Материал: 3994
31
передаточная функция регулятора:
передаточная функция эталонной модели выбрана в виде:
Функции адаптера в контуре самонастройки выполняет усилитель с коэффи-
циентом усиления K3.
Содержание работы
1.Определить переходный процесс в системе без включения эталонной моде-
ли. Параметры объекта и регулятора рекомендуются следующие:
Kob =1; Tob =0.3; Кr =1; Тr =1.
Выявить зависимость качества регулирования от изменения параметров объ-
екта регулирования (Коб или Тоб), вызванных внешними возмущениями.
2. Настроить контур самонастройки на приемлемое качество самонастройки,
увеличивая коэффициент усиления контура K3.
З.Определить переходный процесс в этой же системе при включении контура самонастройки и эталонной модели с параметрами:
Kм =1; Tм =0.3;
при тех же изменениях параметров объекта, вызванных внешними возмуще-
ниями. Добиться наилучшей адаптации системы к внешним возмущениям.
Вопросы для самоподготовки:
1.Каковы основные недостатки адаптивных систем данного типа? На-
сколько легко практически реализовать данный алгоритм?
2.Как по-вашему можно реализовать усилитель с очень большим коэффи-
циентом усиления?
3.Существуют ли какие-то ограничения на параметры эталонной модели,
или их можно задавать сколь угодно малыми?
32
Лабораторная работа №5 Исследование систем с переменной структурой
Цель работы: изучение качества регулирования СПС в зависимости от пара-
метров переключаемых регуляторов и от уравнения гиперповерхности переключе-
ния
Системы с переменной структурой (СПС) являются отдельным классом адап-
тивных систем, называемым иногда самоорганизующимися системами. Управ-
ляющее устройство СПС имеет несколько структур, реализующих различные зако-
ны регулирования. В процессе работы под действием определенных команд проис-
ходит подключение к объекту этих структур в определенной последовательности. В
результате система в целом приобретает свойства, которых она не могла бы иметь при работе с фиксированной структурой управляющего устройства. Этим можно воспользоваться для существенного улучшения качества регулирования или для со-
хранения неизменным показателя качества в адаптивных системах.
Анализ работы СПС проводят методом фазовой плоскости в координатах ошибки регулирования X1 и ее производной X2. В этом фазовом пространстве вы-
деляют гиперповерхность, проходящую через начало координат и пересекающую фазовую плоскость по определенным линиям (линиям переключения). Эта гиперпо-
верхность называется гиперповерхностью переключения. Всякий раз, когда изо-
бражающая точка попадает на гиперповерхность, происходит переключение струк-
тур в управляющем устройстве. Логику переключения всегда можно подобрать так,
чтобы в результате нескольких переключений устанавливался устойчивый режим работы.
В практике синтеза СПС наиболее интересно направление по созданию искусственных гиперповерхностей, когда структуры и их параметры подбираются та-
ким образом, чтобы фазовые траектории изображающей точки в окрестности гипер-
поверхности располагались так, чтобы изображающая точка, раз попав на гиперпо-
верхность, уже не могла ее покинуть и, двигаясь по ней в соответствии с ее диффе-
33
ренциальным уравнением, приходила бы в стационарное состояние. Такой режим называют идеально СКОЛЬЗЯЩИМ, вы познакомились с ним в третьей лаборатор-
ной работе.В скользящем режиме переключение структур происходит с большой частотой, а движение изображающей точки уже не зависит от параметров переклю-
чаемых структур и определяется только уравнением гиперповерхности.
Мы рассматриваем работу объекта второго порядка, управляемого идеальным регулятором пропорционального или интегрального типа. В зависимости от свойств управляемого объекта фазовые портреты систем будут различные.
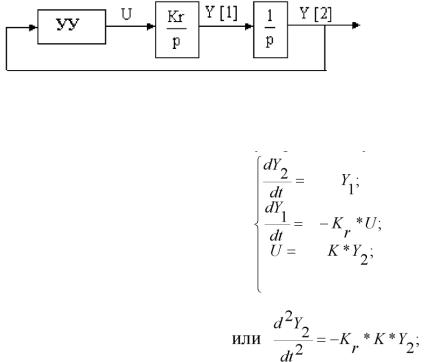
СИСТЕМА 1 состоит из астатического объекта и астатического регулятора,
следовательно в такой фиксированной структуре является структурно-
неустойчивой:
Уравнения движения системы относительно ошибки регулирования пусть имеют вид:
где Кr – коэффициент передачи регулятора;
К – коэффициент передачи управляющего устройства;
U – управляющее воздействие на входе регулятора.
