Материал: 3563
16
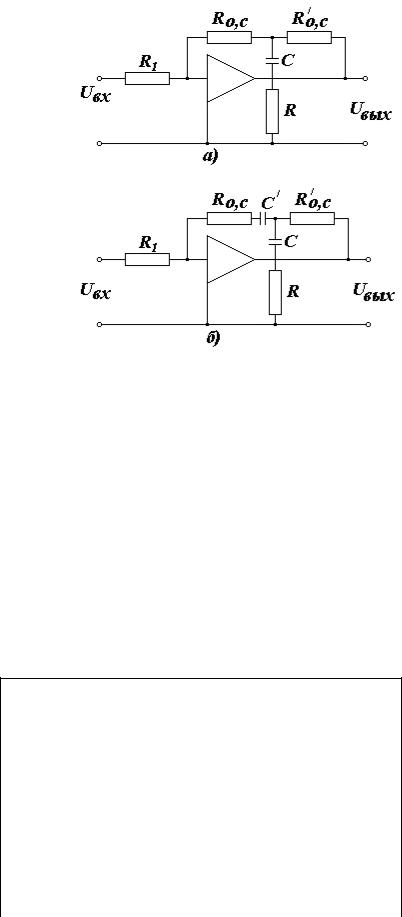
Рис. 11 Схемы ПД и ПИД – регуляторов Для управления мощным исполнительным устройством, которым являет-
ся ИД, необходимо применять усилитель сигнала датчика (непрямое регулирование). Датчик, измеряющий рассогласование между задаваемым и фактическим положением (скоростью, ускорением или другими параметрами рабочего органа), может быть выполнен на потенциометрических измерительных преобразователях (ИП), сельсинах или других датчиках, включаемых обычно дифференциальной схеме. Если управляемая величина – ток, напряжение, момент и т.д., а задатчиком является задающая рукоятка или ось, то сигнал рассогласования может быть получен с помощью различных датчиков.
Исходными данными по выбору потенциометрического датчика являются: сопротивление датчика и напряжение питания датчика, выбираемые по номеру варианта из табл. 3.
Таблица 3
Технические данные потенциометрических датчиков ПД или ПП
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Напря- |
|
|
|
|
|
|
|
|
|
|
|
жение |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
|
питания, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
В |
|
|
|
|
|
|
|
|
|
|
|
Сопро- |
|
|
|
|
|
|
|
|
|
|
|
тив- |
110 |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
190 |
200 |
|
ление, |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
Ом |
|
|
|
|
|
|
|
|
|
|
17
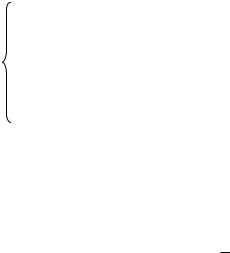
Потенциометрический датчик (рис. 12,а) углового (линейного) смещения
без нагрузки обеспечивает выходное напряжение U вых U |
Rx |
, где U – напряже- |
|
||
|
RД |
|
ние питания; Rx – сопротивление части датчика, соответствующее относительному смещению движка x (от 0 до 1); RД – полное сопротивление датчика. Иначе: Uвых U x. При наличии нагрузки выходное напряжение датчика, см. рис.12, б
U вых I |
Rx Rн |
, или U вых |
|
|
U |
|
|
|
|
Rx Rн |
, |
|
|
|
|
Rx Rн |
|
|
|||||
|
Rx Rн |
RД |
Rx |
|
|
|
Rx Rн |
||||
|
|
|
Rx |
Rн |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
а) |
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.12 |
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых |
|
|
|
|
U |
|
|
|
, или U вых |
U |
|
|
, |
(20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
RД Rx |
|
R |
2 |
|
|
|
1 1 |
|
x |
|||||
|
|
|
|
|
|
|
RД Rн |
|
|
|
||||||
|
|
|
|
R R |
R R |
R R |
x |
|
|
|
||||||
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x н |
|
x н |
|
x н |
|
|
|
|
|
|||
где x Rx |
RД ; Rн |
