Материал: 6251
ω ≠ 1 , и эта даже небольшая разница с течением времени приводит к всё
бо́льшим отличиям получаемого решения от реального процесса. Ляпунов и независимо от него Рэйли предложили несколько видоиз-
менить составление уравнений (2.3.34). Они предложили частоту нулевого приближения взять равной не единице, а некоторому неизвестному
пока значению |
ω≠1. Поскольку при = 0 |
должно выполняться равен- |
|||||||||||||||||||||||
ство ω =1 или ω2 =1, частота ω должна зависеть от µ |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
ω2 = ω2 (µ)=1+ µh + µ2h + ... |
, |
|
|
|
|
(2.3.37) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
||
где h1, h2 и т.д. – частотные поправки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Перепишем уравнение (2.3.28) в виде |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
ɺxɺ+ ω2x = (ω2 −1)x + µϕ(x, xɺ). |
|
|
|
|
|
(2.3.38) |
|||||||||||||
Подставив ряды (2.3.31) и (2.3.37) в уравнение (2.3.38), получим |
|||||||||||||||||||||||||
ɺɺ |
ɺɺ |
|
2 |
ɺɺ |
+ ...)+ ω |
2 |
(x0 |
+ µx1 + µ |
2 |
x2 |
+ ...)= (µh1 |
+ µ |
2 |
h2 + ...)× |
|
||||||||||
(x0 + µx1 + µ |
|
x2 |
|
|
|
|
|||||||||||||||||||
× (x |
+ µx |
+ µ2x |
2 |
+ ...)+ +µϕ(x , xɺ |
0 |
)+ µ2 |
∂ϕ |
|
|
x |
+ µ2 |
∂ϕ |
|
xɺ |
+ ... . |
||||||||||
|
|
|
|||||||||||||||||||||||
|
|
||||||||||||||||||||||||
0 |
1 |
|
|
|
|
|
|
0 |
|
|
|
|
∂x |
|
1 |
|
|
∂xɺ |
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x=x0 |
|
|
|
x=x0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x=x0 |
|
|
|
|
x=x0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ɺ |
ɺ |
|
|
|
|
ɺ ɺ |
|
|
Далее процедура известна – раскрываем скобки и приравниваем множители при µ в одинаковых степенях в правой и левой частях полученного выражения. В результате получаем бесконечную систему линейных дифференциальных уравнений
116
ɺxɺ |
+ ω2 x |
|
= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ɺxɺ |
+ ω2x = h x + ϕ(x |
, xɺ |
), |
|
|
|
|
|
|
|
|
|
|
|||||
1 |
1 |
1 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||
ɺxɺ |
+ ω2 x |
|
= h x |
+ h x |
+ |
∂ϕ |
|
|
|
x + ∂ϕ |
|
|
xɺ |
, |
(2.3.39) |
|||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
2 |
|
2 |
1 1 |
2 0 |
|
|
|
|
x= x |
0 |
1 |
ɺ |
|
x=x |
1 |
|
|
|
|
|
|
|
|
|
|
∂x |
|
ɺ ɺ |
|
∂x |
|
ɺ ɺ |
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
x= x0 |
|
|
|
x=x0 |
|
|
||
... .
Последовательно решая уравнения (2.3.39), получаем все больше и больше членов ряда (2.3.31). Частотные поправки hk вычисляются из условий равенства нулю вековых членов последовательно по всей цепочке уравнений. Попутно узнаём всё точнее неизвестную частоту ω в соответствии с формулой (2.3.37).
2 . 3 . 9 . Гар мо ническая линеар изация
Метод гармонической линеаризации предложили Н.М. Крылов и Н.Н. Боголюбов в 1934 г. В приложении к САУ этим методом занимались Л.С. Гольдфарб и Е.П. Попов. В учебной и технической литературе встречаются и другие названия этого метода – метод гармонического баланса, метод описывающих функций, метод эквивалентной линеаризации.
Рассматриваемый метод применяется для определения условий возникновения и параметров автоколебаний, а, следовательно, и определения областей устойчивости и неустойчивости. Кроме того, гармоническая линеаризация может быть применена для исследования вынужденных колебательных режимов и переходных процессов при медленно меняющихся воздействиях.
По-прежнему представляем систему состоящей из нелинейного звена
117
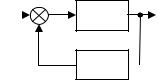
с характеристикой ϕ(x)и линейной части, заданной передаточной функ-
цией W(s) (рис. 2.27).
