Материал: 3568
11
преобразуется входной параметр в выходной. Схематическое изображение звена в виде блока не отражает особенностей его конструкции. Интерес представляет только связь между воздействием на вход звена и его реакцией на выходе. Такой подход позволяет создавать модели элементов самых различных природных систем, техники и имитировать их поведение, что значительно облегчает поиск эффективных методов управления.
В общем случае САУ состоит (рис. 2) из объекта управления ОУ, измерительного устройства ИУ, задающего устройства ЗУ, суммирующего устройства СУ, усилителя У и исполнительного механизма ИМ.
Рис. 2 Структурная схема САУ
ЗУ оказывает управляющее воздействие g (x) на вход системы, которое может иметь постоянную заданную величину при необходимости поддержания постоянного заданного значения управляемой величины или же изменяться по определенному закону.
Воздействие выхода системы управления на ее вход называют обратной связью. Введение обратной связи позволяет управлять при изменении параметров объекта управления и недостаточности наших знаний о его поведении. Воздействие входного сигнала на объект управления, переработка его в выходной сигнал и обратное воздействие выхода через канал обратной связи на входную величину представляет собой процессы передачи и переработки информации.
Комплекс устройств, присоединяемых к объекту управления и обеспечивающих автоматическое поддержание заданного значения его управляемой
12
величины или автоматическое изменение последней по определенному закону, называют устройством управления. Алгоритм управления сводится к следующему: измерение фактического значения управляемой величины, сравнение фактического значения с заданным, выработка управляющего воздействия. Таким образом, использование текущей информации об управляющих воздействиях и переменных на выходе систем управления позволяет создать основной класс систем управления – класс замкнутых систем управления с отрицательной обратной связью, в которых можно обеспечить достижение заданных целей управления при большой неопределенности возмущающих воздействий и изменений во времени структуры и параметров системы, за счет уменьшения чувствительности к этим возмущающим воздействиям, вариациям структуры и параметров.
Наиболее полно понятие «управление» применительно к техническим системам сформулировал академик А. И. Берг. Управление – процесс организации такого целенаправленного воздействия на объект, в результате которого объект переходит в требуемое (целевое) состояние. Более частным случаем понятия «управление» является понятие «регулирование». Регулирование состоит в достижении такой деятельности системы, при которой выравниваются все отклонения на выходе системы от заданного значения этого состояния, т.е. от нормы. Обеспечение только требуемых значений параметров, определяющих желаемый ход производственного или технологического процесса в том или ином объекте без участия человека, осуществляется системой (устройством) автоматического регулирования.
Заданное значение или норма состояния выхода системы может быть постоянной или переменной величиной. В первом случае говорят о прямом регулировании, совмещенном с управлением (в этом случае регулятор называют контроллером или управляющим устройством). Во втором случае регулирование заключается в корректировке отклонений состояния выхода системы от каждого значения переменной нормы этого состояния. Следовательно, регулирование есть выравнивание отклонений от нормы, каждое значение которой определяется управлением.
Не следует путать понятие «управление» с понятием «организация производства». Организация производства - порядок, структура и способ функционирования. Функции организации имеют отношение к объекту или
13
системе управления, характеризуя присущие ей свойства, структуру, состав, взаимосвязь и процесс взаимодействия составляющих элементов. Организация – статика производства, управление – динамика. Однако «статика» отнюдь не означает незыблемости, отсутствия движения. В более широком смысле она может означать и непрерывное циклическое повторение, жесткий регламент, режим, возвращение каждый раз в исходное состояние. Организация как форма существования системы обладает свойством динамичности, что подтверждается непрерывным процессом внедрения на предприятии новой техники, технологии, повышением уровня автоматизации управления. Организация производства и система управления тесно взаимосвязаны. На действующем предприятии совершенствование организации производства сопровождается совершенствованием системы управления, и наоборот, необходимость совершенствования системы управления вызывает первоочередное проведение работ по совершенствованию организации производства. Если не придерживаться этого условия, может возникнуть диспропорция между уровнями организации производства и системы управления.
3 ПРИНЦИПЫ УПРАВЛЕНИЯ
Объект управления подвержен воздействию различных внешних возмущений, вследствие чего управляемая величина отклоняется от заданного значения. Задачей устройства управления является обеспечение соответствия управляемой величины заданному значению путем передачи на ОУ необходимого управляющего воздействия.