Так как корни характеристического уравнения системы являются чисто мни-
мыми, то фазовый портрет представляет собой эллипс с центром в начале коорди-
нат. Направление большей полуоси эллипса зависит от коэффициента усиления ре-
гулятора.
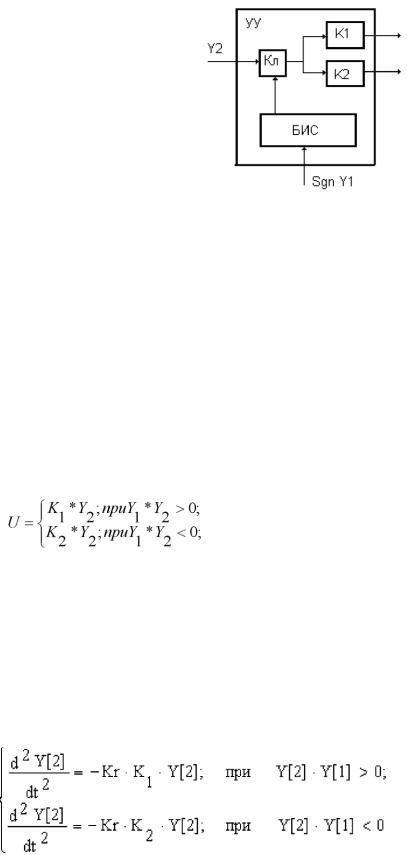
Предположим, что структура управляющего устройства имеет вид:
34
где K1 и K2 - коэффициенты усиления регулятора ( пусть K1>K2>0); Kл - управляемый ключ;
БИС - блок изменения структуры.
БИС управляет переключением структур с коэффициентами K1 и K2 в зави-
симости от информации о состоянии системы.
Допустим также, что информация о состоянии системы не является полной,
мы можем измерять только сигнал ошибки Y[2] и знак ее производной Sgn Y[1].
Тогда логика переключений структур УУ для обеспечения устойчивого режи-
ма работы должна быть такой:
то есть когда система находится в 1 или 3 квадрантах фазовой плоскости, то работает регулятор K1, а когда она находится во 2 или 4 квадрантах, то включается регулятор K2.
Линиями переключения структур будут оси координат фазовой плоскости.
Уравнения движения системы будут иметь следующий вид:
Переходный процесс в такой системе представляет собой затухающие колеба-
ния. Это видно из фазового портрета системы.
Таким образом в этой системе за счет сочетания неустойчивых структур мож-

35
но получить устойчивую структуру. Важно то, что для этого мы используем ограни-
ченную информацию о процессе. Однако качество регулирования нас не устраивает,
колебательность процесса слишком велика.
СИСТЕМА 2 имеет такую же структуру:
Уравнения движения системы относительно ошибки регулирования без учета управляющего устройства УУ имеют тот же вид:
Фазовый портрет системы, так как корни ее являются чисто мнимыми, пред-
ставляет собой эллипс с центром в начале координат. Направление большей полу-
оси эллипса зависит от коэффициента усиления регулятора.
Предположим,что структура управляющего устройства имеет тот же вид, но, в
отличие от системы 1 , мы можем измерять сигнал ошибки Y2 и знак некоторой S-
комбинации сигналов Y1 и Y2:
где С=const.
Данное выражение является уравнением прямой, проведенной на фазовой плоскости через начало координат. Назовем эту линию гиперлинией вырожденно-
го движения. Величина C определяет угол наклона линии. Эту линию и будем в данном случае считать линией переключения структур. Второй линией переключе-
ния является ось координат фазовой плоскости Y[2]=0.
Тогда логика переключений структур УУ для обеспечения устойчивого режи-
ма работы может быть иной: