Материал: 3563
11
|
|
|
нi0 |
0,32 431 138 |
рад с , |
|
|||||||||||||
так как 262 138 , то двигатель удовлетворяет этому показателю. |
|||||||||||||||||||
5. Проверка на перегрузку: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
M |
ст |
|
J |
н |
|
|
|
|
|
|
|
|
2500 |
|
M |
|
|
|
|
|
|
|
|
J |
|
i |
|
|
|
|
||||
треб |
|
|
|
|
|
дв |
|
||||||||||||
|
|
|
i0 |
|
|
|
|
|
|
0 |
|
н |
|
|
|
||||
|
|
|
|
|
i0 |
|
|
|
|
|
|
|
431 |
|
|||||
|
5000 |
|
662 10 4 |
431 0,34 19,40Н м. |
|||||||||||||||
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
431 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отношение M тр M ном 19,40 12,5 1,55 2 , |
т.е. |
двигатель удовлетворяет условию |
|||||||||||||||||
(10) и (11). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Делаем вывод, что двигатель выбран правильно, так как он удовлетворяет условию обеспечения требуемых скорости и нагрузки.
|
|
|
|
|
|
|
Таблица 2 |
|
Тип двигателя |
Мощность на валу Pном, кВт |
Частота вращения nном, об/мин |
Напряжение питания Uном, В |
Ток якоря I, А |
Сопротивление обмотки Rя, Ом |
Момент номинальный |
Момент инерции Jд, кг·м² |
|
|
|
|
|
|
|
|
|
|
|
0,76 |
2500 |
|
8,2 |
0,237 |
2,96 |
|
|
|
0,45 |
1500 |
110 |
5,0 |
0,605 |
2,92 |
|
|
МИ- |
0,37 |
1000 |
|
4,2 |
1,46 |
3,6 |
0,013 |
|
32 |
0,76 |
2500 |
|
4,1 |
0,85 |
2,96 |
5 |
|
|
0,45 |
1500 |
220 |
2,5 |
2,38 |
2,92 |
|
|
|
0,37 |
1000 |
|
2,1 |
5,27 |
3,6 |
|
|
|
1,6 |
2500 |
|
19,2 |
0,147 |
6,25 |
|
|
|
1,1 |
1500 |
110 |
13,0 |
0,42 |
7,15 |
|
|
МИ- |
0,76 |
1000 |
|
9,0 |
1,5 |
7,4 |
0,040 |
|
41 |
1,6 |
2500 |
|
9,5 |
0,58 |
6,25 |
8 |
|
|
1,1 |
1500 |
220 |
6,4 |
1,7 |
7,15 |
|
|
|
0,76 |
1000 |
|
4,5 |
3,32 |
7,4 |
|
|
|
3,2 |
2500 |
|
36,3 |
0,06 |
12,5 |
|
|
|
1,6 |
1500 |
110 |
18,2 |
0,192 |
10,4 |
|
|
МИ- |
1,1 |
1000 |
|
12,6 |
0,435 |
10,7 |
0,066 |
|
42 |
3,2 |
2500 |
|
18,2 |
0,239 |
12,5 |
2 |
|
|
1,6 |
1500 |
220 |
9,1 |
0,75 |
10,4 |
|
|
|
1,1 |
1000 |
|
6,3 |
0,71 |
10,7 |
|
|
МИ- |
5,0 |
2500 |
|
27,2 |
– |
19,4 |
|
|
3,2 |
1500 |
220 |
17,1 |
– |
20,8 |
0,127 |
|
|
51 |
|
|||||||
1,6 |
1000 |
|
8,7 |
– |
15,6 |
|
|
|
|
|
|
|
|||||
МИ- |
7,0 |
2500 |
|
37,0 |
0,065 |
27,2 |
|
|
4,5 |
1500 |
220 |
24,0 |
0,162 |
29,2 |
0,153 |
|
|
52 |
|
|||||||
2,5 |
1000 |
|
13,1 |
0,392 |
24,2 |
|
|
|
|
|
|
|
|||||
12
Практическая работа №3
Определение передаточных функций электродвигателей
|
|
|
|
|
|
|
|
|
|
|
|
|
Теоретическая часть |
|
|
|
|||||||
|
|
|
|
|
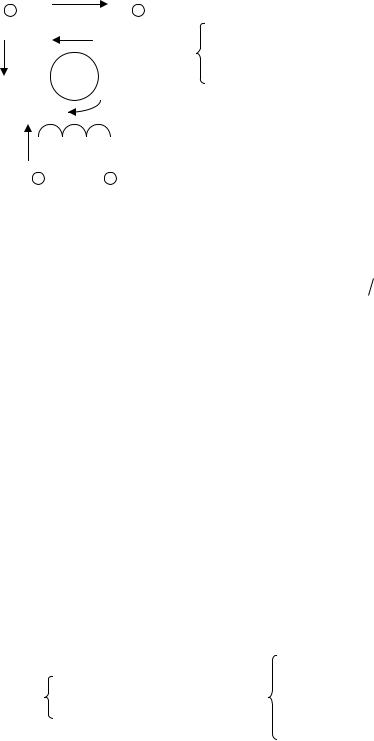
Схема включения двигателя постоянного тока независимого возбуждения |
||||||||||||||||||
+ |
|
|
|
|
U |
|
|
|
– |
Переходные процессы в двигателе описывают систе- |
|||||||||||||
|
|
|
|
|
|
|
мой уравнений: |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
E |
|
|
|
|
|
U R |
я |
I L |
dI |
E, где E c k |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
e |
e |
(12) |
