Материал: 3994
26
3.Метод наискорейшего спуска.
В начальном положении F0 определяется градиент функции F, так же как при методе градиента. А затем все координаты системы изменяются пропорционально своим составляющим градиента в начальной точке. Это движение продолжается,
пока градиент регулируемой функции F по направлению движения системы m, то-
есть по направлению вектора градиента в начальной точке,не обратится в ноль:
В этом положении снова определяется направление вектора градиента и про-
исходит движение системы в новом направлении.
Таким образом, в отличие от предыдущего метода, здесь направление гради-
ента определяется только в начале каждого цикла движения. Погрешность достиже-
ния экстремума в этом методе наибольшая из трех, но этот недостаток сглаживается большим быстродействием.
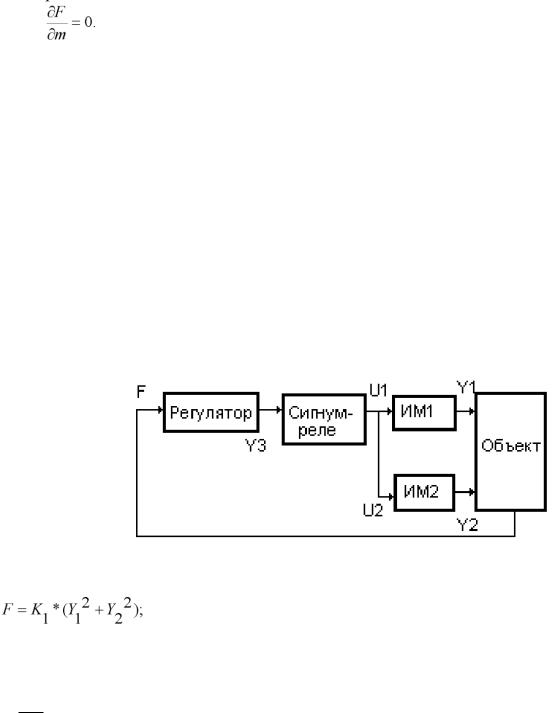
Исследуемая система экстремального регулирования обслуживает объект управления с нелинейной квадратичной статической характеристикой. Регулируе-
мая функция зависит от двух регулирующих воздействий Y1 иУ2: Уравнения сис-
темы запишем в виде:
объект:
К1 – коэффициент передачи объекта,
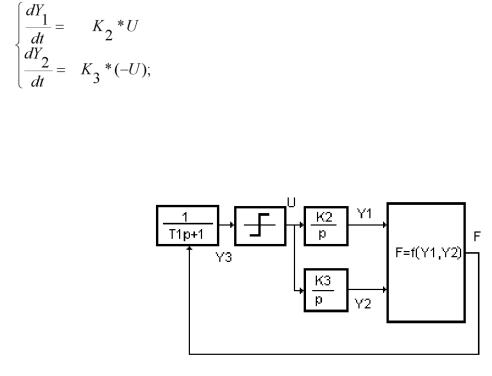
регулятор:
T1 dY3 Y3 F ; dt
Т1 – постоянная времени регулятора,
27
исполнительный механизм:
K2 и K3 – коэффициенты передачи.
Таким |
образом |
структурная |
схема |
системы |
имеет |
вид: |
Содержание работы.
1.Определить параметры переходного процесса в экстремальной системе при использовании всех трех способов движения к положению экстремума. Параметры системы для определенности рекомендуется выбрать такими:
K1 = 1; T1 = 1.0c; K2 = 1; K3 = 1. Зона нечувствительности =0.5. 2.Определить время достижения экстремума и точность достижения экстре-
мума во всех трех случаях, считая наиболее точным значением экстремума значе-
ние, определенное методом Гаусса-Зайделя.
28
Вопросы для самоподготовки:
1.Почему метод Гаусса-Зайделя называют слепым методом поиска?
2.Какой из методов поиска обеспечивает устойчивость нахождения экс-
тремума?
3.Как, по вашему, должно работать устройство поиска, обеспечивающее метод Гаусса-Зайделя?
4.А теперь постройте алгоритм работы устройства, обеспечивающего ме-
тод наискорейшего спуска. Что надо добавить, по сравнению с методом Гаусса-
Зайделя?
Лабораторная работа № 4
Самонастраивающаяся система регулирования с эталонной моделью
Цель работы: исследование качества адаптации самонастраивающейся сис-
темы (СНС) с эталонной моделью.
