Материал: 2416
Номинальное значение частоты вращения ротора n2н, соответствующее расчетным значениям нагрузки, частоты и напряжения сети, указывается заводом-изготовителем на корпусе двигателя.
Для различных двигателей в номинальном режиме Sн=0,02–0,08. От величины скольжения зависит частота тока в обмотке ротора
f2=S·f1, |
(7.7) |
а также ЭДС Е2, наводимая в каждой фазе обмотки ротора, |
|
Е2=Е2к·S, |
(7.8) |
где Е2к – ЭДС при неподвижном роторе (является параметром двигателя).
Таким образом, ЭДС, наводимая в обмотке ротора вращающимся магнитным полем, прямо пропорциональна величине скольжения.
7.5. Механические характеристики асинхронного двигателя
Эксплуатационные параметры асинхронного двигателя наглядно иллюстрируются механическими характеристиками.
Механические характеристики М=f(S) и n2=f(M) могут быть рассчитаны и построены в соответствии с уравнением
|
|
3U12Ф |
R2′ |
|
|
|
||
M = |
|
S |
, |
(7.9) |
||||
|
|
|
||||||
Ω0 [( R1 + |
R2′ |
)2 |
+( X1 + X 2′ )2 |
|||||
|
|
|
||||||
S |
|
|
||||||
|
|
|
|
|
|
|
||
где М – вращающий момент; U1Ф – фазное напряжение статорной обмотки; S – скольжение; R1, X1 – значения активного и индуктивного сопротивлений статорной обмотки; R2′, X 2′ – приведенные значения
активного и индуктивного сопротивлений роторной обмотки; f1 – частота напряжения питания статорной обмотки; р – число пар полюсов;
Ω0 = 2πpf1 – угловая скорость вращения магнитного поля.
По зависимости М=f(S) легко построить характеристику n2=f(M). Для построения механической характеристики по уравнению (7.9) необходимо произвести расчет параметров электрической цепи обмоток статора и ротора. Для расчета эти данные можно найти лишь
вполных каталогах асинхронных машин.
Вэксплуатационных условиях для расчета и построения механических характеристик по паспортным данным пользуются упрощенной формулой
150
М |
= |
|
2М |
кр |
|
, |
(7.10) |
||
|
|
|
|
|
|
||||
|
S |
+ |
|
Sкр |
|
||||
|
|
|
|
|
|
|
|||
|
|
|
Sкр |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
||
где Мкр – критический (максимальный) вращающий момент, который может развивать двигатель; Sкр – скольжение, соответствующее критическому моменту.
Мкр=λ·Мн, |
(7.11) |
где λ – коэффициент перегрузки по моменту; Мн – номинальный момент двигателя.
Мн = |
9550Р2н |
[Н м] , |
(7.12) |
|
|||
|
n2н |
|
|
где Р2н – номинальная мощность двигателя на валу, кВт; n2н – номи- |
|||
нальная частота вращения ротора, |
об |
. |
|
|
|
||
|
мин |
|
|
Скольжение, соответствующее критическому моменту, |
|
||
Sкр = Sн( λ + λ2 −1 ). |
(7.13) |
||
Зная Мкр и Sкр и задаваясь значениями скольжения S в пределах от 0 до 1, по уравнению (7.10) рассчитывают и строят механическую характеристику двигателя М=f(S).
S=0, n1 1 2
Sн, n2н
3
Sкр, n2кр
S=1,0 |
|
4 |
|
|
Мн |
Мп |
Мкр |
||
|
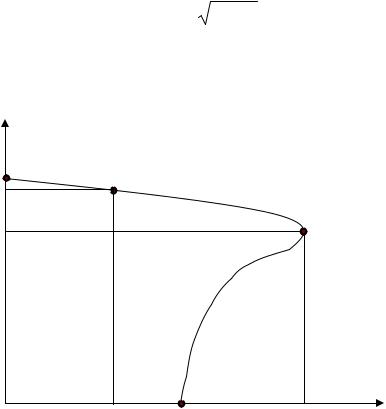
Рис. 7.8. Механическая характеристика асинхронного двигателя
Механическую характеристику n2=f(M) (рис. 7.8) можно получить из характеристики М=f(S), учитывая, что
151
n2=n1(1–S), |
(7.14) |
где n1 – частота вращения магнитного поля.
На графике механической характеристики (см. рис. 7.8) можно выделить четыре основные точки: 1) S=0, n2=n1, M=0; 2) S=Sн, n2=n2н,
M=Mн; 3) S=Sкр, n2=n2кр, M=Mкр; 4) S=1, n2=0, M=Mп (Mп – пусковой момент).
Точка 1 соответствует режиму идеального холостого хода, когда отсутствует момент сопротивления на валу двигателя, возникающий за счет полезной нагрузки, трения в подшипниках, сопротивления воздуха.
Точка 2 соответствует номинальному режиму работы двигателя. Точка 3 соответствует критическому режиму, когда двигатель развивает максимально возможный момент. При увеличении момента нагрузки двигатель выходит из рабочего режима и останавливается.
Точка 4 соответствует пусковому режиму двигателя. Ток ротора по закону Ома определяется выражением
I2 |
= |
E2 |
, |
(7.15) |
||
R22 |
+ X 22 |
|||||
|
|
|
|
|||
где Е2 – ЭДС ротора; R2 и Х2 – соответственно активное и индуктивное сопротивления обмотки ротора.