RД – относительное сопротивление нагрузки. |
|
|||||||||||||
а) |
б) |
|
Рис. 13 |
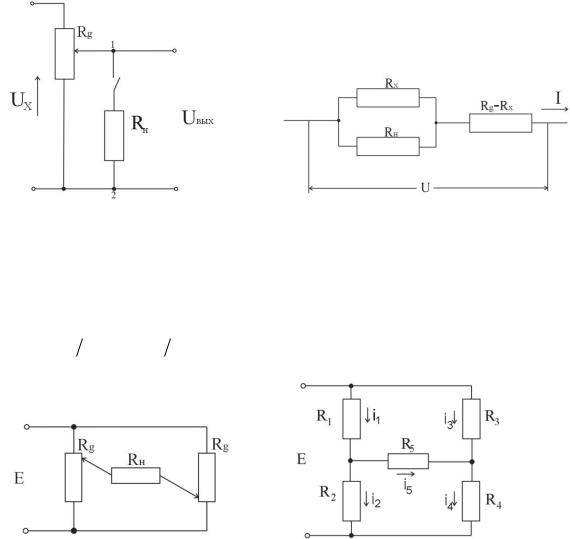
При включении датчика по схеме рис. 13,а можно изучать его работу согласно эквивалентной схеме (рис. 13,б). Обозначим падения напряжений на любом резисторе схемы R соответственно U k (k 0,1...5) . Поскольку все элемен-
18
ты – резисторы, тип компонентного уравнения U k ik Rk (закон Ома). Всего та-
ких уравнений 5. Топологические уравнения (описывающие «форму», т.е. характер соединений в схеме) представим в виде уравнений равновесия – для узлов а и б:
i1 i2 i5 0 и i3 i5 i4 0 , (21)
а также в виде уравнений совместимости – для контуров, включающих источник питания (см. схему на рис. 2,б):
U1 U 2 |
U ; U3 U 4 U и U1 |
U5 |
U3 0 . |
(22) |
||||||
Так как необходимо найти i5 (ток в нагрузке), получена система 5 уравне- |
||||||||||
ний с 5 неизвестными (i1… i5): |
|
|
|
|
|
|
|
|||
|
|
i1 i2 |
i5 |
0 |
|
|
|
|
|
|
|
|
i3 i5 |
i4 |
0 |
|
|
|
|
(23) |
|
|
|
R1i1 R2i2 U |
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
|
R3i3 R4i4 U |
|
|
|
|
|
|||
|
|
R1i1 R3i3 R5i5 0 |
|
|
|
|
|
|||
Составляя и решая матрицу коэффициентов при неизвестных, получим i5. |
||||||||||
i5 |
|
U |
R2 R3 R1 R4 |
|
|
|
. |
(24) |
||
R5 R1 |
R2 R3 R4 R1 R2 R3 R4 R3 R |
4 R1 R2 |
||||||||
|
|
|
||||||||
В задаче необходимо выполнить расчет зависимости выходного тока ИР
при неизменном среднем положении движка второго датчика (например, при заторможенном регулирующем органе, т.е. при R3 R4 12 RД ).*
Значения R1 и R2 следует принять равными R2 xRД ;* R1 1 x RД *.С учетом значений R1 R4 выражение (24) следует упростить. После упрощения выражение (24) следует рассчитать значения тока i5 при x=0; 0,1; 0,2; …; 1,0, при этом, очевидно, R5 RУУ * (входное сопротивление выбранного усилителя). Выходное напряжение Uвыхн i5 Ry , напряжение на выходе датчика на холостом ходу может быть получено путем упрощения выражения:
U |
х.х |
U |
R2 R3 |
R1 R4 |
|
|
|
U |
R2 R3 R1 R4 |
|
(25) |
||
вых |
R |
R |
|
R R |
|
|
R2 |
. |
|
||||
|
|
|
2 |
4 |
|
|
|||||||
|
|
|
1 |
|
3 |
|
|
|
Д |
|
|
||
Последнее выражение известно из теории мостовых схем.
Абсолютная методическая погрешность датчика определяется разностью выходного напряжения на холостом ходу и под нагрузкой:
U Uвыхх.х Uвыхн . |
(26) |
Порядок выполнения задания
19
1.Упростить уравнение (24) с учетом условий * , где х – относительное смещение движка датчика от нижней до верхней части датчика.
