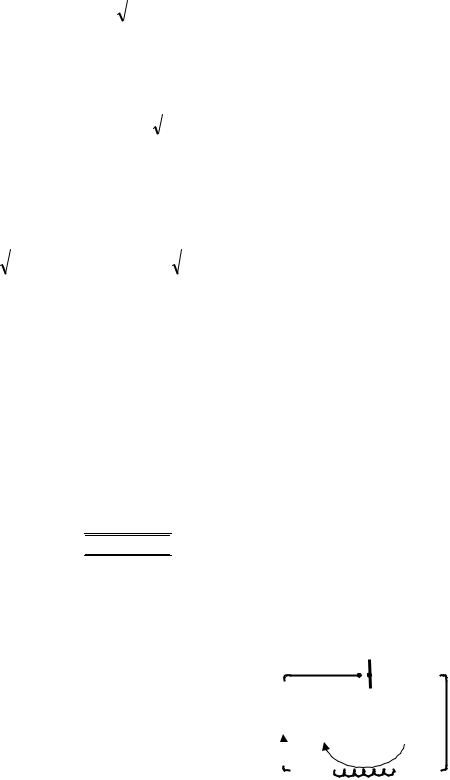
2 Коливальним контуром називається |
коло, що |
|
|
+ q |
|
C |
|
|||
складається з котушки з індуктивністю L і конденсатора з |
|
|
|
|
− q |
|
||||
|
|
|
|
|
||||||
ємністю C . |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
||||
|
|
|
|
|
||||||
Знайдемо рівняння коливань у контурі, в якому опір |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
дорівнює нулю ( R = 0 ). Застосуємо закон Ома для ділянки кола |
|
|
|
|
|
|
|
|
|
|
1-3-2 (див. рис. 27.1): |
|
|
|
I |
3 |
|
|
|
||
IR = ϕ1 − ϕ2 + Es . |
(27.1) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
Різницю потенціалів на конденсаторі визначимо із |
|
|
|
|
L |
|
||||
співвідношення |
|
|
|
Рисунок 27.1 |
|
|||||
ϕ1 − ϕ2 = q1 / C = (− q)/ C . |
(27.2) |
|
|
|
|
|
|
|
|
|
59 |
|
|
|
|
|
|
|
|
|
|
Тут використали, що заряд пластини конденсатора 1 q1 = −q (див. рис. 27.1).
Сила струму I є додатною, коли напрям струму співпадає з напрямом обходу ділянки кола 1-3-2, тобто за годинниковою стрілкою. В цьому разі заряд на пластині конденсатора q2 = q пов’язаний з силою струму в ділянці кола наступним співвідношенням
|
|
I = +dq / dt = +q . |
(27.3) |
||||||
& |
|
|
= q збільшується ( q > 0 ). |
||||||
Знак «+» обумовлений тим, що, коли струм I є додатним, заряд q2 |
|||||||||
|
|
|
|
|
|
|
|
|
& |
Підставимо в (27.1) закон самоіндукції Es = −L dI / dt , співвідношення (27.2) й (27.3), |
|||||||||
умову R = 0 й отримуємо |
(27.4) |
||||||||
|
|
0 = −q / C − L q . |
|||||||
&& |
|
|
|
||||||
Далі, виконавши прості перетворення, прийдемо до диференціального рівняння |
|||||||||
гармонічних коливань |
|
||||||||
|
|
|
|
|
|
|
. |
|
(27.3) |
|
|
q + (1/(LC))q = 0 |
|
||||||
|
|
&& |
|
|
|
|
|
|
|
Таким чином, заряд на обкладках конденсатора змінюється за гармонічним законом |
|||||||||
|
|
|
|
|
|
|
|
||
|
q = qm cos(ω0t + α) |
|
(27.4) |
||||||
с частотою |
|
||||||||
|
|
|
|
|
|
|
|
||
|
|
|
ω0 = 1/ |
|
|
. |
|
||
|
|
LC |
(27.5) |
||||||
Ця частота називається власною частотою контуру. Для періоду коливань знаходимо так звану формулу Томсона:
T = 2π |
|
|
. |
|
LC |
(27.6) |
Зрозуміло, що напруга на конденсаторі та сила струму в коливальному контурі також змінюються за гармонічним законом.
§ 28 Векторна діаграма. Додавання двох гармонічних коливань одного напрямку й частоти [5]
1 Розгляд багатьох питань, зокрема додавання декількох гармонічних коливань одного напрямку й однакової частоти, значно полегшується й стає наочним, якщо зображувати коливання графічно у вигляді векторів на площині. Схема, в якій коливання зображуються графічно у вигляді векторів на площині, називається векторною діаграмою.
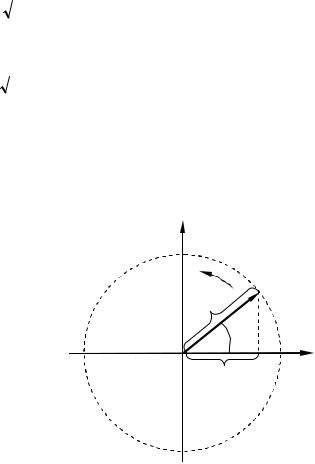
Візьмемо вісь X , уздовж якої будемо відкладати коливальну величину x (рис. 28.1). З узятої на осі точки O відкладемо вектор довжиною A , що утворює із віссю X кут α . Якщо обертати цей вектор з кутовою швидкістю ω0 відносно точки O , то
Y
ω0
A
αX
O x
проекція кінця вектора A на |
вісь X |
буде |
Рисунок 28.1 – Векторна діаграма |
||
змінюватись за законом |
|
|
|||
|
|
гармонічного |
коливання |
з |
|
x = Acos(ω t + α) . |
|
(28.1) |
|||
0 |
|
|
амплітудою A й початковою фазою |
||
Таким чином, гармонічне |
коливання |
може |
α |
|
|
бути заданим за допомогою вектора, довжина якого дорівнює амплітуді коливання, а напрям утворює з віссю X кут, що дорівнює початковій фазі коливань. Схема, яка зображена на рис. 28.1, є векторною діаграмою гармонічного коливання (28.1).
60