Материал: 493
полосами – до 1250 авт/ч (325 на одну полосу).
6.4. Смешанные распределения
Наибольшее практическое применение получило трехкомпонентное, смешанное распределение, предложенное Лобановым Е.М., которое называют составным распределением. Вероятность p(t) интервалов времени складывается из трех слагаемых:
p(t) A p1(t) B p2 (t) C p3(t),
где p1(t), p2(t), p3(t) – функции, выражающие распределения интервалов соответственно в свободном, частично связанном и связанном потоке. Коэффициенты A, B, C равны долям интенсивности движения в свободной, частично связанной и связанной части потока от общей интенсивности.
Смешанное распределение позволяет хорошо описывать распределение интервалов на магистралях с непрерывным движением: на дорогах с двумя полосами движения при интенсивности до 450 авт/ч, с четырьмя полосами – до 1000 авт/ч, и с шестью полосами – до 2000 авт/ч.
Кроме рассмотренных распределений иногда используют распределение Эрланга и Гамма. Формулы, выражающие эти распределения можно найти в книге /2/.
6.5. Области применения распределений
Рассмотренные распределения применяются для описания транспортных потоков типа А, Б и В (табл. 3).
|
|
|
|
Таблица 3 |
Закон распределения |
Интенсивность движения |
Уровень |
||
интервалов |
2х пол. 4х пол. 6ти пол. |
удобства |
||
Пуассона |
200 |
500 |
1100 |
А |
Пуассона с поправками |
250 |
600 |
1200 |
А |
Пирсона III типа |
650 |
1250 |
2250 |
Б, В |
Эрланга |
300 |
800 |
1200 |
Б |
Гамма |
250 |
850 |
1300 |
Б |
Смешанное распределение |
450 |
1000 |
2000 |
А, Б, В. |
Распределения являются основой для теоретического описания движения ТП при невысокой его плотности (коэффициент загрузки kз 0,5). Такие потоки образуются часто. Для них требуется применение мероприятий по повышению безопасности движения, а также планировочных мероприятий и мероприятий по организации движения.
Вероятностные законы применяют при решении следующих задач:
– оценка эффективности планировочных решений и средств
31
регулирования;
–оценка пропускной способности участков пересечения, переплетения и слияния потоков;
–выбор оптимального режима работы светофорных объектов;
–оценка аварийности движения.
Следует заметить, что на практике наиболее часто применяют распределение Пуассона. Оно наиболее простое, что значительно упрощает аналитический аппарат. Все основные решения, применяемые в теории массового обслуживания, получены на основе распределения Пуассона. Для других распределений аналитические решения, пригодные для практического применения, еще не разработаны. В связи с применением в светофорных объектах микропроцессоров последнее замечание не уже имеет принципиального значения. Современные микропроцессоры позволяют быстро вычислять интегралы и другие сложные функции.
§7. Моделирование движения плотных потоков
Потоки, в которых автомобили движутся в тесном взаимодействии друг с другом, относят к плотным потокам. Они образуются при уровнях удобства В и Г.
Для описания движения ТП при высокой плотности применяются три теории: динамическая теория следования за лидером, спектральная теория взаимодействия автомобилей в колонне и макроскопическая теория транспортного потока.
Существуют два подхода к описанию движения плотного потока:
1)учитывают взаимодействие между отдельными автомобилями;
2)представляют поток в виде сплошной среды.
Первый подход принято называть микроскопическим подходом, а второй – макроскопическим подходом.
При микроскопическом подходе используют закономерности взаимодействия одиночных автомобилей между собой в плотном потоке. Наибольшее внимание обращают на механизмы воздействия автомобилей друг на друга, детально рассматривая работу системы «автомобиль - водитель».
В плотном потоке режим движения автомобилей устанавливается в зависимости от решений, принимаемых водителями. Действия водителя
32
зависят от дистанции между автомобилями, скорости, состояния покрытия дороги, технического состояния автомобиля и обстановки на соседних полосах движения. Движение потока также зависит от времени реакции водителей. Частично используют сведения, полученные в курсе «Теория автомобиля».
Модели, получаемые при микроскопическом подходе, позволяют рассчитывать пропускную способность дорог, среднюю скорость движения, плотность ТП. Микроскопический подход дает хорошие результаты при рассмотрении коротких участков дорог.
При макроскопическом подходе поток представляют в виде сплошной среды, например, сжимаемой или несжимаемой жидкости. Это позволяет использовать математический аппарат, разработанный в гидродинамике или динамике газов.
Получают общие параметры, выражающие плотность, интенсивность и скорость ТП. Дополнительно получают параметр, характеризующий энергетическое состояние потока. Последний параметр не привычен для автомобилистов. Модели, получаемые по второму подходу, позволяют рассчитать общие параметры ТП и связи между ними. Однако опускаются механизмы взаимодействия автомобилей друг с другом, которые детально рассматриваются при первом подходе.
7.1. Простая динамическая теория движения плотного потока
Рассмотрим параметры, характеризующие взаимодействие автомобилей в плотном потоке.
