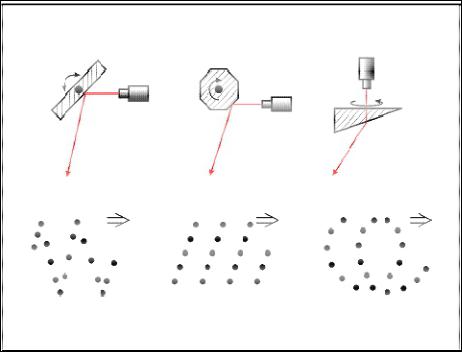
Развертка с использованием оптического клина также не отличается особой гибкостью. Кроме того, при использовании этого метода наблюдается наибольшая неравномерность распределения лазерных точек, причем минимальная плотность приходится как раз на середину полосы захвата, т.е. на ту область, которая и представляет наибольший интерес. Однако, сканирование с использованием оптического клина имеет одно важное преимущество. При реализации этого метода каждый участок полосы съемки сканируется дважды – при подлете и при отлете от этого участка. Такая особенность, во-первых, позволяет получать отклики от вертикально расположенных объектов, таких как стены здания, стволы деревьев или опоры ЛЭП, а, вовторых, создает исключительно благоприятные условия для самокалибровки лидара.
Возможность получения откликов от вертикально расположенных объектов имеется и при реализации других схем сканирования. Так в лидарах типа ALTM, использующих метод качающегося зеркала, предусмотрена возможность установки сканерного блока в наклонное положение до 30° от надира. Такое положение используется наиболее часто при съемке ЛЭП.
Также следует упомянуть о волоконно-оптическом методе развертки, предлагаемой компанией
TopoSys.
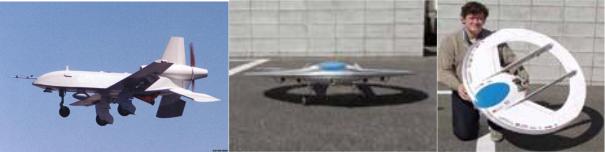
Глава 12 БЕСПИЛОТНИКИ– ПЕРСПЕКТИВНОЕ СРЕДСТВО
ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ 1. Обзор информации о БПЛА
В наиболее развитых странах мира заметна тенденция расширения использования беспилотных летательных аппаратов (БПЛА) самых различных классов и назначения в первую очередь для военных целей, изначально для разведки. По оценкам американских экспертов, активно занимаются проблемами создания БПЛА около 45 стран.
По состоянию на начало 2001 г. 53 фирмы в 13 странах разрабатывали и выпускали БЛА 143 типов. Практически все развитые страны в той или иной степени занимаются этой проблемой.
В ИНОСТРАННОЙ военной и технической литературе конца XX в. для определения всего множества беспилотных летательных аппаратов (БЛА) используется термин UAV (Unnamed Air Vehicle), под которым принято понимать дистанционно пилотируемые и автономно (программно) управляемые ЛА. Известные проекты БЛА разработаны или разрабатываются в большинстве своем для выполнения задач разведки (включая наблюдение и обнаружение целей), хотя просматривается наращивание усилий для выполнения ряда других задач. В настоящее время беспилотные системы не только дополняют пилотируемые платформы, но и начинают выступать в качестве альтернативы последним.
Появилась классификация многочисленных систем БПЛА по следующим основным критериям:
-в зависимости от массы: микро - менее 5 кг, мини - менее 200 кг, и макси - свыше
1000 кг;
-в зависимости от продолжительности нахождения в воздухе: менее 1 часа, до 3 часов, до 6 часов, до 12 часов, до 24 часов и более;
-в зависимости от высоты полета: до 1 км, до 3 км, 9-12 км, до 20 км.
Важную роль играет, естественно, и способ управления аппаратом. Здесь есть телеуправляемые и радиоуправляемые системы, совершающие полеты по заранее разработанной программе и в связке с космическими системами навигации. Есть БПЛА поля боя, оперативного и фронтового назначения, а также континентального и межконтинентального применения.
Беспилотники обладают широким набором характеристик, которые позволяют им