Материал: 836
16
|
|
|
SО = (tР +tC +0.5tН )V + |
|
K V 2 |
|
|
|
||||||
|
|
|
|
э |
|
|
|
|
||||||
|
|
|
|
gϕ . |
|
(20) |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
Полученные значения сводят в табл. 5. |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V, |
Jуст, |
tр, |
tср, |
tн, |
|
tуст, |
|
Sост, |
|
Sт, |
|
Sю, |
||
км/ч |
м/с2 |
c |
c |
c |
|
c |
|
|
м |
|
м |
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
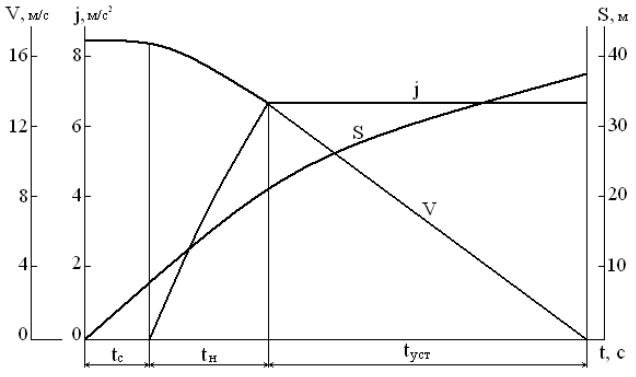
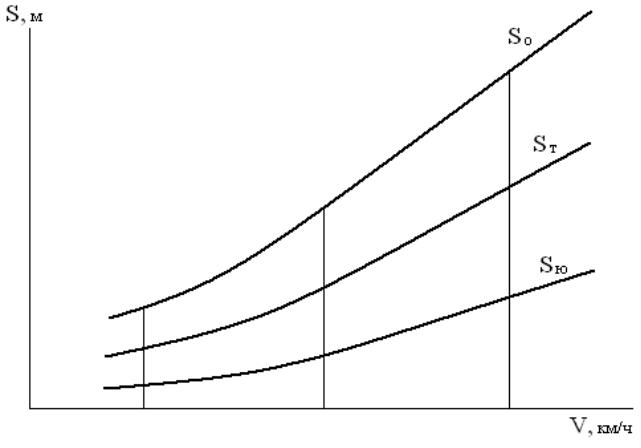
После заполнения табл. 5 необходимо построить тормозную диаграмму автомобиля (рис. 7) и график тормозного, остановочного путей и пути «юза»
(рис. 8).
Рис. 7. Тормозная диаграмма автомобиля
17
Рис. 8. График тормозного, остановочного путей и пути «юза»
7. Устойчивость автотранспортных средств
Устойчивость – совокупность свойств, определяющих положение автотранспортного средства или его звеньев при движении. Нарушение устойчивости АТС выражается в произвольном изменении направления движения, его опрокидывании или скольжении шин по дороге. Оценочными показателями устойчивости являются критические параметры движения и положения. Различают продольную и поперечную устойчивость автомобиля. Признаками потери поперечной устойчивости являются: изменение направления движения (курсовая устойчивость); поперечное скольжение (занос) и опрокидывание, а продольной устойчивости – буксование ведущих колес и опрокидывание.
Потеря автомобилем продольной устойчивости выражается, как правило, в буксовании ведущих колес, часто наблюдаемом при преодолевании автопоездом затяжных подъемов при скользкой дороге. Опрокидывание АТС в продольной плоскости возможно лишь при дорожно-транспортном происшествии.

18
Показателями курсовой устойчивости служат средняя скорость поперечного смещения без корректирующих воздействий со стороны водителя и средняя угловая скорость поворота рулевого колеса. Эти показатели определяют экспериментально при испытании АТС.
Показателями поперечной устойчивости автомобиля при криволинейном движении являются критические скорости (максимально возможные) по боковому скольжению и боковому опрокидыванию; критические углы косогора (угол поперечного уклона дороги) по боковому скольжению и по боковому опрокидыванию.