Х2, как и Е2, достигает наибольшего значения Х2к в момент пуска при S=1, т.е.
Х2=S·Х2к. |
(7.16) |
С учетом уравнений (7.8) и (7.16) выражение (7.15) примет вид
I2 |
= |
E2 |
= |
|
S E2к |
= |
E2к |
, |
(7.17) |
|||
R22 |
+ X 22 |
R22 |
+ S 2 |
X 22к |
R22 |
|
||||||
|
|
|
|
+ X 22к |
|
|
||||||
|
|
|
|
|
S 2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где Х2к – приведенное индуктивное сопротивление ротора.
Из уравнения (7.17) видно, что ток I2 достигает наибольшего значения при S=1, т.е. в момент пуска двигателя.
Линейный участок механической характеристики, на котором n2кр<n2<n1, является рабочим (см. рис. 7.8). Участок механической характеристики, на котором 0<n2<n2кр, характеризует изменение вращающего момента и частоты вращения ротора при пуске двигателя.
Механическая характеристика асинхронного двигателя при отсутствии добавочных сопротивлений в цепи ротора называется есте-
ственной.
152
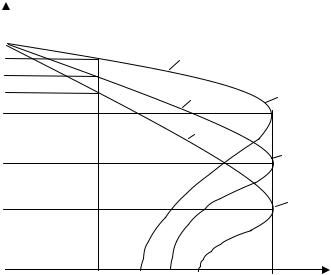
При введении в цепь фазного ротора добавочных сопротивлений механические характеристики будут искусственными (рис. 7.9).
Для искусственных механических характеристик уравнение (7.10) примет вид
М = |
|
2Мкр |
|
, |
(7.18) |
||
|
S |
+ |
Sкр.и |
|
|||
|
|
Sкр.и |
S |
|
|
|
|
|
|
|
|
|
|
||
где Sкр.и – критическое скольжение на искусственной характеристике.
Sкр.и = Sкр |
R2 + Rд |
, |
(7.19) |
|
|||
|
R2 |
|
|
где Sкр – критическое скольжение на естественной характеристике; R2 – активное сопротивление фазы обмотки ротора; Rд – добавочное сопротивление в цепи фазы обмотки ротора.
n2, S
(S=0) n1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
n2н |
|
|
|
|
|
||
n’2н |
|
|
|
|
|
|
|
n”2н |
|
2 |
|
R2 |
|||
Sкр |
|
3 |
|
|
|||
|
|
|
|
||||
S’кр |
|
|
R2+Rд1 |
||||
|
|
|
|
|
|||
|
|
|
|
|
R2+Rд2 |
||
S”кр |
|
|
|
|
|
||
|
|
|
|
|
|
||
S=1 |
|
|
|
|
|
М |
|
Mн |
Мп М’п М”п |
Мкр |
|||||
|
|||||||
Рис. 7.9. Естественная (1) и искусственные (2, 3) механические характеристики асинхронного двигателя (Rд2>Rд1)
Как видно из уравнения (7.19), с введением добавочного сопротивления возрастает Sкр.
Добавочное сопротивление в цепи ротора в соответствии с законом Ома уменьшает ток ротора I2. Но, так как, согласно уравнению (7.16), индуктивное сопротивление ротора Х2 в момент пуска (S=1) имеет наибольшее значение (cosφ2 очень мал), введение добавочного
153
(активного) сопротивления в цепь ротора приводит к значительному увеличению cosφ2 и, следовательно, согласно выражению (7.5), к увеличению пускового момента.
n2, I
n2
Iп
I
Iн
t
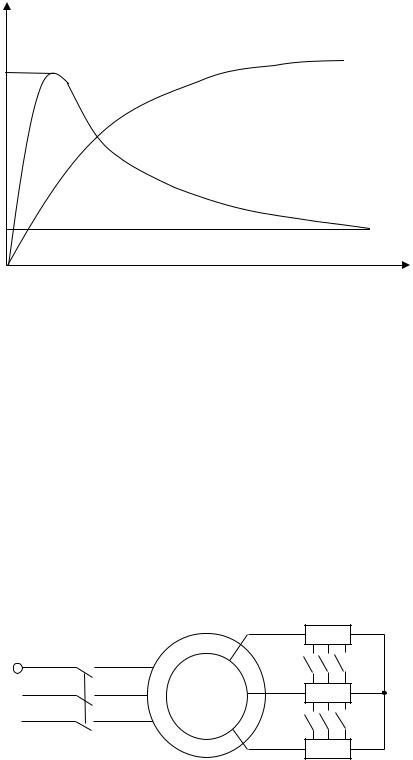
Рис. 7.10. Графики изменения тока и частоты вращения ротора при пуске асинхронного двигателя
Таким образом, при введении в цепь ротора добавочных сопротивлений уменьшается частота вращения ротора, увеличиваются скольжение и пусковой момент (см. рис. 7.9).
Асинхронные двигатели имеют небольшой пусковой момент по сравнению с двигателями постоянного тока. Для увеличения пускового момента асинхронного двигателя в цепь ротора включают добавочные пусковые сопротивления, которые по мере увеличения частоты вращения выводят из цепи ротора.
При пуске ток двигателя составляет Iп=(5–7)Iн, по мере увеличения частоты вращения ток уменьшается (рис. 7.10).
К3 К2 К1
АК
В
С
Rд
Рис. 7.11. Схема асинхронного двигателя с фазным ротором при введенных в цепь ротора пусковых сопротивлениях
154