Динамические модели, относящиеся к первой группе, построены на двух гипотезах: все автомобили движутся в потоке с одинаковой средней скоростью; расстояние между автомобилями достаточно для их полной остановки.
Скорость V потока считают независимым параметром. Основной задачей простой динамической теории является описание зависимости пространственного интервала lП от скорости и влияющих факторов. Плотность и интенсивность ТП находят по этому интервалу. Пространственный интервал lП связывают с минимальным, безопасным
расстоянием d между бамперами автомобилей. |
|
В первом приближении расстояние d считают суммой: |
|
d = lа + lр + lо, |
(7.1) |
где lа – длина переднего автомобиля; lр = V tр – путь, проходимый задним автомобилем за время реакции водителя; lо – запас пути. Фактически полагают, что тормозные пути переднего и заднего автомобилей одинаковые.
33
Применение формулы (7.1) дает большие погрешности, так как не учитываются сцепление шин с покрытием, различие тормозных свойств автомобилей и времени реакции водителей.
Во втором приближении расстояние d находят с учетом тормозного пути lт заднего автомобиля:
d = lа + lр + lо + lт. |
(7.2) |
Тормозной путь lт вычисляют по приближенной формуле: lт = V2/(2 g ),
где – коэффициент сцепления шин с покрытием дороги, g = 9,81. Фактически полагают, что тормозной путь переднего автомобиля равен нулю.
Формула (7.2) лучше описывает экспериментальные зависимости интервала d от скорости на разных дорогах. Однако она дает завышенные значения интервала d, так как передний автомобиль не может мгновенно остановиться. Формула отражает процесс экстренного торможения автомобиля, но не учитывает различие тормозных свойств переднего и заднего автомобилей.
Для учета указанного различия формулу (7.2) усложняют:
d = lа + lр + lо + lт2 – lт1, (7.3)
где lт1, и lт2 – тормозной путь переднего и заднего автомобилей. Применение формулы вида (7.3) позволяет получить результаты,
более близкие к фактическим данным. При расчете можно подбирать значения параметров, отражающих влияющие факторы: время реакции водителя; эксплуатационное состояние тормозов; сцепление шин с покрытием дороги.
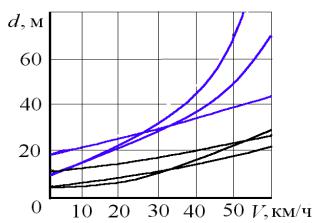
Однако результаты расчетов по формуле (7.3), полученные разными исследователями, существенно отличаются (рис. 24). Разница обусловлена различием значений параметров, отражающих влияющие факторы, которые используют исследователи.
Рис. 24. Зависимости пространственных интервалов от скорости, рассчитанные разными исследователями
Экспериментальные исследования, выполненные разными авторами,
34
показали, что фактически нет такого существенного различия в величинах расстояний d (рис. 25). Однако время реакции водителей изменяется в широких пределах. Например, при движении в потоке время реакции одного водителя изменяется в течение 2 часов от 0,45 до 1,2 c. Если у переднего автомобиля несправна система сигнализации и не работает сигнал торможения, то при больших расстояниях водитель заднего автомобиля реагирует на торможение иногда через 5 … 6 c.
Рис. 25. Экспериментальные зависимости пространственных интервалов от скорости: 1 – Хорошилов Н.Ф., 2 – Сильянов В.В., 3 – США
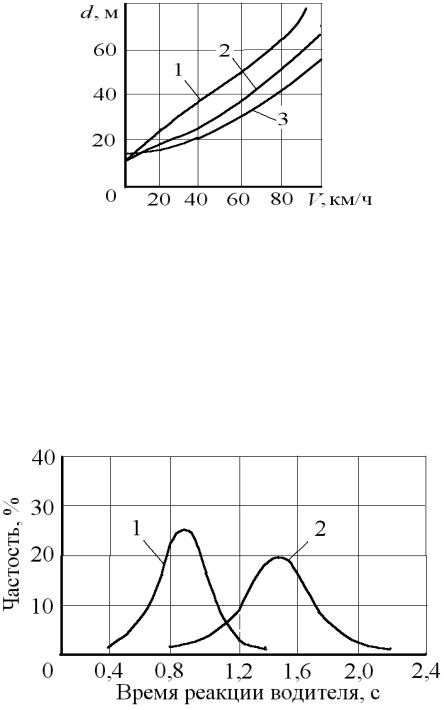
Эксперименты, выполненные Лобановым Е.М, показали, что время реакции водителя существенно зависит от времени рабочего дня. В первой половине рабочего дня время изменяется от 0,3 до 0,77 c при среднем значении 0,42 c. Во второй половине рабочего дня время изменяется от 1,13 до 2,25 c при среднем значении 1,4 c. То есть, увеличивается почти в два раза. Установлено, что время реакции водителя распределяется по нормальному закону (рис. 26). Лобановым Е.М. разработана методика расчета времени реакции водителя в различных дорожных условиях.
Рис. 26. Распределение времени реакции водителя на двухполосной дороге:
35