Материал: 4017
8
Для обеспечения геометрической неизменяемости системы (балки или рамы) в плоскости достаточно трех связей. Каждая связь запрещает какое-либо перемещение [3].
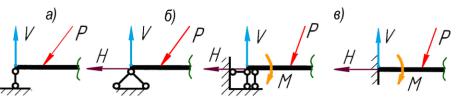
Подвижная шарнирная опора (рис. 1.1, а) накладывает одну связь, препятствующую перемещениям в направлении, перпендикулярном ее основанию.
Рис. 1.1. Виды опор и реакций в них
Этой связи соответствует одна реакция V. Неподвижная шарнирная опора (рис. 1.1, б) накладывает две связи, препятствующие перемещениям в вертикальной и горизонтальной плоскостях. Им соответствуют две реакции – V и Н.
Консольная заделка (защемление) накладывает три связи, препятствующие вертикальному и горизонтальному перемещениям и повороту опоры (рис. 1.1, в).
В статически определимых балках опоры устраиваются таким образом, чтобы было наложено три связи, причем должна отсутствовать возможность перехода системы в механизм или мгновенная ее изменяемость [4].
Каждая дополнительная связь сверх трех для плоских систем превращает конструкцию в статически неопределимую. Такие дополнительные связи, которые не являются необходимыми для обеспечения геометрической неизменяемости конструкции, называются лишними [5].
Для выполнения данного задания студенту необходимо вспомнить темы из теоретической механики:
- связи, виды связей, реакции связей; момент силы относительно центра на плоскости, пара сил, момент пары сил, свойства пар сил; условия и уравнения равновесия произвольной плоской системы сил.
По сопротивлению материалов необходимо освоить: построение эпюр продольных сил, поперечных сил и изгибающих моментов; раскрытие статической неопределимости с помощью метода сил; определение перемещений методом Мора и Верещагина.
9
1.2. Раскрытие статической неопределимости стержневых систем методом сил
Особую, наиболее простую для исследования, группу стержневых систем составляют плоские системы. У плоской рамы оси всех составляющих элементов расположены в одной плоскости, которая одновременно является главной плоскостью сечений. В этой же плоскости действуют все внешние силы, включая и реакции опор.
Рамы принято разделять на статически определимые и статически неопределимые.
Под статически определимой понимается такая система, для которой все реакции опор могут быть определены при помощи уравнений равновесия, а затем при найденных опорных реакциях методом сечений могут быть найдены также и внутренние силовые факторы в любом поперечном сечении [2, 5, 6].
Под статически неопределимой системой имеется в виду такая, для которой определение внешних реакций и всех внутренних силовых факторов не может быть произведено при помощи метода сечений и уравнений равновесия.
Разность между числом неизвестных (реакций опор и внутренних силовых факторов) и числом неизвестных уравнений статики, которые могут быть составлены для рассматриваемой системы, носит название степени или числа статической неопределимости.
Наиболее широко применяемым в машиностроении общим методом раскрытия статической неопределимости стержневых и рамных систем является метод сил. Он заключается в том, что заданная статически неопределимая система освобождается от дополнительных связей как внешних, так и взаимных, а их действие заменяется силами и моментами. Значения этих сил и моментов подбираются так, чтобы перемещения соответствовали тем ограничениям, которые накладываются на систему отброшенными связями. Таким образом, при указанном способе раскрытия статической неопределимости неизвестными оказываются силы. Отсюда и название «метод сил» [2, 3].
Раскрытие статической неопределимости любой рамы методом сил начинается с отбрасывания дополнительных связей. Система, освобожденная от дополнительных связей, становится статически определимой. Она носит название

10
основной системы. Оставшиеся связи должны обеспечивать неизменяемость системы, с одной стороны, и статической определимости в узлах - с другой.
После того как дополнительные связи отброшены и система превращена в статически определимую, необходимо, как уже говорилось, ввести вместо связей неизвестные силовые факторы.
В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты.