Необходимость применения адаптивных принципов управления возникает в тех случаях, когда диапазон изменения свойств объекта и внешних возмущений так велик, что показатели качества выходят за пределы заданных ограничений. А между тем любая неадаптивная система, работающая по принципу обратной связи, в силу этого принципа способна нейтрализовать изменения параметров объекта и среды в довольно больших пределах. И эти способности можно расширить, не прибегая к принципу адаптации.
Расширение функциональных возможностей неадаптивных систем управления с обратной связью, приближающее их по свойствам к адаптивным системам, воз-
можно:
с помощью увеличения коэффициентов усиления систем до бесконечности без нарушения устойчивости,
с помощью введения автоколебательных скользящих режимов в релейных системах,
с помощью систем с переменной структурой регулятора.
Такие системы управления называют иногда системами с пассивной адапта-
29
цией.
Самонастраивающиеся системы с эталонной моделью также являются систе-
мами с подобного рода адаптацией, использующей скользящий режим работы ре-
лейного регулятора.
Самонастраивающиеся системы с эталонной моделью фактически представ-
ляют собой безпоисковые СНС с замкнутым контуром самонастройки, но, в отличие от СНС с настраиваемой моделью, здесь сигнал самонастройки не изменяет пара-
метры настройки регулятора, как требует принцип адаптации, а формируется опре-
деленным образом и подается на вход объекта.
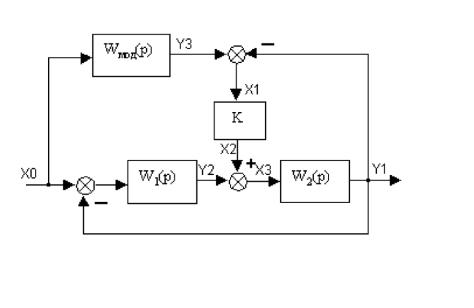
Структурная схема такой системы может быть представлена в следующем ви-
де:
Модель Wмод(p) является физическим устройством, реализованным в анало-
говом или цифровом виде, и на вход ее подаются те же воздействия, что и на объект управления. Выходы объекта и модели вычитаются и разность их (ошибка контура настройки) подается на вход объекта через усилитель с большим коэффициентом усиления K.
Хотя сигнал разбаланса контура самонастройки в этой системе не воздейству-
ет непосредственно на параметры настройки регулятора W1(p), а подается на вход объекта, можно показать, что оба эти варианта являются равносильными.
В теории СНС различают два вида моделей – настраиваемые и эталонные. При
30
настраиваемых моделях их параметры меняются в процессе идентификации до тех пор, пока сигналы с выходов объекта и модели не сравняются. Если же задается эта-
лонная модель процесса, то разность сигналов с выходов объекта и модели служит для изменения параметров регулятора, при которых качество процесса наконец ста-
нет соответствовать желаемому, заданному эталонной моделью.
Найдем передаточную функцию замкнутой системы. Уравнения звеньев, со-
гласно схемы системы, имеют вид:
Y2 = W1(p) * (X0-Y1);
Y3 = Wмод(p)* X0;
X1 = Y3-Y1;
X2 = K * X1;
X3 = Y2 + X2;
Y1 = W2(p) * X3;
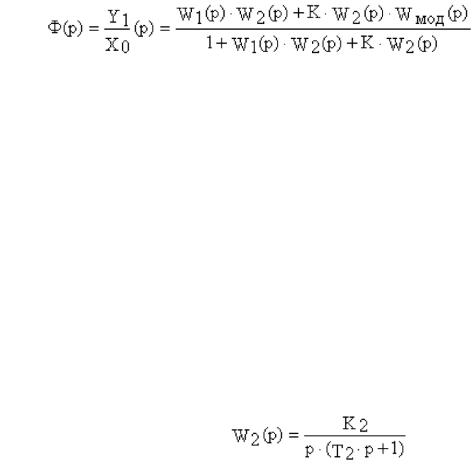
Исключая промежуточные переменные, находим передаточную функцию сис-
темы:
Eсли считать, что K=K3 достаточно велико, а лучше всего K3 стремится к бес-
конечности, тогда:
Y1 ~= Wмод(p) * X0, (2)
то есть качество переходного процесса не зависит от медленноменяющихся параметров объекта, а определяется заданной эталонной моделью Wмод(p).
Качество настройки в такой системе будет зависеть от того, насколько боль-
шим можно взять коэффициент усиления K3, чтобы не вызвать неустойчивости сис-
темы. Поэтому желательно выбрать Wмод(p) так, чтобы условия устойчивости при бесконечно большом коэффициенте K3 выполнялись.
В лабораторной работе исследуется система с эталонной моделью следующего вида: передаточная функция объекта задана: