Материал: 2385

блоков, называемых корреляторами. В ее основе лежит понятие образа – произвольной по форме и размерам области снимка вместе со всей имеющейся информацией. С математической точки зрения образ представляет собой многомерный вектор R как совокупность элементов изображения (пикселов), каждый из которых характеризуется своим положением и оптической плотностью ij согласно (6.6).
Опознавание точки левого снимка на правом сводится к определению некоторого образа R на левом снимке и поиску на правом снимке такого образа R , чтобы расстояние между ними было минимальным:
R – R =min. |
(6.7) |
Практически для автоматического опознавания точки необходимо:
1.Выбрать на левом снимке образ R в виде области размером n n пикселов, в центре которой размещена опознаваемая точка (рис. 6.10), и определить его характеристики, на основе которых будет выполняться проверка условия (6.7).
2.Определить зону поиска размером m m пикселов (m n) вероятного расположения
искомойточки на правом снимке (рис. 6.10)с координатами центра xп xл bсн, yп yл.
3.Последовательным перемещением области размером n n пикселов в границах зоны поиска размером m m создать на правом снимке серию образов R и определить характеристики каждого из них с целью проверки условия (6.7).
4.Сопоставить характеристики каждого образа R с характеристикой-эталоном вектора R. Искомая точка на правом снимке будет расположена в центре образа R , для которого выполняется условие (6.7).
Установление степени соответствия векторов R и R представляет основную трудность и может быть выполнено различными путями. Например, один из них основан на расчете для образа-эталона R и каждого образа R правого снимка ковариационной матрицы
c |
c |
c |
|
|
11 |
12 |
13 |
|
(6.8) |
C c21 |
c22 |
c23 |
, |
|
c |
c |
c |
|
|
31 |
32 |
33 |
|
|
где
c11 k (xi x0 )2, c22 k (yi y0 )2 ,
c33 k ( i 0 )2,
c12 |
c21 k (xi |
x0)(yi |
y0 ), |
x0 |
xi |
/N |
|
c13 |
c31 k (xi |
x0 )( i |
0), |
y0 |
yi |
|
|
/N |
, |
||||||
c23 c32 k (yi |
y0)( i |
0 ), |
0 |
i |
|
||
/N |
|
||||||
k 1/(N 1), |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
N – число элементов в образах R и R ; xi, yi, i – координаты элементов образа и их оптические плотности.
Если C0 – ковариационная матрица (6.8) образа R на левом снимке, то условие (6.7) будет выполненным для вектора R , для которого разность матриц V=C0–Ci минимальна.
Более широко применяется метод идентификации точек снимков, основанный на расчете коэффициентов корреляции между оптическими плотностями элементов образа R и каждого из образов R на правом снимке с использованием формулы:
|
|
|
( i |
0 )( i 0 ) |
|
|||||
r |
|
|
||||||||
|
|
|
|
|
|
|
, |
(6.9) |
||
|
|
|
|
|
|
|
||||
|
|
|
( i |
0 )2 ( i 0 )2 |
|
|||||
97
где 0 и 0 – средние оптические плотности элементов зон (фрагментов), соответствующих образам левого (R) и правого (R ) снимков.
Коэффициенты, подсчитанные для сочетаний образа R со всеми образами R , образуют корреляционную матрицу: максимальное значение ее элемента соответствует наиболее тесной связи оптических плотностей сравниваемых участков левого и правого снимков, и, следовательно, выполнению условия (6.7). Так что искомая точка лежит в центре образа R с максимальным коэффициентом корреляции.
Некоторые способы предполагают отыскание искомой точки по максимуму корреляционной функции, составленной на основе анализа элементов корреляционной матрицы с частными коэффициентами корреляции (6.9), соответствующей искомому образу R .
Размер области снимка, отождествляемой с образом R, обычно составляет 20 20 пикселов; при малом числе контуров местности он увеличивается до 40 40 пикселов. Программы обработки обычно запрашивают полуразмер корреляционной матрицы (образа
R).