||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Mдв Mст |
J |
, где Mдв cм kм I |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|||
|
|
Rя |
|
|
|
Мдв |
где U – напряжение питания двигателя; Rя – сопротивление |
||||||||||||||||
|
|
|
|
|
|
|
|
цепи якоря; I – ток якоря; L – индуктивность рабочей об- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ОВ |
||||||||||||
Iв |
|
|
|
Rв |
|
|
|
мотки; E – противо ЭДС; Mдв |
– вращающий момент двига- |
||||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
Uв |
|
|
|
|
|
теля; Mст – постоянный (статический) момент нагрузки; J – |
||||||||||||
|
|
|
|
|
– |
||||||||||||||||||
|
|
+ |
|
момент инерции двигателя; Ф – магнитный поток возбуж- |
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
дения; ce , ke , cм , kм – коэффициенты ЭДС и момента; – |
||||||||||
угловая скорость вращения двигателя. |
|
|
|
||||||||||||||||||||
|
|
|
|
|
При отсутствии значения R в расчетах можно принять |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R 0,5(1)Uном Iном |
|
|
(13) |
||||||
(определяем по номинальным значениям соответственно КПД, напряжение и ток двигателя, в случае если величина R не задана);
L c |
Uном |
|
|
, |
(14) |
2 p n |
I |
|
|
||
|
дв ном |
|
ном |
|
|
где c 6 8 (коэффициент, принимающий меньшее значение для двигателей малой мощности и большее – для двигателей большей мощности); pдв – число
пар полюсов двигателя.
|
W1(P) |
|
В дальнейшем будем рассматривать систе- |
|
U(P) |
|
му уравнений (12) с переменными в виде малых |
||
|
|
|||
Двигатель |
|
|||
|
|
|
||
|
ω(P) |
отклонений от установившегося режима: u, i. |
||
|
||||
|
постоянного |
Передаточная функция – это |
отношение |
|
Mст(P) |
|
|||
|
||||
тока |
|
|||
|
преобразования Лапласа выходного |
сигнала к |
||
Mн(P) |
|
|
||
|
|
входному. |
|
|
W2(P) |
|
|
||
|
|
|
||
Перепишем эти уравнения в операторном виде, используя символ дифференцирования p:
|
|
u |
|
u ke (Rя L p) i; |
|
|
|
или |
ke |
||
kмi Mн J p , |
|
|
|
|
i |
||
|
|
||
(Rя L p) |
M |
н |
J p |
; |
||||
|
|
kм |
ke |
|||||
|
|
|
|
|
|
(15) |
||
|
M н |
J p |
|
|
|
|
|
|
|
, |
|
|
|
|
|
||
|
|
kм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13
откуда
u
ke
|
L J |
|
ke kм |
||
|
p2 Rя J p ke kм
Rя |
|
|
|
L |
|
|
|
|
1 |
|
|
p |
Mн . |
k k |
|
R |
||||
|
|
|
|
|
||
e |
м |
|
я |
|
|
|
Находим отсюда скорость:
|
L J |
|
R J |
|
|
|
p2 |
я |
|
|
|
|||
|
|
|
ke kм |
|
ke kм |
|
|
||
|
|
u |
|
|
Rя |
|
|
|
L |
|
|
|
p 1 |
|
|
|
|
|
|
|
1 |
|
|
p |
Mн , |
k |
k |
|
k |
|
R |
|||||||
|
|
|
e |
|
|
|
|
|
||||
|
|
e |
|
|
|
м |
|
я |
|
|
||
или |
Tэ Tм p2 |
Tм p 1 k1 u k2 1 Tэ p Mн , |
|
|
|
||||||||
|
|
|
(16) |
||||||||||
откуда |
|
|
|
|
|
|
k2 1 Tэ |
p |
|
|
|
|
|
|
p |
|
|
k1 |
|
u p |
M |
|
p , |
(17) |
|||
|
T |
T p2 T p 1 |
T T p2 T p 1 |
н |
|||||||||
|
|
|
|
|
|
|
|||||||
|
|
э |
м |
м |
|
э м |
м |
|
|
|
|
||
где Tэ L Rя и Tм JRя
