Материал: 836
6
2. Подготовка исходных данных
В качестве исходных данных задаются:
-марка автомобиля;
-длина обгоняющего ТС – L1;
-длина обгоняемого ТС – L2;
-максимальная скорость обгоняющего ТС – Vmax;
-постоянная времени разгона обгоняющего ТС – ТV;
-максимальное для обгоняющего ТС замедление – Jmax;
-постоянная скорость движения обгоняемого ТС – V2;
-временной интервал между обгоняющим и обгоняемым ТС перед началом обгона τ12;
-временной интервал между обгоняемым и обгоняющим ТС после завершения обгона τ21;
-коэффициент сцепления φ;
-углы поворота рулевого колеса.
Временные интервалы между ТС принимаются одинаковыми для всех вариантов заданий, они равны τ12 =2,0 с и τ21=1,5 с.
3. Определение параметров обгона
Обгон является важным маневром, который позволяет водителю ТС поддерживать оптимальную, по условиям задачи управления, среднюю скорость. Возможность выполнения обгона зависит от скорости обгоняемого и скоростных свойств обгоняющего ТС, наличия необходимого интервала во встречном потоке. Обгон может выполняться «с хода» и с ожиданием возможности обгона, когда начальная скорость обгоняющего ТС равна скорости обгоняемого автомобиля. Последняя схема является наиболее типичной для сегодняшнего состояния транспортного потока и используется при выполнении курсового проекта.
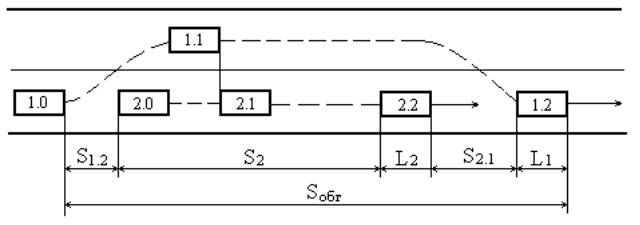
На рис. 1 представлена схема обгона «с ожиданием». Перед началом обгона водитель обгоняющего ТС следует за обгоняемым ТС с временным интервалом τ12, которому соответствует дистанция S12. В процессе обгона в определенный момент времени (положение 1.1) водитель должен принять окончатель-
7
ное решение о завершении или прекращении обгона. В случае продолжения обгона обгоняющее ТС опережает обгоняемое ТС и возвращается на свою полосу движения (положение 1.2). В момент завершения обгона между обгоняемым и обогнавшим ТС должен быть временной интервал τ21, которому соответствует дистанция S21, в последующие моменты времени величина S21 быстро увеличивается, так как скорость обгоняющего ТС выше, чем у обгоняемого.
Рис. 1. Схема обгона с ожиданием
Разгон транспортного средства при обгоне должен выполняться с максимальной интенсивностью и прекращаться плавно после его завершения. Реализация такого режима возможна только в одном случае, когда имеется необходимый интервал времени между обгоняемым ТС и автомобилем, двигающимся впереди него навстречу. (В противном случае водитель обгоняющего ТС после завершения обгона будет вынужден экстренно тормозить.) Описанный режим движения ТС обеспечивает минимальные значения пути и времени обгона по схеме «с ожиданием». Значения времени обгона tобг, пути обгона Sобг и скорости обгоняющего ТС в момент завершения обгона Vобг в зависимости от скорости обгоняемого ТС определяют предельные условия, при которых обгон может быть завершен.
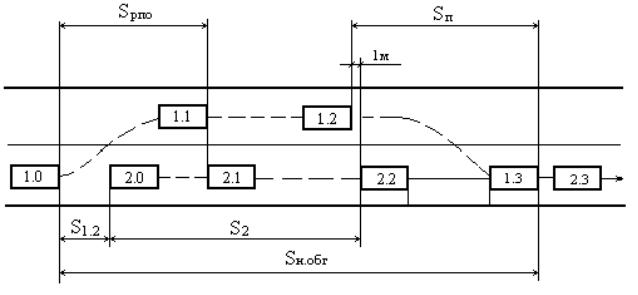
На рис. 2 показана схема незавершенного обгона. В положении 1.1 водитель принимает решение прекратить обгон и осуществляет торможение. В положении 1.2, когда обгоняющее ТС отстает от обгоняемого автомобиля на один метр, водитель прекращает торможение и так как скорость ТС1 в этот момент меньше, чем у ТС2, то последнее уходит вперед и водитель обгоняющего ТС может вернуться на свою полосу движения, совершая маневр за время τп (время перестроения).