Размер области поиска на правом снимке выбирается таким, чтобы он был в два раза больше ожидаемого смещения точки из-за влияния рельефа местности. Так, при высоте фотографирования H=2000 м, максимальном превышении рельефа над средней плоскостью h=50 м и расстоянии от центра снимка до угла рабочей площади r=100 мм (формат кадра 23 23 см) будем иметь h=2,5 мм, а размер области поиска – 5 5 мм.
Рассмотренные варианты установления степени соответствия образов R и R далеко не единственные: в специальной литературе имеются упоминания о методе иерархической релаксации (методе пирамид HRC), методе вертикальной линии (ULL), методе динамического программирования и тому подобное. Некоторые из них основаны на анализе тех или иных признаков, характеризующих выделенные по группе пикселов элементы – их форму, взаимное расположение, ориентировку и другие. Однако все методы идентификации точек объединяют два обстоятельства:
отождествление выполняется на основе более или менее строгого анализа элементов изображений – их оптических плотностей и геометрического положения;
корреляторов, обеспечивающих 100-процентную гарантию качества автоматической идентификации точек, не существует.
Эти |
обстоятельства |
предопределяют |
|
|
|
|
|
|
|
|
|
|
целесообразность стереоскопического контроля поло- |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
жения измерительной марки после работы коррелятора. В |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
большинстве случаев опытный наблюдатель ее обяза- |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
тельно чуть-чуть подправит по высоте. |
|
|
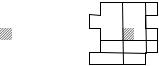
Рис. 6.11. Геометрическое |
|||||||||
Искажения |
точек, вызванные |
влиянием угла |
|
|||||||||
наклона снимка |
и рельефа местности, вызывают |
положениеэлементов образа R на |
||||||||||
правом снимкеискажается
смещения отдельных элементов растра, и это не может не сказываться на качестве идентификации.
Так, если на левом снимке образ R всегда представлен квадратом, то на правом снимке (рис. 6.11)из-за влияния угла наклона и рельефа местности соответствующие элементы образа R получают смещения, и в общем случае образуют многоугольник. Поскольку анализируемый образ R геометрически не всегда подобен образуR, то вероятность полного совпадения искомой точки уменьшается. Еще более сложная ситуация возникает в случае, если изображения левого и правого снимков развернуты одно относительно другого.
98
Однако из-за малости элементов изображения эти искажения не столь значительны, а их влияние можно компенсировать геометрической коррекцией положения пика корреляции и соответствующей ему точки правого снимка. Одно из таких решений основано на том, что смещения элементов образа являются следствием неровностей рельефа в пределах соответствующего участка местности и интерпретируются как параллактические смещения.
7. Фотограмметрическая обработка
цифровых снимков
Основная задача фотограмметрии – определение формы, размеров и пространственного положения объектов местности – при использовании цифровых изображений решается путем определения координат этих объектов или их элементов с применением рассмотренных ранее аналитических способов. Важнейшей их особенностью является объединение вычислительной обработки (внутреннее, взаимное, внешнее ориентирование и т. п.) со сбором нужной для этого информации – измерением координат необходимых точек и автоматической их идентификацией на смежных снимках. Это обстоятельство в сочетании с максимальной автоматизацией технологических процессов делают цифровую фотограмметрическую обработку высокоэффективной и технологичной, не требующей высокой квалификации исполнителей.
Ниже рассмотрены некоторые элементы вычислительной обработки цифровых снимков, аналогичные процессам аналитической обработки данных в Главе 5.