Rя и Tм JRя  ke kм – соответственно электромагнитная и электромеханическая постоянные времени двигателя, с; k1 1 ke – коэффициент усиления двигателя, 1/В·с; k2 Rя
ke kм – соответственно электромагнитная и электромеханическая постоянные времени двигателя, с; k1 1 ke – коэффициент усиления двигателя, 1/В·с; k2 Rя  kekм – коэффициент пропорциональности, 1/с·Н·м.
kekм – коэффициент пропорциональности, 1/с·Н·м.
Значение коэффициентов ke , kм могут быть определены по номинальным параметрам двигателя:
|
ke |
|
Uном Rя I |
|
|
и |
kм |
Mном |
|
|
Pном |
. |
|
|
(18) |
|
|
|
|
|
|||||||||||
ном |
|
|
|
||||||||||||
|
|
|
|
|
I |
|
ном I |
|
|
||||||
Передаточные функции двигателя (вход – напряжение питание или мо- |
|||||||||||||||
мент нагрузки, выход – скорость вращения) отсюда в операторном виде: |
|||||||||||||||
W1 p |
|
|
k1 |
|
|
и W2 p |
|
k2 1 Tэ p |
|
. |
|
||||
Tэ Tм |
p2 Tм p 1 |
|
Tэ Tм p2 Tм p 1 |
(19) |
|||||||||||
|
|
|
|
|
|
||||||||||
Переходной процесс для вещественных отрицательных корней будет апериодическим, для комплексных сопряженных – колебательным. В любом случае вещественная часть корней должна получиться отрицательной (затухающий характер переходного процесса).
Пример расчета
Определить передаточные функции ИД (ИД и его технические данные взять из лабораторной работы №1).
1. Коэффициент ЭДС определяем по номинальным значениям парамет-
ров:
ke |
U |
ном |
Rя I |
|
110 36,3 0,06 |
0,41 |
B с рад . |
|
ном |
262 |
|||||
|
|
|
|
|
|||
2. Коэффициент момента согласно уравнению (19):
k м |
|
M ном |
|
12,5 |
|
0,344 |
Н м А . |
|
|
|
|
|
|||||
|
|
36,3 |
||||||
|
|
I |
|
|
||||
3. Полный момент инерции двигателя:
J J дв |
J н |
0,0662 |
5000 |
0,0931 |
кг м2 . |
|
i02 |
4312 |
|||||
|
|
|
|
14
4. Электромеханическая постоянная времени двигателя:
Tм |
|
JRя |
|
|
0,0931 0,06 |
0,039 c . |
||
ke |
k |
|
0,41 |
0,344 |
||||
|
|
м |
|
|||||
5. Электромагнитная постоянная времени:
Tэ |
L |
|
c U ном |
|
|
8 110 |
|
0,081 |
c . |
|
Rя |
Rя 2 pдв nном I |
|
0,06 2 1 |
2500 36,3 |
||||||
|
|
ном |
|
|
||||||
6. Коэффициент передачи двигателя по скорости
k |
1 |
|
1 |
|
2,44 |
рад |
. |
|
|
|
|
||||
1 |
ke |
0,41 |
|
с B |
|||
|
|
||||||
7. Коэффициент передачи двигателя по моменту нагрузки:
k2 |
|
Rя |
|
0,06 |
0,42 |
рад |
|
. |
ke k м |
0,41 0,344 |
с Н |
|
|||||
|
|
|
|
м |
||||
8. Отсюда передаточные функции двигателя:
|
W p |
|
2,44 |
|
|
|
|
рад |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
0,081 0,039 p2 0,039 p 1 |
|
с B |
|
|
|||||
|
|
|
|
|
|
|||||||
W2 |
p |
|
|
0,42 1 0,081 p |
. |
|
|
рад |
|
. |
||
|
|
|
|
|
|
|
|
|
||||
0,081 |
0,039 p2 0,039 p 1 |
|
с Н |
|
||||||||
|
|
|
|
м |
||||||||
Корни характеристического уравнения вещественные отрицательные, что говорит о затухающем апериодическом характере переходного процесса. Для комплексных корней с отрицательной вещественной частью переходный процесс затухающий колебательный.
