Материал: 2385
|
|
|
|
Навигационныеданные |
|
Обработка снимков |
|
|
|
|
|
Подвижная станция |
|
Коррекция и восста- |
|
Калибровка |
|
|
новление изображений |
||||
|
|
Подвижный |
Опорная |
|
|||
|
|
|
|
|
|
||
Компенсация сдвига в |
Акселерометры |
приёмник |
базовая |
|
|||
Гироскопы |
GPS |
станция |
Стерео корреляция |
||||
ориентировании INS- |
|
|
GPS |
||||
|
|
изображений |
|||||
камеры RINS |
|
|
|
|
|||
|
|
|
|
|
|||
Компенсация сдвига в |
Данные INS |
Пропуск |
|
Определение |
|||
место положения |
Местоположение, скорость, |
цикла ? |
|
||||
INS |
INS |
|
угловые показатели |
|
|
местоположения |
|
( a |
, |
b |
) |
|
|
Новое |
объектов |
|
|
|
|
|
|
вычисление |
1. Взаимное |
|
|
|
|
|
|
неоднознач- |
|
|
|
|
|
Данные INS |
Данные GPS |
ориентирование |
|
|
|
|
|
ности |
|||
Калибровка |
|
|
2. Внешнее |
||||
|
|
|
|||||
|
|
|
ориентирование |
||||
|
|
|
|
|
|
|
3. Уравнительные |
|
|
|
|
|
|
|
вычисления |
|
|
|
|
Местоположение INS/GPS, |
|
|
модели-связки |
|
|
|
|
скорость и угловое ориентирование |
|
с использованием |
|
|
|
|
|
|
|
|
данных GPS/INS |
|
|
|
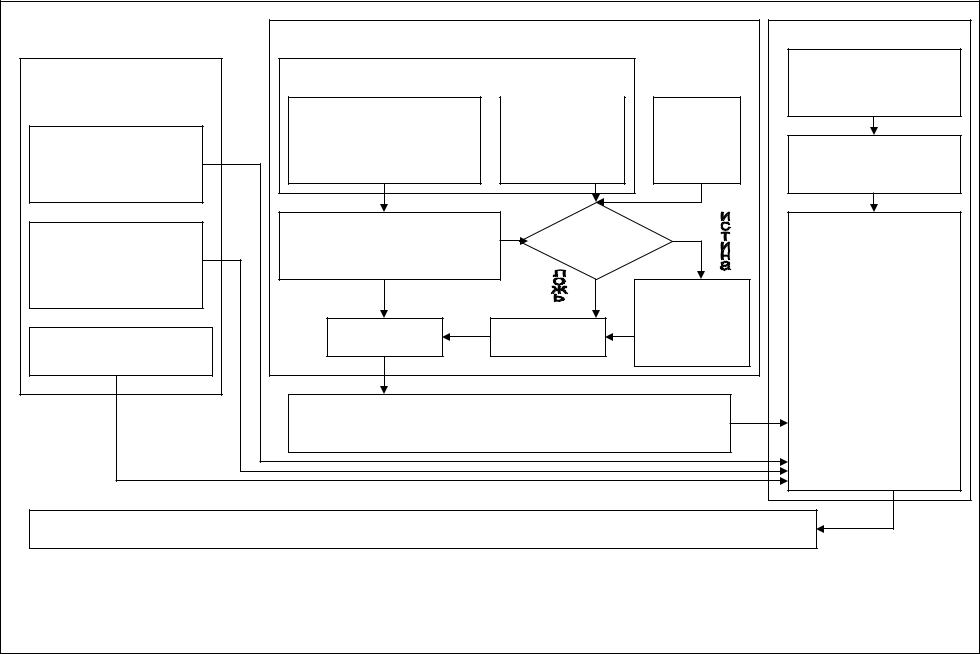
БЛОК – СХЕМА сбора и обработки данных о местоположении объектов с использованием цифровой |
||||
|
|
|
|
аэрофотосъёмки и GPS/INS - геодезической привязки |
|
||
|
Автоматическая/ Полуавтоматическая выборка объектов с известным |
|
|||||
213 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
Приложение № 2
Легкие цифровые аэросъемочные комплексы DSS
Обзор системы
Легкие цифровые аэросъемочные комплексы DSS (Digital Sensor Systems) – это цифровая интегрированная высокопрочная система для выполнения аэрофотосъемочных работ и создания ортофотомозаики. DSS включает цифровую камеру 4К х 4К, систему прямого геопозиционирования POS AV, и систему управления аэрофотосъемочным процессом. В составе цифровой камеры используется матрица CCD с размером пикселя 9 мкм, что позволяет регистрировать отдельные детали на земле размерами от 0.15м до 1 м, используя 35 и 55 мм объективы.
В основном DSS используется для создания ортофотоснимков и ортофотопланов высокого разрешения в видимом и ближнем инфракрасном диапазоне. Данные DSS могут быть непосредственно использованы коммерчески доступными фотограмметрическими пакетами для быстрого получения готовых топографических карт и планов. Ортофотоснимки создаются с использованием снимков DSS и Цифровых моделей рельефа.
Ортофотоснимки и ортофотомозаика могут использоваться в разных приложениях, включая ГИС, цифровую картографию и для обработки данных дистанционного зондирования. Например, обновление и поддержание баз данных ГИС, классификация и картографирование территорий, идентификация заболоченных земель, обновление карт землепользования, оценка урожая, подготовка инвентаризации вырубки, планирование новых мест застройки, проверка территорий на лицензии и разрешения. Многие из этих приложений имеют дело с малыми локализованными участками, коридорами и отдельными точечными снимками, что делает среднеформатную систему типа DSS подходящим инструментом для выполнения таких работ.
Технические характеристики
1. |
Камера |
|
|
Размеры матрицы |
4092 (продольный)x |
|
|
4077 (поперечный) |
|
Размер точки |
0,009 мм |
|
Линзы Zeiss |
Стандарт:55мм, 37 поле зрения (CIR/VIS) |
|
|
Опция: 35мм, 55.4 поле зрения (только VIS) |
|
Управление экспозицией |
Ручное, Приоритет диафрагмы, Приоритет |
|
|
выдержки |
|
Измерение экспозиции |
Центральное средневзвешенное, или точечное |
|
Затвор |
Фокальная плоскость электронно-управляемая |
|
Выдержки |
125-4000 (меньшие скорости не рекомендуется) |
|
Отношение |
1:1 |
|
Коэффициент заполнения |
70% |
|
Компенсация Экспозиции |
+/-2 EV с шагом 1/3 EV |
|
Максимальная выдержка |
4 сек |
|
Сенсор собственное крепление CCD, упрочненный каркас с |
|
встроенным IMU, разработан для сохранения геометрической точности 1 пиксель при ударно-вибрационных воздействиях
Калибровка Наземная и Воздушная калибровка с полным отчетом
2. Компьютерная система |
|
Накопитель данных |
Внутренний герметичный 80ГБ диск |
|
съемные 80 ГБ диски (2) |
Навигация и определение |
Интегрированная GPS/Инерциальная POS/AV |
2