1.3. Последовательность расчета статически неопределимой рамы
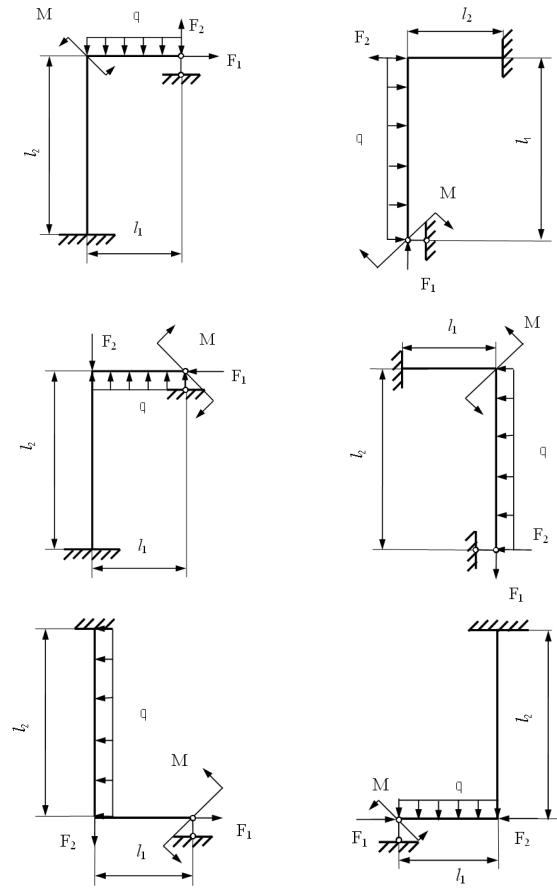
1. Схема выдается преподавателем по списку в журнале (рис. 1.2), данные выбираются по номеру зачетной книжки (или по номеру студенческого билета). Пишем последние две цифры, например, 04 – под ними буквы «де», получаем
04
де.
Из таблицы 1.1 по строчке «0» (внизу в таблице написана буква «д») –
выбираем M = 4 кн м, q = 3 кн/м и l2 = 2,8 м . |
|
|
|
|
|
|
|||||||
|
По строчке «4» (внизу в |
таблице написана буква «е») – выбираем F1 = |
|||||||||||
=7 кН, F2 = 4 кН, l1 = 2,6 м и адм = 157 МПа. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1 |
||
|
|
Данные для расчета статически неопределимой рамы |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
№ |
M, |
F1, |
|
q, |
|
F2, |
l1, |
l2, |
|
адм, |
|
|
схемы |
строки |
кН∙м |
кН |
|
кН/м |
|
кН |
м |
м |
|
МПа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выда- |
1 |
16,0 |
3,0 |
|
3,0 |
|
5,0 |
4,2 |
2,0 |
|
160 |
|
|
ется |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
15,0 |
4,0 |
|
2,5 |
|
5,5 |
3,2 |
2,6 |
|
159 |
|
|
|
препо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
14,0 |
5,0 |
|
2,0 |
|
6,0 |
2,2 |
2,4 |
|
158 |
|
|
|
дова- |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
13,0 |
6,0 |
|
4,0 |
|
6,5 |
2,6 |
2,8 |
|
157 |
|
|
|
телем |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
12,0 |
7,0 |
|
4,5 |
|
7,0 |
2,4 |
3,2 |
|
156 |
|
|
|
по |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
7,0 |
6,5 |
|
3,5 |
|
7,5 |
3,8 |
3,4 |
|
155 |
|
|
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
8,0 |
5,5 |
|
5,0 |
|
4,5 |
3,4 |
3,0 |
|
154 |
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
9,0 |
4,5 |
|
5,5 |
|
4,0 |
2,8 |
3,6 |
|
153 |
|
|
|
|
|
|
|
|
||||||||
|
жур- |
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
10,0 |
3,5 |
|
6,0 |
|
8,0 |
3,6 |
3,8 |
|
152 |
|
|
|
|
|
|
|
|
||||||||
|
нале |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
11,0 |
2,5 |
|
6,5 |
|
8,5 |
4,0 |
2,8 |
|
151 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
е |
|
д |
|
е |
е |
д |
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11
1 |
2 |
|
3 |
4 |
|
5 6
Рис. 1.2. Схемы рам (1-6)
12
7 |
8 |
9 |
10 |
|
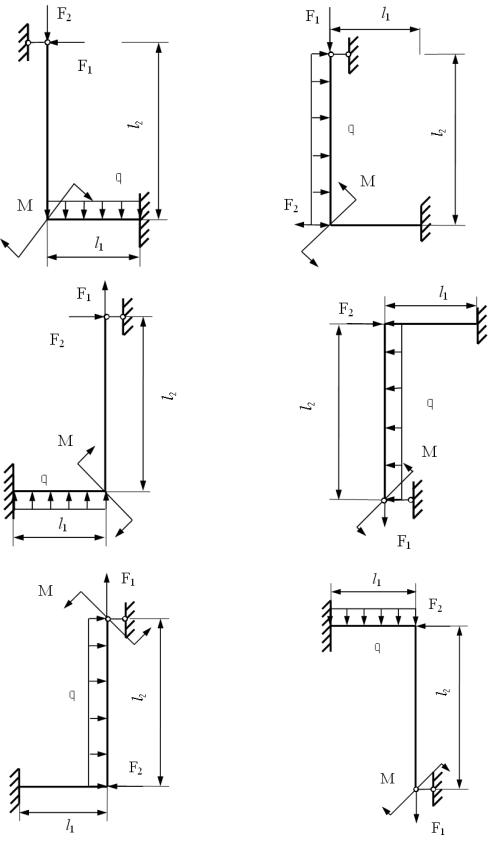
11 12
Рис. 1.2. Расчетные схемы рам (7-12)