Материал: 493
1 – при ожидаемом сигнале; 2 – при неожиданном сигнале
В книге Сильянова В.В. описано основное уравнение простой динамической модели плотного потока в следующем виде:
d = lо + lр + lт2 – lт1 + lj. (7.4)
Расстояние lо между остановившимися автомобилями принимается в зависимости от скорости движения:
|
V, км/ч |
|
20 |
40 |
60 |
80 |
100 |
|
|
|
lо, м |
|
3 |
|
6 |
10 |
12 |
15 |
|
Путь заднего |
автомобиля |
lр |
за время запаздывания водителя |
||||||
вычисляется по формуле: |
lр = t V2 (tр + tmin), |
||||||||
|
|
||||||||
где: t > 1 – параметр безопасности, |
зависящий от величины времени |
||||||||
запаздывания; |
|
|
|
|
|
|
|
|
|
V2 – скорость заднего автомобиля; tр – время реакции водителя; tmin – минимальное время, необходимое водителю для осознания ситуации (см. на рис. 26 смещение кривой 2 относительно кривой 1).
Разность lт2 – lт1 тормозных путей вычисляется по формуле: lт2 – lт1 = V (lт2 –lт1), lт1 = V12/(2 jmax)/k, lт2 = V22/(2 jmax),
где: V – параметр безопасности, зависящий от разности скоростей переднего V1 и заднего V2 автомобиля; если разность V2 > V1, то параметр
V 1; если V2 < V1, то V < 1;
параметр k 1 учитывают в том случае, если водитель заднего автомобиля тормозит с замедлением меньше максимального;
jmax – максимальное замедление переднего автомобиля, которое может ожидать водитель заднего автомобиля; оно ограничено коэффициентом сцепления шин;
Поправка lj учитывает способность водителя заднего автомобиля чувствовать величину замедления переднего автомобиля. Поправка вычисляется с помощью функции:
lj = f ( а, jmax, t, tр, V2),
где: а – дополнительный коэффициент, учитывающий способность водителя заднего автомобиля чувствовать замедление.
Формула (7.4) позволяет учесть все особенности процесса торможения двух автомобилей. Полный вид функции поправки можно найти в работе Wohl M, Martin V. “Traffic System Analysis”. 1967 – 570 p.
При практическом применении основного уравнения (7.4) необходимы значения 9 параметров. Они зависят от состава и скорости потока, состояния водителей, сцепления шин с дорогой и др. Значения параметров можно найти в специальной литературе.
Расстояния между двумя автомобилями, найденные по простой модели, распространяют на весь поток автомобилей. Такой подход нельзя
36
считать корректным, так как не учитывается разнородность состава плотного потока. На практике выполняют следующие действия:
–по формулам (7.3), (7.4) вычисляют расстояния для комбинаций разных моделей автомобилей;
–используя экспериментальные данные, находят по эмпирическим зависимостям те же расстояния для выбранных комбинаций;
–рассчитывают средние значения, полученные по расчетным и эмпирическим зависимостям.
7.2. Динамическая теория следования за лидером
Теория следования за лидером является развитием простых динамических моделей, рассмотренных выше. В основу тории положена гипотеза: в плотном потоке взаимодействие автомобилей подчиняется некоторому закону.
Движение автомобиля в потоке описывается дифференциальным уравнением. Поэтому применяются начальные условия. Полагают, что в начальном состоянии все автомобили движутся на расстоянии, определенном правилами дорожного движения. Положение (координаты) автомобилей на дороге определяют по переменной x.
Учитывают следующие расстояния, м:
lО – минимальное расстояние между стоящими автомобилями; ln – длина автомобиля номер n;
lРn – путь автомобиля номер n за время реакции водителя tР.
Задний автомобиль имеет номер n, передний – номер n + 1 (рис. 22). Задний автомобиль, движущийся со скоростью Vn, за время tР реакции водителя проходит путь tР Vn.
37
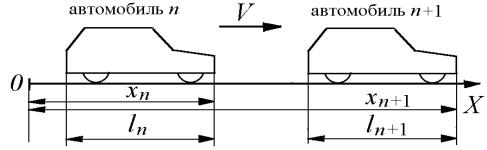
Рис. 22. Номера автомобилей на дороге
Запишем координату xn+1 переднего автомобиля, связывая ее с координатой xn заднего автомобиля:
xn+1 = xn + lО + tР Vn + ln+1. (6.5)
Дифференцируем формулу (6.5) по времени t. Учитываем, что расстояния lО, ln+1 являются постоянными:
xn+1/dt = dxn/dt + tР dVn/dt. |
(6.6) |
||
Выражаем производные через скорости автомобилей: |
|
||
xn+1/dt = Vn+1; dxn/dt = Vn; dVn/dt = jn, |
|
||
где jn, м/с2 – ускорение заднего автомобиля. Получаем уравнение: |
|
||
|
|
|
|
jn = (Vn+1 – Vn)/tР; xn (xn 1 xn )/tр. |
(6.7) |
||
Уравнение (6.7) называют первым дифференциальным уравнением теории следования за лидером. Оно выражает следующее: задний автомобиль движется с ускорением прямо пропорциональным разности скоростей переднего и заднего автомобилей. Время tР в дифференциальном уравнении является постоянной времени.