1. Внутреннее ориентирование снимков
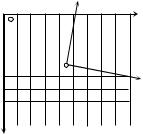
Внутреннее ориентирование цифровых изображений (снимков) выполняется с целью установления соответствия между координатными системами растра oPxPyP и снимка oxy
(рис. 12). |
|
|||
|
|
Математическая модель внутреннего ориентирования цифрового изображения |
||
аналогична применяемой |
при аналитическом построении сетей фототриангуляции и |
|||
op |
y |
предполагает определение параметров ортогонального, аф- |
||
|
xp |
финного или проективного преобразования по избыточному |
||
|
||||
|
|
|
||
|
|
|
||
|
|
|
|
числу измерений, методом наименьших квадратов. Так, |
|
|
|
|
|
|
|
|
x |
наиболее часто применяемые аффинные преобразования |
|
|
|
||
oоснованы на использовании следующих формул связи исходных (xPyP) и преобразованных (x,y) координат:
yp |
|
|
|
|
x |
|
|
a |
|
|
a a |
|
|
xp |
|
a |
|
|
xp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
y |
|
|
|
0 |
|
1 |
|
2 |
|
yp |
|
|
0 |
P |
yp |
, |
(6.10) |
Рис. 6.12. Координатные |
|
|
|
b0 |
|
b1 |
b2 |
|
|
b0 |
|
|
|
|||||||||
системы снимка (oxy) и |
где ai и bi |
(i=0,1,2) – коэффициенты |
|
аффинного |
||||||||||||||||||
|
|
растра (opxpyp) |
|
|||||||||||||||||||
|
|
|
|
преобразования, определяемые из решения системы уравнений |
||||||||||||||||||
поправок, составленных по результатам измерения координат оптических меток снимка. Линейные координаты xP ,yP точек снимка в системе oPxPyP связаны с
геометрическим разрешением растра ( ) и номерами столбцов (iX) и строк (iY) простыми зависимостями:
x |
p |
i |
X |
, |
|
i |
X |
x |
p |
/ , |
|
||
|
|
|
|
и |
|
|
|
|
(6.11) |
||||
y |
|
i |
|
|
|
i |
|
y |
|
/ |
|
||
p |
Y |
|
|
Y |
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
Для обратного преобразования координат точек из системы oxy в систему растра oPxPyP используются формулы
99
xp |
|
A |
A |
|
|
x a |
|
P 1 |
x a |
|
, |
(6.12) |
yp |
1 |
|
2 |
|
0 |
|
0 |
|||||
|
B1 |
B2 |
|
y b0 |
|
y b0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где P и P-1 – прямая и обратная матрицы аффинного преобразования. Последовательность внутреннего ориентирования в современных цифровых
фотограмметрических системах сводится к следующему.
Оператор выполняет идентификацию первых двух координатных меток (крестов), для чего наводит на них измерительную марку и выполняет регистрацию координат в системе oPxPyP. После этого программа выполняет расчет положения последующих координатных меток (крестов) и подводит к ним измерительную марку, а оператор выполняет необходимые уточнения и регистрацию координат точки. По завершению измерений всех меток программа запрашивает метод преобразований, выполняет расчет параметров и выводит расхождения между эталонными и вычисленными координатами меток (крестов). В случае несоответствия полученных расхождений требуемым нормативными документами (8–10 мкм) оператор может повторитьвсе выполненные измерений или ихчасть.
Внутреннее ориентирование остальных снимков выполняется в автоматическом режиме, для чего оператор определяет прямоугольную область метки, область ее поиска, допустимый коэффициент корреляции и величину расхождения эталонных и вычисленных координат.
Снимки, для которых автоматическое внутреннее ориентирование завершилось неудовлетворительно, обрабатываются оператором вручную.
2. Выбор точек и построение фотограмметрических моделей
Последующая фотограмметрическая обработка снимков включает:
перенос на изображения опорных точек с известными координатами X, Y, Z в системе местности;
ввод элементов внешнего ориентирования снимков XS, YS, ZS, , , (при их наличии);
выбор связующих точек в зоне поперечного перекрытия, необходимых для связи смежных маршрутов;
выбор связующих точек в зоне тройного продольного перекрытия, используемых для связи смежных моделей маршрута;
выбор точек для подписи на карте высот, урезов вод и др., в соответствии с требованиями действующих нормативных документов;
выбор дополнительных точек в шести стандартных зонах для повышения точности взаимного ориентирования и соединения смежных моделей.
