Материал: LS-Sb90926
ние почти всегда сопряжено со значительным увеличением времени нагрева, что нецелесообразно. Эта задача не имеет собственного практического значения, если не предусматривать в конструкции нагревателя специальных мер по защите поверхности нагреваемых тел. Вторая задача на максимум точности нагрева также чрезмерно академична и не имеет прикладного значения, хотя ей и посвящено большое количество работ.
Таким образом, наиболее актуальной является первая задача – максимального быстродействия, к тому же при ее решении, как правило, автоматически решается третья задача, т. е. обеспечивается минимальный расход электроэнергии. Рассмотрим данную задачу подробнее.
Время нагрева заготовки tн = tн ( p0 (t ), q0 (t ), f (t )) является функциона-
лом от законов изменения удельной мощности, тепловых потерь и частоты тока. Возможно трехканальное управление:
а) управление частотой тока (практически не используется);
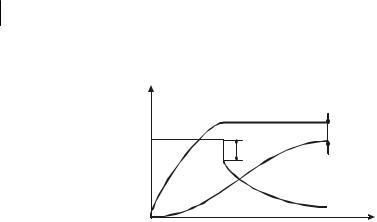
б) управление удельной мощностью тепловых потерь. Значение q0 нарастает к концу нагрева и существенно влияет на температурное поле. Влияние это двоякое. С ростом q0 распределение температуры по сечению
утрачивает монотонность |
и приобретает |
максимум (рис. 2.1): |
Tп < Tmax , |
||
Tmax = = T (βmax ) , βmax ≈ |
|
|
, где ηт – |
|
|
|
ηт |
термический КПД |
индуктора; |
||
Tп - температура на поверхности заготовки. При глубинном нагреве возможен перегрев внутренних слоев. В то же время увеличение тепловых потерь сокращает время нагрева, так как позволяет поднять уровень мощности в заготовке. Очевидно, q0 и, следовательно, толщина тепловой изоляции должны варьироваться с целью минимизации энергозатрат при ограничении по температуре в точке максимума;
|
|
|
T |
Tmax |
|
|
|
|
|
|
|
|
|
Tп |
|
p0 , |
|
|
|
|
|
|
|
p0(t) |
|
|
|
|
|
|
|
T |
|
|
Tц |
|
|
|
|
|
Tп |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tц |
|
|
|
|
|
|
0 |
|
t |
0 |
|
βн |
1 |
β |
|
Рис. 2.1 |
|
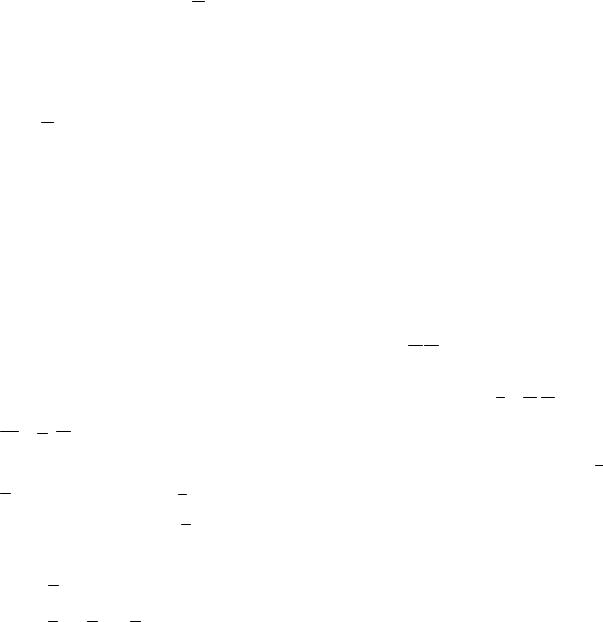
Рис. 2.2 |
|
|
|
|
|
|
|
32 |
|
|
|
|
в) главный канал управления - функция |
p0 (t ) . Из теории теплопровод- |
|||
ности известно, что минимальным время нагрева будет при Tп = max = const . |
||||
Для этого надо, чтобы |
p0 (t ) t=0 ® ¥ (рис. 2.2). Такой режим нереализуем. |
|||
Всегда p0 ≤ pmax из соображений максимально допустимой токовой нагруз- |
||||
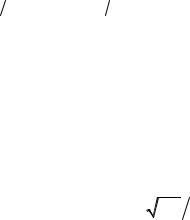
ки в обмотке индуктора и из условия |
p0 , |
|
||
ограничения по механическим напряже- |
T |
|
||
ниям во избежание термических трещин |
Tп |
|
||
p0max |
T |
|||
(рис. 2.3). |
|
|
Tц |
|
|
|
p0 |
|
|
Кривые изменения удельной мощно- |
p0(τ) |
|
||
сти, удовлетворяющие первой задаче оп- |
|
|
||
тимизации, |
поддаются |
аналитическому |
|
t |
расчету в линейном приближении в виде |
Рис. 2.3 |
|
||
θ (τ) и Ki (τ) . На практике мощность ре- |
|
|
||
гулируется ступенчато. В такой постановке задача оптимального управления |
||||
сводится к экстремальному уравнению, т. е. к поиску минимума функции |
||||
(n − 1) переменных, где n – число ступеней. |
|
|
||
|
2.1.3. Произвольный закон управления мощностью |
|
||
Ставится задача определения закона управления мощностью при произвольном изменении Ki (τ) . Воспользуемся критериальной формой уравнения теплопроводности