Отношение 1/tР называют коэффициентом пропорциональности или чувствительностью водителя заднего автомобиля и записывают уравнение в виде:
jn = (Vn+1 – Vn). |
(6.8) |
Основной принцип модели следования за лидером заключается в том, что водитель реагирует на разность скоростей, которая рассматривается как раздражение. Реакцией водителя является ускорение, которое создается разгоном автомобиля с помощью педали «газ» или торможением с помощью педали «тормоз».
Запишем уравнения (6.7) для двух автомобилей:
|
|
|
|
xn 1 |
(xn 2 xn 1)/tр; |
(6.9) |
|
|
|
|
|
xn (xn 1 xn )/tр.
где xn+2 – перемещение переднего, третьего n + 2 автомобиля. Мы получили систему двух дифференциальных. Однако эта система фактически выражает запаздывание движения автомобиля n + 1 относительно автомобиля n + 2, и запаздывание автомобиля n
38
относительно автомобиля n + 1. Оно выражается в сдвиге по времени расстояний и уменьшении амплитуды их изменения.
Исследования, выполненные зарубежными учеными Д. Гейзис, Р. Герман и Р. Потс, показали, что коэффициент не является постоянным. Он зависит от расстояния d между автомобилями и характерной, средней скорости потока v0:
= v0/d. |
(6.10) |
При уменьшении расстояния и увеличении скорости v0 |
водитель вынужден |
быстрее реагировать на раздражение. |
|
Запишем уравнение (6.8) с учетом формулы (6.10): |
|
jn = v0 (Vn+1 – Vn)/d. |
(6.11) |
Это уравнение называют вторым основным |
уравнением теории |
следования за лидером. Из него следует: ускорение заднего автомобиля прямо пропорционально разности скоростей переднего и заднего автомобилей, и обратно пропорционально расстоянию между ними. В этом уравнении теперь не присутствует время реакции водителя (см. уравнение
6.7).
Системы дифференциальных уравнений, составленные из уравнений (6.11), описывают движение автомобилей в пачке, состоящей из трех и более автомобилей.
По уравнению (6.11) реакция водителя зависит не только от расстояния до следующего перед ним автомобиля. Для анализа этой взаимосвязи предложена обобщенная формула коэффициента чувствительности водителя заднего автомобиля, учитывающая число m
автомобилей в пачке:
= З v0m/dсk,
где З 1 – коэффициент, учитывающий чувствительность водителя заднего автомобиля; dс – среднее расстояние между автомобилями в группе. Степень k обычно принимают в пределах от m – 2 до m.
Запишем коэффициент в том виде, в каком он участвует в формуле (6.10): = v0/d. Подставляем размерности и получаем: (м/с)/м = с–1. То есть, обратная величина 1/ также является постоянной времени T.
Пусть поток движется со скоростью 8 м/с (менее 10 км/ч), T = 3 с. Построим график изменения скорости заднего автомобиля при скачкообразном увеличении скорости переднего автомобиля на 4 м/с (рис. 23).
Зависимость скорости от времени выражается экспоненциальным законом с постоянной времени 3 с, для которого на рис. 23 величина
= = 0,63 4 = 2, 52 м/с.
Выполнены расчеты движения пачки из 4 автомобилей. Выявлены следующие особенности и закономерности.
39
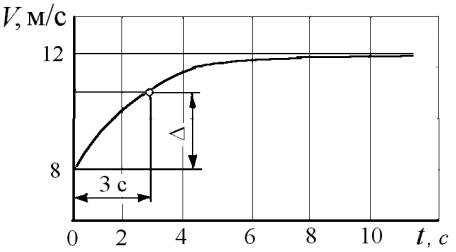
Рис. 23. График приближения скорости заднего автомобиля к скорости переднего автомобиля 12 м/с
Уравнения (6.7) и (6.11) фактически уже не учитывают расстояния lО и ln между автомобилями в пачке, которые были использованы в расчетной схеме, хотя они имеются в начальных условиях. При увеличении скорости переднего автомобиля пачка растягивается по пути, а при снижении скорости – сжимается. В результате расстояния d между автомобилями не связаны с расстояниями lО, ln и lРn.
Для уточнения уравнений предлагается ввести в формулы дополнительный член:
|
|
|
xn v0 (xn 1 xn )/d (xn 1 xn )/ d , (6.12)
где – пространственный интервал между автомобилями при средней скорости потока (см. рис.20); d = (2 … 4) v0/d – время реакции водителя на изменение интервала между автомобилями. По величине дополнительный член меньше первого члена в 2 … 4 раза. Он учитывает стремление водителей выдерживать безопасное расстояние или образовывать пачку автомобилей.
При расчете приходится учитывать ограничение максимального замедления автомобиля сцеплением шин с дорогой, и ограничение максимального ускорения по внешней, скоростной характеристике двигателя.
Рассмотрим движение пачки из 4 автомобилей при служебном торможении первого автомобиля с замедлением 3,5 м/с2 в течение 1,5 с. Отношение v0/d примем 0,5 с. Ограничим максимальные ускорения автомобилей 3 м/с2, минимальные замедления – минус 7 м/с2. Примем начальную скорость 60 км/ч. Результаты расчета отобразим на рис. 24 и рис. 25.
Пусть передний автомобиль №4 снизил скорость и движется с этой скоростью равномерно.
40