Материал: 3Detali_Mashin_Belan_Kharchenko
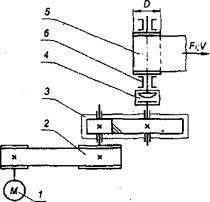
Рис.1.1. Кинематическая схема привода ленточного транспортера 1- двигатель; 2 – клиноременная передача; 3- цилиндрический
одноступенчатый косозубый редуктор; 4- муфта зубчатая; 5 – барабан; 6- опоры барабана (подшипники).
1 ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И КИНЕМАТИЧЕСКИЙ РАСЧЕТ ПРИВОДА
Двигатель является одним из основных элементов машинного агрегата. От типа двигателя, его мощности, частоты вращения и других параметров зависят конструктивные и эксплуатационные характеристики рабочей машины и еѐ привода.
Электродвигатель выбирают после определения его мощности и частоты вращения вала. Как правило, в задании на проектирование сообщают окружную силу Ft (Н) на барабане привода ленточного конвейера (или звѐздочке привода пластинчатого конвейера), скорость движения ленты или цепи V (м/с), диаметр барабана D (мм) или число зубьев zзв и шаг рзв (мм) тяговых звѐздочек.
По этим данным определяют потребляемую мощность (Вт) привода (мощность на выходе):
|
= = 5000 ∙ 1,5 = 7500 Вт. |
(1.1) |
вых |
|
|
Для учѐта потерь определяют общий КПД привода ηобщ как произведение частных значений КПД отдельных составляющих элементов, входящих в кинематическую схему привода (см. рис. 1.1). Значения КПД
5
конического и цилиндрического зубчатых зацеплений, а также отдельных звеньев кинематической цепи привода, можно принимать по табл. 1.1. как средние между предельными значениями интервалов изменения этих параметров.
КПД ремѐнной передачи ηрем =0,96;
КПД пары цилиндрических зубчатых колѐс ηцил =0,97;
КПД муфты ηмуф =0,98;
КПД |
одной |
пары |
подшипников |
качения |
|
(опоры барабана) η подш =0,99. |
|
|
|
||
Общий КПД привода: |
|
|
|
|
|
общ = рем ∙ цил ∙ муф ∙ подш |
= 0,96 ∙ 0,97 ∙ 0,98 ∙ 0,982 = 0,876, |
(1.2) |
|||
где i – число пар подшипниковых опор. |
|
||||
|
|
|
|
Таблица 1.1 |
|
Рекомендуемые значения КПД и передаточных чисел |
|||||
|
механических передач |
|
|||
|
|
|
|
|
|
Тип передачи |
|
η |
|
u |
|
Зубчатая в закрытом корпусе (редук- |
|
|
|
||
тор): |
|
|
0,96…0,98 |
|
2…6 |
-цилиндрические колеса |
|
0,96…0,97 |
|
1…5 |
|
-конические колеса |
|
|
|
|
|
Зубчатая открытая |
|
|
0,95…0,96 |
|
2…5 |
Червячная в закрытом корпусе |
|
|
|
||
при числе витков (заходов) червяка: |
|
|
|
||
Z1=1 |
|
|
0,70…0,75 |
|
16…50 |
Z1=2 |
|
|
0,80…0,85 |
|
16…50 |
Z1=4 |
|
|
0,85…0,95 |
|
16…50 |
Цепная закрытая |
|
|
0,95…0,97 |
|
1,5…5 |
Цепная открытая |
|
|
0,90…0,95 |
|
1,5…5 |
Ременная: |
|
|
|
|
|
-плоским ремнем |
|
|
0,96…0,98 |
|
2…3 |
-клиновыми ремнями |
|
0,95…0,97 |
|
2…3 |
|
Муфта соединительная |
|
0,98 |
|
- |
|
Подшипники качения (одна пара) |
0,98 |
|
- |
||
6
Требуемая мощность электродвигателя: |
|
|||||
э дв = |
вых |
= |
7500 |
= 8305,7 Вт. |
(1.3) |
|
общ |
0,903 |
|||||
|
|
|
|
|||
Частота вращения приводного вала (барабана ленточного транспортера):
вых = |
60 ∙ |
= |
60 ∙ 1,5 |
= 57,33 об/мин |
(1.4) |
|
|
||||
|
∙ 3,14 ∙ 0,5 |
|
|
||
где D - диаметр барабана, (м).
Если в исходных данных вместо диаметра барабана заданы шаг цепи зв (мм) и число зубьев звѐздочки зв , то в знаменатель дроби (см. формулу 1.4) подставляют диаметр звѐздочки D (мм), в свою очередь определяемый по формуле:
= |
зв ∙ зв |
. |
(1.5) |
|
|
Для определения общего передаточного числа привода из табл. 1.1 выбираем передаточное число клиноремѐнной передачи рем=2,5; и передаточное число цилиндрической передачи цил = 4.