∂θ |
- Ñ2q = Ki (t) w(a, b) . |
(2.1) |
¶t |
|
|
Примем Ki (τ) = Ki0 = const . Тогда, как было показано ранее, решением уравнения (2.1) будет θ (β, τ) = Ki0ϕ (α, β, τ) . Если же Ki (τ) - любая гладкая
функция, то решение уравнения (2.1) можно найти с помощью интеграла наложения:
q(b, t) = ∫τ Ki (t)j¢(t - x)d x . |
(2.2) |
0 |
|
При решении интегрального уравнения (2.2) воспользуемся операторным методом и приведем его основные положения. С помощью операторного метода, или преобразования Лапласа, функция-оригинал f (t ) переводится в
33
функцию-изображение f (s) , или, короче, оригинал f (t ) – в изображение
|
|
(s) . Связь между f |
(t ) и |
|
(s) называется соответствием и обозначается |
||||
|
f |
f |
|||||||
|
следующим образом: f (t ) { |
|
(s )}, или |
|
(s) = |
||||
посредством символа |
|
f |
|||||||
f |
|||||||||
=−1{ f (s)}. Преобразование функций операторным методом осуществляется
спомощью таблицы соответствий (см., например, [1]) и правил (теорем) отображения выполняемых над функциями операций.
Интегральная комбинация функций Ki (τ) и ϕ′ (τ − ξ) , содержащаяся в правой части уравнения (2.2), называется сверткой этих функций и символически обозначается Ki ϕ′ (читается: «функция Ki , свернутая с функцией ϕ′ »). Итак, имеется следующее правило (теорема) о свертке:
τ
∫ Ki(τ)ϕ′(τ − ξ)dξ = Ki ϕ′ K ϕ'.
0
Следовательно, уравнение (2.2) в изображениях примет вид θ = Ki ϕ, откуда
Ki = θ ϕ′ . Таким образом, поставленная задача решена в изображениях. Чтобы найти решение в оригиналах, необходимо найти изображения θ и
ϕ′ . Таким образом, поставленная задача решена в изображениях. Чтобы найти решение в оригиналах, необходимо найти изображения θ и
ϕ '. Вид изображения θ определяется заданным режимом нагрева. При определении изображения ϕ ' следует иметь в виду, что его оригиналом является производная ϕ′ . Воспользуемся теоремой дифференцирования для оригинала
ϕ′ sϕ − ϕ(0) и учтем тот факт, что всегда ϕ (0) = 0 . В результате имеем
ϕ′ sϕ и ϕ '= sϕ . Окончательным решением в изображениях поставленной задачи будет
|
= |
|
θ |
|
|
. |
(2.3) |
||
Ki |
|||||||||
|
|
|
|
|
|||||
|
|
sϕ |
|
||||||
2.1.4. Аппроксимация переходных характеристик
Оригиналы переходных характеристик содержат ряды, поэтому получить их изображения практически невозможно. В то же время основная составляющая переходной характеристики – S -функция – по характеру зависимости от τ близка к экспоненте (см. рис. 1.9).
Оказалось возможным представить S -функцию в переходной характе-
34
ристике ϕ (α, β, τ) = τ + S (α, β, τ) в виде комбинации экспонент:
S (α, β, τ) = S p (α, β) 2 |
(1 − e−τ τ01 ) − (1 − e−τ τ02 ) |
, |
(2.4) |
|
|
|
|
где S p (α, β) , как и прежде (см. 1.3.2), характеризует регулярный режим нагрева. Если τ01 = τ02 = τ00 , то
S (α, β, τ) = S p (α, β)(1 − e−kτ ), |
(2.5) |
|
где k = (τ00 )−1 . |
|
|
В горячем режиме нагрева сплошного цилиндра α3 = m = |
|
|
2R . |
||
Допустимость предложенной аппроксимации исследована для S (m,β, τ) при β = 1; 0,9; 0 . Установлено, что переходную характеристику для центра цилиндра (β = 0 ) следует определять по формуле (2.4), когда t01 ¹ t02 , а для поверхности (β = 1; 0,9 ) – по формуле (2.5), когда t01 = t02 . Необходимые данные для расчета этих характеристик приведены в табл. 2.1 (для β = 0 ) и 2.2 (для β = 1 ).