Все точки, положение которых не может быть произвольным (опорные, связующие, урезы вод и др.), наносят только на один снимок; перенос их на другие снимки того же или смежного маршрута выполняют либо в стереорежиме, либо с помощью коррелятора.
Точки, положение которых на снимке не является жестким (например, дополнительные точки в стандартных зонах для определения элементов взаимного ориентирования, или в зонах тройного продольного перекрытия для связи смежных моделей) могут быть нанесены на снимки автоматически, по заданному размеру стандартной зоны и число точек в ней.
Настройка параметров коррелятора является одним из важных элементом фотограмметрической обработки. При этом определяют размер корреляционной матрицы (образа), возможность его автоматической подстройки при малом числе контуров, а также геометрической коррекции положения искомой точки в случае рельефной местности. Контроль работы коррелятора в стереорежиме является обязательным элементом
100
фотограмметрической обработки любых снимков, поскольку качество отождествления точек определяет качество выполнения всех последующих операций.
Номера столбцов (iX) и строк (iY) пикселов растра с намеченными точками преобразуются в линейные координаты в системе oPxPyP, а затем – по формулам 10 и параметрам аффинного преобразования – в систему координат плоскости прикладной рамки аэрокамеры oxy (рис. 6.12) и исправляются поправками, учитывающими влияние:
кривизны Земли и атмосферной рефракции;
дисторсии объектива съемочной камеры путем интерполяции соответствующих величин по точкам ее определения или применением соответствующего полинома;
искажений сканера интерполяцией поправок по данным поля его искажений или по полиномам;
После выбора точек выполняют взаимное ориентирование снимков строгим способом, с применением метода наименьших квадратов. Критерием качества отождествления точек на смежных снимках является среднее квадратическое значение остаточного поперечного параллакса, величина которого не может превышать 10 мкм. Более значительные расхождения свидетельствуют о наличии ошибок, прежде всего, в отождествлении точек. Их устранение требует проверки качества отождествления и измерения точек в стереорежиме. Менее вероятны ошибки внутреннего ориентирования изображений и паспортных данных съемочной камеры (фокусного расстояния, координат главной точки и др.).
Для повышения точности взаимного ориентирования и надежности определения неизвестных в каждой стандартной зоне намечают по две – четыре точки (желательно контурных, надежность измерения которых несколько выше); часть таких точек должна располагаться в зонах тройного продольного и поперечного перекрытий. Важным условием достижения оптимальной точности взаимного ориентирования является одинаковое число точек в стандартных зонах.
Перечисленные операции завершаются построением одиночной модели и подориен-
тированием ее к предыдущей или к последующей. Полученные при этом разности координат связующих точек смежных моделей маршрута позволяют судить о качестве их измерения и отождествления. Величины таких расхождений не должны превышать 15 мкм в плане и 15(f/b) мкм по высоте.
3. Построение и уравнивание фототриангуляционной сети
Построение фототриангуляционной сети в пределах маршрута или блока выполняется в автоматическом режиме с использованием рассмотренных ранее методов. Задача оператора на этом этапе фотограмметрической обработки сводится к выбору методы уравнивания (независимые или полузависимые модели, уравнивание маршрутов, подблоков, связок проектирующих лучей и т. п.), а также определению критериев для подготавливаемого программой отчета. Критерием качества построения и уравнивания фотограмметрической сети служат величины расхождений исходных и найденных по результатам уравнивания координат, которые не должны превышать:
для опорных точек, по которым выполнено внешнее ориентирование – 0,2 мм в масштабе создаваемого плана в плановом положении и 0,15 сечения рельефа по высоте;
для контрольных опорных точек – не более 0,3 мм в масштабе создаваемого плана и 0,1–0,25 м по высоте при сечении рельефа 0,5–1,0 м;
связующих точек смежных маршрутов – не более 0,5 мм в масштабе создаваемого плана (карты).
Надежность уравнивания фотограмметрического блока повышается, если число использованных опорных точек в полтора – два раза превышает минимально необходимое.
101