тангажу и рысканию. Эти значения, однако, не могут быть использованы непосредственно в искомом уравнении связи по следующей причине. Специфика работы навигационного компьютера и в частности IMU определяет его работу только в общемировой СК земного эллипсоида WGS -84, но не в ортогональной топоцентрической СК.
Исходя из описанных особенностей навигационного обеспечения процесса сканирования, перейдем к выводу уравнения связи. Главной целью здесь является переход
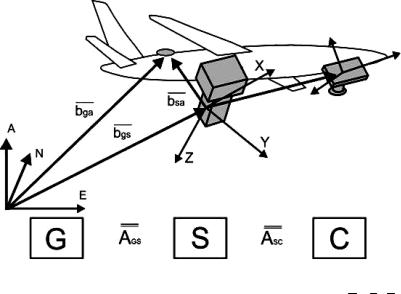
к положению, когда в любой момент времени однозначно определены вектор bGS ,
определяющий текущее положение сканера и матрица ориентации AGS . Такой переход возможен исходя из следующих соображений:
За счет использования специальных математических приемов, изложенных ниже, можно говорить о наличии непрерывных во времени данных по траектории носителя
иуглам ориентации. Таким образом, можно считать, что каждое первичное лазернолокационное измерение обеспечено соответствующими данными.
За счет рассматриваемой в предыдующих разделах процедуры измерения
выставочных параметров сканерного блока всегда возможен переход от вектора bGA ,
который есть результат непосредственного GPS измерения, к вектору bGS , определяющего
положение точки центра сканирования.
Корректный пересчет углов ориентации R * , P * , H * из СК Земного эллипсоида в углы R , P , H СК ОNEA всегда возможен с применением методик, изучаемых
вкурсе математической картографии.
Сучетом вышеизложенного вернемся к уравнению связи (11.1):
Предполагается, что векторs представляет результат единичного дальномерного измерения, т.е. значение наклонной дальности и направление зондирующего луча. Наличие
определенных bGS и AGS позволяет перейти к картографическим координатам точки
отражения g , т.е. выполнить главную задачу сканирования.
Матрица AGS может быть определена через величины направляющих косинусов, т.е.
через разложение орт СК сканера ОXYZ по базису обобщенной СК ОNEA .
|
|
|
|
NX |
NY |
NZ |
|
|
|
|
= |
E |
|
E |
|
E |
|
(11.9) |
A |
X |
Y |
|
GS |
|
|
|
|
Z |
|
|
|
|
|
|
|
AY |
|
|
|
|
|
|
|
AX |
AZ |
|
Представим схему интерпретации величин и знаков углов R , P , H так, как это принято в авиационном дистанционном зондировании (Рисунок 11.14).
W
Рисунок 11. 7 К определению знаков углов R , P , H
Для формального определения углов введем несколько вспомогательных объектов:
Оs1 X1 – проекция вектора Оs X на горизонтальную плоскость ОNE.