Управление по заданному воздействию. Существуют САУ, управляющие только по заданному воздействию g(x), представляющему в этом случае команды программы. Такое управление называют жестким, так как при этом не учитываются действительные значения управляемой величины у(t) и возмущающего воздействия f(t) (параметры САУ и значения f(t) считаются постоянными). Подобные САУ дают удовлетворительное качество управления лишь при высокой стабильности параметров САУ и внешней среды и при невысоких требованиях к точности. По структуре эти САУ являются разомкнутыми, так как не имеют обратной связи по управляемому параметру у(f) и не образуют замкнутого контура управления.
14
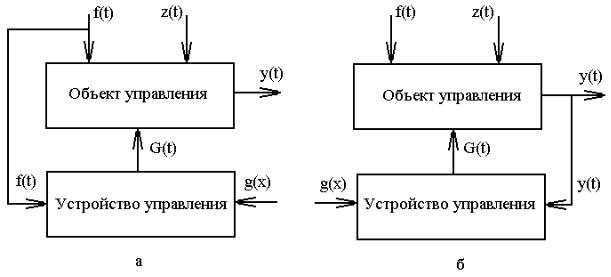
Управление по возмущению (рис.3 а) основано на принципе компенсации возмущений (разомкнутое управление) и является исторически первым принципом автоматического управления. Управляемый параметр не изменяется, а используется информация о внешнем воздействии f(t). При этом сначала выясняют, какое возмущающее воздействие является основным, а затем устанавливают, как необходимо менять значение управляемого параметра при изменении данного возмущающего воздействия, для того чтобы значение его поддерживать постоянным. Достоинство – имеется возможность полной компенсации возмущения. Недостаток – в случае преобладания неконтролируемых возмущения z(f) этот способ не дает требуемой точности.
Рис. 3 Принципы управления
Управление по отклонению (рис. 3 б). Более высокое качество управления позволяет получить замкнутые САУ, в которых используется информация об управляемой величине у(t) и задающем воздействии g(x). Сначала измеряется у(t), затем это значение сравнивается с заданным и при наличии разности (сигнала рассогласования) вырабатывается управляющее воздействие G(t), направленное в сторону уменьшения сигнала рассогласования. При этом устройство управления стремится компенсировать отклонение независимо от причин, вызвавших это отклонение. Такое управление можно назвать гибким, так как при этом учитывается действительное состояние объекта управления. Информация об у(t) передается в устройство управления, образуя контур главной обратной связи. Данный принцип иногда называют
15
компенсационным принципом Ползунова-Уатта. Он является основным для большинства современных САУ. Недостатки – затруднено управление, возникающее при разработке быстродействующих систем управления, особенно для сложных инерционных объектов. Стремление повысить точность работы такой системы и увеличить коэффициент усиления приводит к потере устойчивости. Решение – в комбинированном управлении.
Комбинированное управление. САУ, в которых используется информация одновременно о трех воздействиях: g(x), у(t) и f (t), называют комбинированными. Комбинированные САУ имеют более высокое качество управления, чем системы, работающие только по отклонению, так как информация о значении возмущающего воздействия f (f) позволяет устройству управления работать с предвидением, т. е. начинать компенсацию внешнего возмущения, нарушающего нормальную работу объекта управления, раньше, чем возникнет достаточно большое отклонение. Одновременно это дает возможность повысить точность и быстродействие системы.
4 ПРОГРАММНО-ЦЕЛЕВЫЕ МЕТОДЫ УПРАВЛЕНИЯ
Достаточным набором для построения разумного управления автомобильным транспортом как большой технической системой является информация о состоянии системы, ее цели, имеющиеся ресурсы, располагаемое системой время достижения этих целей и необходимые для этого действия. Этот набор должен расположиться и использоваться в определенной последовательности, образующей типовые этапы или технологию управления, применяемую независимо от отрасли, предприятия, характера задач. Определяют следующие основные этапы управления автотранспортом, которые можно считать типовыми:
1)Определение цели, стоящей перед управлением системой или подсистемой (отраслью, ДТП, цехом, участком, бригадой). Следовательно, постановка цели и ее реализация должны рассматриваться в рамках программ- но-целевого подхода.
2)Получение информации о состоянии системы и о внешних факторах, действующих на систему.
3)Обработка информации, оценка ее точности, представительности,