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
|
|
|
|
|
|
|
|
|
m |
≤ 1,5 |
3 |
4 |
6 |
8 |
10 |
20 |
40 |
∞ |
Sp ×104 |
−837 |
−886 |
−959 |
−1100 |
−1164 |
−1196 |
−1237 |
−1247 |
−1250 |
|
|
|
|
|
|
|
|
|
|
t01 ×104 |
580 |
584 |
591 |
605 |
616 |
625 |
640 |
642 |
642 |
|
|
|
|
|
|
|
|
|
|
t02 ×104 |
444 |
436 |
427 |
418 |
418 |
422 |
429 |
430 |
430 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.2 |
|
|
|
|
|
|
|
|
|
|
|
m |
1,5 |
3 |
4 |
6 |
8 |
10 |
20 |
40 |
∞ |
Sp ×104 4 |
421 |
477 |
562 |
738 |
851 |
923 |
1080 |
1163 |
1250 |
|
|
|
|
|
|
|
|
|
|
t00 ×104 |
597 |
574 |
547 |
508 |
484 |
468 |
430 |
409 |
403 |
|
|
|
|
|
|
|
|
|
|
Таким образом, формулы (2.4), (2.5) и табл. 2.1 и 2.2 могут служить основой для определения закономерностей управления мощностью при различных режимах нагрева.
35
2.2. Ускоренный индукционный нагрев как вариант оптимального управления по быстродействию
2.2.1. Задача на минимум времени нагрева
без ограничений мощности
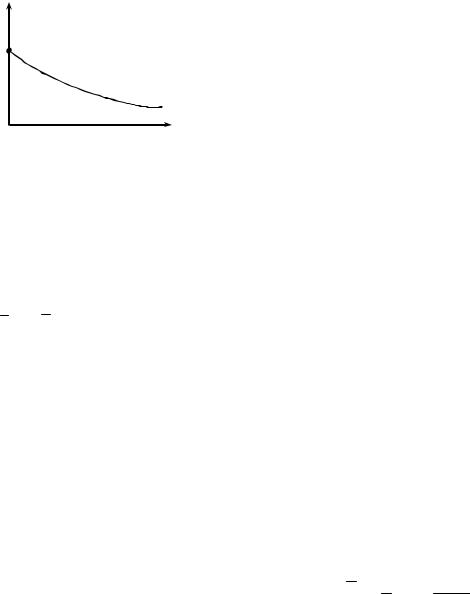
Необходимо определить режим нагрева, обеспечивающий за минимальное время достижение (при заданной температуре поверхности изделия) за-
Ki(0– ) → ∞ |
|
данного градиента температуры по сече- |
|||
|
нию нагреваемого тела. |
|
|||
Ki(τ) Ki(0+) |
|
Минимальное время нагрева до за- |
|||
|
данного перепада температуры между по- |
||||
|
|
|
|
верхностью и центром тела достигается |
|
|
|
|
|
при мгновенном установлении |
заданной |
|
|
|
температуры на поверхности θп |
и поддер- |
|
|
0 |
|
τ |
||
|
|
Рис. 2.4 |
|
жании ее до конца нагрева, т. е. до момен- |
|
|
|
|
та, когда перепад температуры между по- |
||
|
|
|
|
||
верхностью и центром уменьшится до заданного значения. В этом случае Ki (τ = 0− ) → ∞ , а Ki (τ = 0+ ) – значение ограниченное (рис. 2.4).
Используем полученное ранее решение |
|
= |
|
θ |
|
|
= |
|
|
θ |
|
и определим изоб- |
|||
Ki |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
sϕ |
|
ϕ |
' |
|||||||||
ражения θ и ϕ '. По условию поставленной задачи на поверхности (β = 1 )
оригинал θ (τ) = θп = const , а его изображение будет θп θп . s
Используем переходную характеристику при β = 1 , аппроксимированную экспонентой:
ϕ(τ) = τ + S (α, 1, τ) = τ + S p (α, 1)(1 − e−kτ )
ипродифференцируем ее:
ϕ′(τ) = 1 + S p (α, 1) ke−kτ .
Изображением, полученным с помощью (2.6), будет ϕ'= 1 + S p s
Теперь полученные изображения можно подставить в изображение закона управления мощностью:
(2.6)
k
s + k
.
(2.3) и найти
36