Критическая скорость автомобиля по заносу рассчитывается по формуле
VЗАН =11.3 Rϕy , |
км/ч, |
(21) |
|
где φy – коэффициент поперечного сцепления; |
|
||
R – радиус поворота автомобиля в соответствующей точке трассы. |
|
||
Коэффициент поперечного сцепления принимается равным |
|
||
ϕy = 0.8ϕx , |
|
(22) |
|
где φx – коэффициент продольного сцепления. |
|
||
Радиус поворота подсчитывается по формуле |
|
||
R = L tgQ |
СР |
, |
(23) |
|
|
|
|
где L – база автомобиля; |
|
|
|
QСР – средний угол поворота управляемых колес автомобиля. |
|
||
QСР =α |
i |
, |
(24) |
|
|
|
|
где α – угол поворота рулевого колеса;
i – передаточное отношение рулевого привода.
Критическая скорость по опрокидыванию определяется из выражения
VОПР = 8 |
|
BR |
|
, |
(25) |
hЦ + |
GК hКР2 |
|
|||
|
|
|
|
||
|
CYA −GК hКР |
|
|
|
|
|
|
|
|
|
|
где B – колея автомобиля, м; |
|
|
|
|
|
hЦ – высота центра тяжести автомобиля, м; |
|
|
|
||
GК – вес кузова, кг; |
|
|
|
|
|
hКР – плечо крена, м; |
|
|
|
|
|
CYA – суммарная угловая жесткость подвесок автомобиля, кг.м/рад. |
|
||||

19
После проведения расчетов данные заносят в таблицу, и завершающим этапом является построение графиков зависимостей VЗАН=f(α), VОПР=f(α).
8. Компоновочные параметры автомобиля и их влияние на безопасность дорожного движения
8.1. Расчет ширины динамического коридора
Под динамическим коридором автотранспортного средства понимается ширина полосы дороги (проезжей части), необходимая для безопасного его движения с заданной скоростью.
На прямолинейном участке динамический коридор определяют по эмпирическим формулам следующего типа:
BK =αV + BA +0,3 , |
(26) |
где α – коэффициент, зависящий от квалификации водителя и его психофизиологического состояния, α ≈ 0,015 −0,054 ;
BA – габаритная ширина автомобиля, м;
V – скорость движения автомобиля, м/с.
Значения BA и скорость выбирают по заданию. Расчетные значения BK , м, полученные по формуле (26), указываются в табл. 6, по ним строят график зависимости динамического коридора от скорости автомобиля BK =f(V).
Таблица 6
V, км/ч
V, м/с
BK , м
На криволинейном участке дороги динамический коридор можно рассчитать на основании формулы
BK1 = RН − RВН , |
(27) |
где RН , RВН – наружный и внутренний габаритные радиусы поворота автомобиля;
BK1 – габаритная ширина проезжей части дороги в статике, т.е. без учета скорости и поправочного коэффициента (запаса), принимаемого в расчетах равным 0,3.
20
Как известно, средний радиус поворота (траектория движения точки пересечения оси заднего моста и продольной оси автомобиля) определяется по формуле
RСР = |
L |
, |
(28) |
|
tgθ |
||||
|
|
|
где L – база автомобиля, м;
θ – угол поворота управляемых колес, град.
Задаваясь величиной угла θ , по формуле (28) определяют которого заносят в табл. 7.
Видно, что
RВН = RСР − B2A ;
RСР , значения
(29)
RН |
= (L +C1 )2 +(RВН + BА )2 , |
(30) |
где C1 – передний свес автомобиля. |
|
|
Расчетные значения RВН , |
RН , BK1 заносят в табл. 7. |
|
Для расчета динамического коридора BK на криволинейном участке, в зависимости от скорости и угла поворота управляемых колес, значения V задаются с учетом показателей устойчивости АТС, а предельное значение θ задается по техническим характеристикам автомобиля. Все значения BK , рассчитанные по формуле (26), подставляя в неё вместо BA значения BK1 , заносят в табл. 7 и строят графики зависимости динамического коридора от угла поворота управляемых колес при различных значениях скорости автомобиля.
|
|
|
|
|
|
|
Таблица 7 |
|
|
|
|
|
|
|
|
|
|
θ |
2 |
4 |
8 |
12 |
16 |
20 |
|
24 |
|
|
|
|
|
|
|
|
|
RСР , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RВН , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RН , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BK1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК.КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК.КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК.КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|