Определяем общее передаточное число привода:
общ = рем ∙ цил = 2,5 ∙ 4 = 10. |
(1.6) |
Определяем частоту вращения вала электродвигателя (число обо- |
|
ротов на входе): |
|
вх = вых ∙ общ = 57,33 ∙ 10 = 573,3 об/мин. |
(1.7) |
Полученное значение должно находиться в интервале: |
|
700 ≤ вх ≤ 3000 об/мин. |
(1.8) |
Так как вх < 700 об/мин, изменяем (увеличиваем) передаточные числа клиноремѐнной и цилиндрической передач и вновь определяем общее передаточное число привода:
общ = рем ∙ цил = 3 ∙ 4,5 = 13,5.
Тогда вх = 57,33 ∙ 13,5 = 773,9 об/мин попадает в требуемый интервал (1.8).
7

Из табл. 1.2 выбираем электродвигатель мощностью, наиболее близкой к рассчитанной.
После выбора электродвигателя следует отдельно написать его полное условное обозначение, табличную мощность и асинхронную частоту вращения вала (си. табл. 1.2, параметр после условного обозначения электродвигателя, за косой чертой).
Электродвигатель АИР 160М8 ТУ 16-525564-84. Мощность двигателя Р = 11 кВт.
Асинхронная частота вращения э дв=727 об/мин.
Перегрузка асинхронных электродвигателей допускается до 8 %. При невыполнении этого условия следует принимать двигатель ближайшей большей мощности.
Таблица 1.2
Технические данные двигателей серии АИР ТУ 16-525.564-84 (числительтип, знаменательасинхронная частота вращения)
Мощность, |
|
Синхронная частота, об/мин |
|
|
P, кВт |
750 |
1000 |
1500 |
3000 |
0,37 |
- |
71A6/915 |
- |
- |
0,55 |
- |
71B6/915 |
71A4/1357 |
- |
0,75 |
90LA8/705 |
80A9/920 |
71B4/1350 |
71A2/2800 |
1,1 |
90LB8/715 |
80B6/920 |
80A4/1395 |
71B2/2805 |
1,5 |
100L8/702 |
90L6/925 |
80B4/1395 |
80A2/2850 |
2,2 |
112MA8/709 |
100L6/945 |
90L4/1395 |
80B2/2850 |
3,0 |
112MB8/709 |
112MA/950 |
100S4/1410 |
90L2/2850 |
4,0 |
132S8/716 |
112MB/950 |
100L4/140 |
100S2/2850 |
5,5 |
132M8/712 |
132S6/960 |
112B4/1432 |
100L2/2850 |
7,5 |
160S8/727 |
132M6/960 |
132S4/1440 |
112M2/2895 |
11,0 |
160M8/727 |
160S6/970 |
132M4/1447 |
132M2/2910 |
15,0 |
180M8/731 |
160M6/970 |
160S4/1455 |
160S2/2910 |
18,5 |
- |
180M6/980 |
160M4/1455 |
160M2/2910 |
22,0 |
- |
- |
180S4/1462 |
180S2/2919 |
30,0 |
- |
- |
180M4/1470 |
180M2/2925 |
Пример условного обозначения двигателя: «Двигатель АИР 100L2 ТУ 16-525.564 – 84»
При выборе необходимо учесть, что двигатели с большой частотой вращения вала (3000 об/мин) имеют низкий рабочий ресурс, а двигатели с низкими частотами (750 об/мин) весьма металлоемки.
8

Поэтому такие двигатели нежелательно применять без особой необходимости в приводах общего назначения.
Определяем фактическое передаточное отношение:
общ факт = |
э дв |
= |
727 |
= 12,68 . |
(1.9) |
|
вых |
57,33 |
|||||
|
|
|
|
В качестве передаточного механизма привода наиболее часто используют редуктор.
Редуктором называют отдельный агрегат с передачами зацепления, предназначенный для уменьшения угловой скорости и повышения вращающего момента.
Поскольку при курсовом проектировании центральным объектом является одноступенчатый редуктор, необходимо определить значения частот вращения, угловых скоростей и вращающих моментов на валах редуктора.
В любой механической передаче, в том числе и в редукторах, выделяют два главных вала: ведущий (входной) вал (в расчѐтах обозначают индексом «1») и ведомый (выходной) вал (в расчѐтах обозначают индексом «2»).
Согласно кинематической схеме (см. рис. 1.1), в данном приводе используется одноступенчатый цилиндрический косозубый редуктор, поэтому:
ред = цил = 4,5.
Уточняем передаточное число ремѐнной передачи:
рем = |
общ факт |
= |
12,68 |
= 2,82. |
|
ред |
4,5 |
||||
|
|
|
Частота вращения ведущего вала редуктора:
1 = э дв = 727 = 257,8 об/мин.рем 2,82
Частота вращения ведомого вала:
2 = |
1 |
= |
257,8 |
= 57,3 об/мин. |
|
ред |
4,5 |
||||
|
|
|
(1.10)
(1.11)
(1.12)
(1.13)
9