8
Рис. 2. Схема незавершенного обгона
За это время ТС проходит путь Sп. Торможение выполняется с максимальным замедлением для данной категории ТС. Значения времени tн.обг и пути Sн.обг незавершенного обгона определяют предельные условия, при которых возможно избежать ДТП при незавершенном обгоне.
Вычисление рассмотренных выше показателей возможно графоаналитическим и аналитическим методом.
4. Завершенный обгон
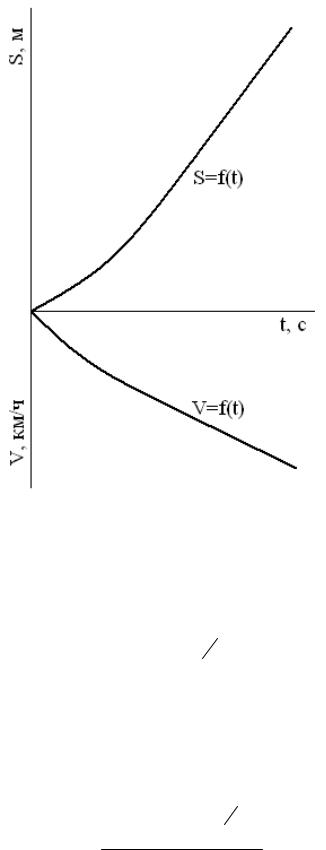
Чтобы описать методику вычислений, рассмотрим график, приведенный на рис. 3. По оси абсцисс отложено время t в секундах. По оси ординат вверх – путь, проходимый ТС1, в метрах, а вниз – скорость обгоняющего ТС.
В соответствии с ранее изложенным в первом квадрате построены графики «время-путь» обгоняющего автомобиля, а в четвертом квадрате – график «время-скорость» обгоняющего автомобиля при разгоне с максимальной интенсивностью.
9
Рис. 3. Зависимости пути и скорости обгона от времени
Чтобы определить искомые показатели, сначала необходимо построить измерения указанных зависимостей пути и скорости от времени. Вычисление значений скорости при заданном времени разгона проводится по формуле
V =VMAX 1 −e−t TV ,
где VMAX – максимальная скорость обгоняющего ТС, км/ч; t – текущее время, c;
Tv – постоянная времени разгона, с.
Вычисление значений пути производится по формуле
S = VMAX t −TV 1 −e−t TV , м.
3.6
(1)
(2)
Полученные данные заносят в табл. 1.

10
Таблица 1
t, c
S, м
V,
км/ч
Пример построения графиков по этим формулам приведен на рис. 3. Условия завершения обгона можно записать в следующем виде:
S = S12 + S2 + S21 + L1 + L2 , м, |
(3) |
где S12 – дистанция между обгоняемым и обгоняющим ТС перед обгоном, с; S21 – дистанция между обгоняемым и обгоняющим ТС после завершения
обгона, м;
L1 – длина обгоняющего ТС, м;
L2 – длина обгоняемого ТС, м.
Дистанцию между обгоняемым и обгоняющим ТС перед обгоном S12 и дистанцию между обгоняемым и обгоняющим ТС после завершения обгона S21 рассчитывают по следующим формулам:
S12 |
= |
|
τ12V2 |
||
3.6 |
|||||
|
|
||||
S21 |
= |
|
τ21V2 |
||
3.6 |
|||||
|
|
||||
, м, |
(4) |
, м . |
(5) |
Решение графоаналитическим способом показано на рис. 4 и представляет собой последовательность следующих действий:
1.Зная скорость V2, с помощью зависимости «время-скорость» находим значения t0 и S0, соответствующие началу обгона.
2.От точки А (с координатами S0, t0) откладываем вверх величину
SОБГ = S12 + S21 + L1 + L2 , м. |
(6) |
|
3. Из найденной точки С проводим под углом α ( |
V2 = tgα |
, выраженным в |
|
||
4 |
|
|
м/с) прямую до пересечения с кривой разгона обгоняющего автомобиля «вре- мя-путь». Точка пересечения М (с координатами Sм, tм) является моментом завершения обгона.
Время и обгона будут соответственно равны |
|
tОБГ = tМ −t0 , с, |
(7) |