W(s)
−
y
φ(x)  x
x
Рис. 2.27. Нелинейная система
Применение метода гармонической линеаризации основано на предположении о том, что в системе существуют автоколебания, более того, колебания на входе нелинейного звена являются моногармоническими
x(t)= x0 + Asinωt , |
(2.3.40) |
где x0 – постоянная составляющая, A – амплитуда, а ω – частота автоколебаний.
На самом деле автоколебания в нелинейной системе не являются моногармоническими вследствие искажения сигнала нелинейным звеном. Но предположение о моногармоническом сигнале на выходе линейной части (или на входе нелинейного звена, что одно и то же) основано на факте, что в большинстве случаев линейная часть является фильтром нижних частот (гипотеза фильтра). Это означает, что амплитуды высших гармоник много меньше, чем амплитуда основной частоты ω . Поскольку частота автоколебаний ω выясняется только в результате применения метода гармонической линеаризации и заранее неизвестна, проверку гипотезы фильтра возможно провести только в конце исследования. Если в
результате такой проверки гипотеза фильтра не подтверждается, к полу118
ченным результатам следует подходить с осторожностью и, по возможности, провести дополнительное исследование каким-либо другим методом.
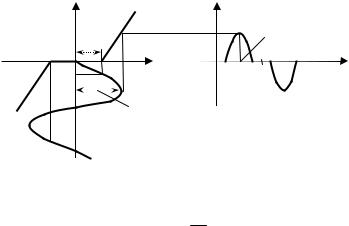
На выходе нелинейного звена сигнал уже не будет моногармоническим из-за нелинейных искажений (на рис. 2.28 показан пример прохождения синусоидального сигнала через усилительное звено с зоной нечувствительности).
Поскольку сигнал y на выходе нелинейного звена периодический, можно разложить его в ряд Фурье, а так как через линейную часть проходит только первая гармоника (гипотеза фильтра), то имеет смысл интересоваться именно этой гармоникой. В результате получим
y(t)= ϕ(x)= y0 + C1 sinωt + C2 cosωt , |
|
|
|
(2.3.41) |
||||
|
y |
|
y |
|
|
|
|
|
|
a |
|
|
π/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
π |
|
|
|
|
α |
x |
2 |
|
π |
ωt |
|||
|
|
|
|
|
|
|
||
|
π |
А |
|
|
|
|
|
|
2π
Рис. 2.28. Искажение сигнала нелинейным звеном
где постоянная составляющая y0 = 1 2∫πϕ(x)d(ωt), а коэффициенты 2π 0
Фурье С1 и С2 вычисляются по известным формулам
119

C1 = 1 2∫πϕ(x)sinωt d(ωt),
π 0
C2 = 1 2∫πϕ(x)cosωt d(ωt).
π 0
Выражение (2.3.41) удобнее представить несколько в другом виде. Найдём из формулы (2.3.40) sinωt и cosωt
sinωt = |
x − x0 |
, cosωt = |
p(x − x0 ) |
|
, ( p = |
d |
) |
|
Aω |
|
|||||
|
A |
|
|
dt |
|||
и подставим в формулу (2.3.41). Получим
|
|
|
|
|
|
|
k′ |
|
|
y = k |
|
x |
|
+ k |
|
+ |
г |
p |
(x − x ) |
|
|
|
|
||||||
|
г0 |
|
0 |
|
г |
|
ω |
|
0 |
или
|
|
k′ |
|
|
|
y = y0 |
+ kг + |
г |
p |
(x − x0 ) . |
|
ω |
|||||
|
|
|
|
В приведённых соотношениях введены обозначения
|
|
|
|
|
y0 |
|
|
|
|
1 |
2π |
|||
|
kг0 = |
= |
|
|
|
∫ϕ(x)d(ωt), |
||||||||
|
|
|
|
|
x |
|
2π |
|||||||
|
|
|
|
|
x |
|
|
|
|
|
0 |
|||
|
|
|
|
|
0 |
|
|
0 |
|
|||||
|
|
C |
|
|
1 |
|
|
2π |
|
|
||||
kг |
= |
1 |
|
|
= |
|
|
|
|
|
∫ϕ(x)sin(ωt)d(ωt), |
|||
|
|
|
|
|
|
|
||||||||
|
|
A |
|
|
Aπ 0 |
|
|
|
||||||
|
|
C2 |
|
|
|
1 |
|
|
2π |
|
|
|||
kг′ = |
|
= |
|
|
|
∫ϕ(x)cos(ωt)d(ωt). |
||||||||
|
|
|
|
|
|
|||||||||
|
|
A |
|
|
|
Aπ 0 |
|
|
|
|||||
120
(2.3.42)
(2.3.43)
(2.3.44)