Материал: 836
11 |
|
SОБГ = SМ − S0 , м. |
(8) |
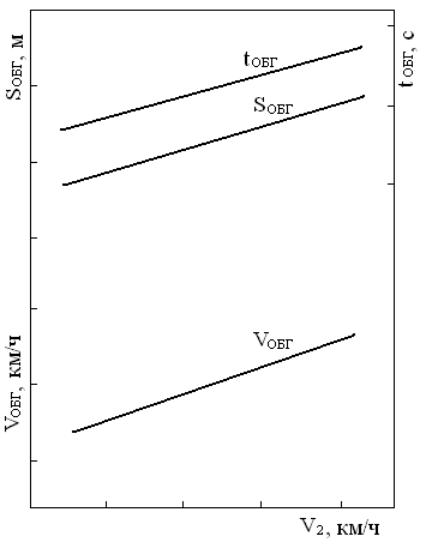
4. Для определения скорости в момент завершения обгона необходимо из точки tм опустить вниз перпендикуляр до пересечения с кривой V1= f(t), т.е. зависимостью «время-скорость» для обгоняющего ТС в момент завершения обгона - Vобг.
Рис. 4. Показатели обгона ТС
Полученные значения показателей завершенного обгона необходимо занести в табл. 2 и табл. 3.
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
V2, км/ч |
S0, м |
t0, c |
Sм, м |
tм, c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 |
|
|
|
|
|
|
V2, км/ч |
VОБГ, км/ч |
tОБГ, c |
SОБГ , м |
|
|
|
|
|
|
|
|
|
|
|
12
На основании полученных данных необходимо построить график изменения параметров обгона в зависимости от скорости обгоняемого ТС (рис. 5).
Рис. 5. График изменения параметров обгона
5. Незавершенный обгон
Выше был рассмотрен обгон, в процессе которого обгоняющий автомобиль возвращается на свою полосу движения впереди обгоняемого автомобиля. В практике часто встречаются случаи, когда водителю, начавшему обгон, не удается его закончить. Причина может заключаться либо во внезапном появлении препятствия, либо в неверном первоначальном расчете. Убедившись в невозможности закончить обгон, водитель вынужден уменьшить скорость и возвратиться в прежнее положение. Такой обгон называют незавершенным
(рис. 6).
13
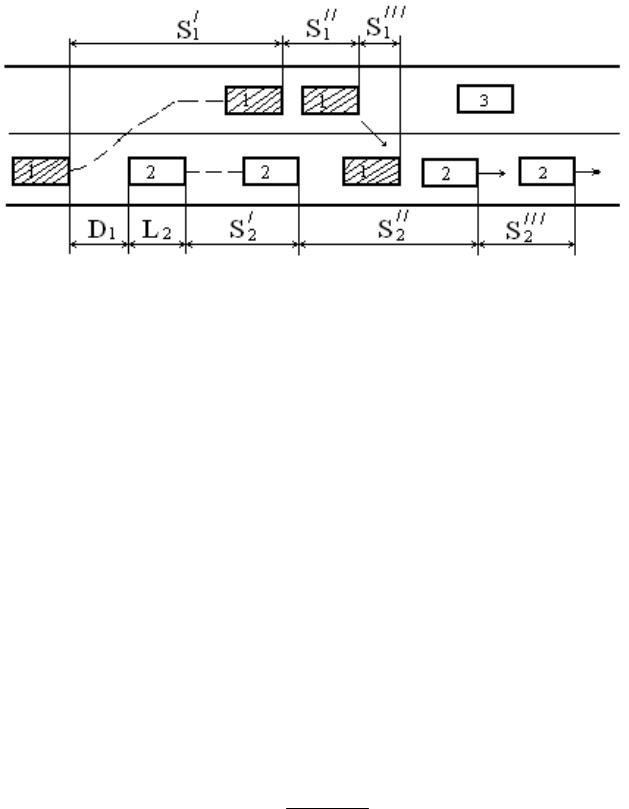
Рис. 6. Незавершенный обгон
В начале незавершенного обгона (время t /) обгоняющий автомобиль, двигаясь со скоростью V1, выезжает на соседнюю полосу движения. Решив отказаться от обгона, водитель снижает скорость автомобиля до минимально устойчивой скорости V1/. Учитывая наличие опасности для движения, водитель тормозит обычно с максимальной интенсивностью (время t //). Затем, ведя автомобиль с минимально устойчивой скоростью, водитель пропускает вперед обгоняемый автомобиль и возвращается на прежнюю полосу (время t ///). Возможность выполнения такого маневра зависит как от тяговой, так и от тормозной
динамичности автомобиля. |
|
Определим время и путь незавершенного обгона. |
|
Перемещение обгоняющего автомобиля на первом этапе обгона |
|
S1′ =V1t′, |
(9) |
где t′ – время первого этапа, с.