2.Рассчитать значение тока нагрузки (тока ИР) по выражению, полученному в п. 1, при х=0; 0,1; 0,2; …;1,0.
3.Рассчитать значение выходного напряжения Uвыхн i5 Ry и на холостом
ходуUвыхх.х .
4. Рассчитать значение абсолютной погрешности U преобразования датчика в зависимости от х.
Данные привести в виде таблицы
|
|
|
|
|
|
Таблица 4 |
|
|
||||
|
|
Относительное смеще- |
|
|
|
|||||||
|
Показатели |
|
ние движка, х |
|
|
|
|
|||||
|
|
0 |
0,1 |
0,2 |
0,3… |
0,8 |
0,9 |
1,0 |
|
|
|
|
|
1) Ток в нагрузке датчика, |
|
|
|
|
|
|
|
|
|
|
|
|
i5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) Выходное напряжение |
|
|
|
|
|
|
|
|
|
|
|
|
нагруженного датчика, |
|
|
|
|
|
|
|
|
|
|
|
|
U н |
|
|
|
|
|
|
|
|
|
|
|
|
вых |
|
|
|
|
|
|
|
|
|
|
|
|
3) Выходное напряжение |
|
|
|
|
|
|
|
|
|
|
|
|
датчика на холостом ходу, |
|
|
|
|
|
|
|
|
|
|
|
|
U х.х |
|
|
|
|
|
|
|
|
|
|
|
|
вых |
|
|
|
|
|
|
|
|
|
|
|
|
4) Абсолютная погреш- |
|
|
|
|
|
|
|
|
|
|
|
|
ность выходного напря- |
|
|
|
|
|
|
|
|
|
|
|
|
жения датчика, U |
|
|
|
|
|
|
|
|
|
|
|
5. Построить графики зависимостей показателей работы датчика п.п. 1-4 |
||||||||||||
таблицы в зависимости относительного смещения движка i |
, U н |
, U х.х |
, U от х. |
|||||||||
|
|
|
|
|
5 |
|
вых |
вых |
|
|||
Практическая работа №5
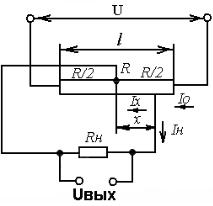
Расчет потенциометрического преобразователя со средней точкой
Дана потенциометрическая схема включения реостатного датчика с подключением сопротивления нагрузки между средней точкой сопротивления и движком потенциометра (рис. 14). Исходные данные для расчетов приведены в табл. 5.
Необходимо:
1. Определить при изменении относительного перемещения движка от
20
Рис. 14 Схема потенциометрического датчика с отводом
-0,5 до +0,5 с интервалом через 0,1: ток нагрузки Iн , выходное напряжение потенциометра Uвых при Rн ; выходное напряжение Uвых на нагрузке; мощность выходного сигнала Р, абсолютные U и относительные U погрешности нагруженного потенциометра.
2. Определить абсолютную и относительную погрешность при увеличении сопротивления нагрузки в десять раз (10 Rн ) и относительном перемеще-
нии движка 0,5. Сравнить результаты расчетов с погрешностями при заданном значении сопротивления нагрузки в той же точке и сделать выводы.
3. Построить в прямоугольной системе координат перечисленные ниже характеристики потенциометра при изменении относительного перемещения движка от -0,5 до +0,5: статическую характеристику при холостом ходе ( Rн )
Uвых0 fX , то же, при нагрузке Uвых f (X ) ; крутизну характеристики K f (X ) ; относительную погрешность U f (X ) . Результаты расчетов свести в табл. 6.
Таблица 5
Показа- |
|
|
|
Номер в а р и а н т а |
|
|
|
||||
тели |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Напряжение |
110 |
110 |
110 |
110 |
110 |
220 |
220 |
220 |
220 |
220 |
|
питания U п , В |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Сопротивление |
|
|
|
|
|
|
|
|
|
|
|
потенциометра |
300 |
100 |
200 |
400 |
400 |
200 |
200 |
150 |
400 |
600 |
|
R, Ом |
|
|
|
|
|
|
|
|
|
|
|
Сопротивление |
400 |
200 |
400 |
500 |
600 |
300 |
450 |
200 |
600 |
800 |
|
нагрузки Rн , Ом |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|