Практическая работа №4
Выбор усилителя и расчет измерителя рассогласования
|
|
Wус |
|
Wид |
|
|
|
|
|
|
|
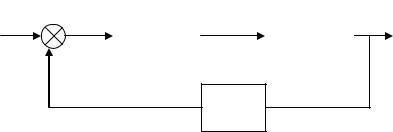
Зад |
∆Rу |
Операцион- |
Uн, Iн |
Исполни- |
|
ный усили- |
тельный |
||||
|
|
|
|||
|
Iу |
тель |
|
двигатель |
|
|
|
|
|
ИД |
|
|
|
|
|
|
ОС
Рис. 9 Структурная схема АСР
Исходными данными для выбора усилителя являются: мощность, напряжение питания и ток исполнительного электродвигателя, определенные в предыдущей части.
Операционные усилители выполняют не только функции суммирования и усиления сигнала, но и выполнение некоторых других математических операций над сигналами, поэтому суммирующие усилители в этих системах называ-
15
ют регуляторами. Используют четыре типа регуляторов: П – регулятор, ПИ – регулятор, ПД – регулятор и ПИД – регулятор.
Операционный усилитель – это усилитель с нечетным числом каскадов усиления и с большим коэффициентом усиления (Ку 1000), охваченный сильной отрицательной обратной связью и практически не имеющий дрейфа нуля.
Математические операции, выполняемые операционным усилителем, определяются видом сопротивлений обратной связи и входной цепи.
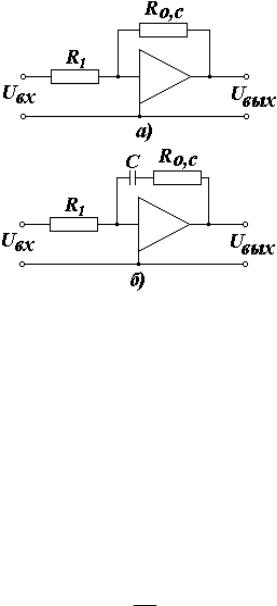
На рис. 10 приведены схемы П и ПИ – регуляторов.
Рис. 10 Схемы П и ПИ – регуляторов
Сигнал на выходе П – регулятора пропорционален входному, т.е.
Uв ых kUв х ,
где k Ro,c  R1 .
R1 .
Сигнал на выходе ПИ – регулятора пропорционален входному и интегралу от входного сигнала по времени, т.е.
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
Uв ых |
k |
|
Uв хdt kUв х , |
|
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
или в операторной форме |
|
|
|
||||||||||
W p |
Uв ых р |
|
|
1 T0 p |
|
1 T0 p |
1 |
|
||||||
|
|
|
|
k |
|
|
|
|
k |
|
; |
|||
U |
в х |
р |
T p |
T p |
T p |
|||||||||
|
|
|
|
|
|
|
0 |
|
01 |
|
01 |
|
||
k 1 ,
T01
где T0 Ro,cC; k Ro,c  R1; T01 R1C; P - оператор .
R1; T01 R1C; P - оператор .
На рис. 11 приведены схемы ПД и ПИД – регуляторов.