Перемещение обгоняемого автомобиля за время первого этапа
S2′ =V2t′.
Время первого этапа
t′ = (D(1 + L2 −)e), V1 −V2
(10)
(11)
где D1 – дистанция безопасности, м;
e – расстояние между передними частями обгоняющего и обгоняемого автомобилей в момент окончания первого этапа, м.
14
Время второго этапа
|
|
|
′ |
|
|
||
t |
′′ |
|
(V1 −V1 ) |
, |
(12) |
||
|
|
|
|||||
= jз |
|||||||
|
|||||||
где V1′ – минимально устойчивая скорость 3 – 5 м/с; jз – замедление, м/с2.
Перемещение обгоняющего автомобиля в течение второго этапа обгона
S1′′=V1t′′−0.5 jз (t′′)2 . |
(13) |
||||
Время третьего этапа обгона |
|
|
|
|
|
t′′′ = |
S1′′+ L2 + D2 − S2′′ −e |
. |
(14) |
||
|
|
||||
|
|
V2 −V1′ |
|
||
Путь обгоняющего автомобиля за время третьего этапа |
|
||||
S1′′′= |
|
S1′′+ L2 + D2 − S2′′ −e |
V1′. |
(15) |
|
|
|
||||
|
|
V2 −V1′ |
|
||
Зная продолжительность каждого этапа и перемещения обгоняющего автомобиля, можно найти и полный путь незавершенного обгона
SН.О = S1′ + S1′′+ S1′′′. |
(16) |
Соответственно, время незавершенного обгона |
|
tН.О = t′+t′′+t′′′. |
(17) |
Полученные значения показателей незавершенного обгона сводят в таблицы. По данным таблиц строится график изменения параметров незавершенного обгона в зависимости от скорости обгоняемого транспортного средства.
6. Тормозная динамичность автомобиля
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки.
Водитель, заметив препятствие, оценивает дорожную обстановку, принимает решение о торможении, переносит ногу с педали подачи топлива на тормозную педаль.
Время tр, необходимое для этих действий, – время реакции водителя – обычно находится в пределах 0,3 … 2,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.
15
Время tс (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2 … 0,3 с (гидравлический привод) до 0,6 … 0,8 с (пневматический привод).
Время tн (время нарастания замедления) обычно находится в пределах 0,4 … 0,6 с. Интервал времени tуст (время, при котором замедление постоянно) можно рассчитать по следующей формуле:
t уст = |
VK э |
, |
(18) |
|
3.6gϕ |
||||
|
|
|
где Кэ – коэффициент эффективности торможения.
У многих автомобилей достичь одновременной блокировки всех колес не удается как по причинам конструктивного характера, так и вследствие ухудшения эффективности тормозной системы и шин в процессе эксплуатации. Поэтому для приближения результатов расчета к фактическим данным в формулы вводят поправочный коэффициент Кэ. Примерные значения его для сухого асфальтобетонного или цементобетонного покрытия (φ = 0,7) даны в табл. 4.
При малом коэффициенте сцепления величина тормозных сил у любого автомобиля достаточна для доведения всех колес до скольжения. Поэтому при φ ≤ 0,7 следует принимать Кэ=1 для автомобилей всех типов.
|
|
Таблица 4 |
|
Коэффициент эффективности торможения |
|||
|
|
|
|
Автомобили |
Без нагрузки |
С полной нагрузкой |
|
|
|
|
|
Легковые |
1,1 … 1,15 |
1,15 … 1,2 |
|
|
|
|
|
Грузовые с максимальной массой |
1,1 … 1,3 |
1,5 … 1,6 |
|
до 10 т и автобусы длиной до 7,5 м |
|||
|
|
||
|
|
|
|
Грузовые с максимальной массой |
1,4 … 1,6 |
1,6 … 1,8 |
|
свыше 10 т и автобусы более 7,5 м |
|||
|
|
||
|
|
|
|
Учитывая коэффициент эффективности торможения, формулы для замедления и остановочного пути приобретают следующий вид:
jуст = |
gϕ |
; |
(19) |
|
K э |
||||
|