Материал: 2385
4. Источники цифровых изображений
Цифровые изображения получают двумя способами, один из которых предполагает сканирование аналоговых фотоснимков (аэронегативов), полученных в процессе аэрофотосъемки, а второй – использование цифровых съемочных систем (сенсоров) непосредственно в процессе съемки. В обоих случаях цифровое изображение формируется с помощью либо фотодиодов, либо приемников с зарядовой связью (ПЗС) в форме ПЗС-
матрицы или ПЗС-линейки с примерно одинаковыми техническими возможностями. Применение ПЗС-матрицы предполагает формирование всего кадра изображения по схеме, аналогичной фотокамере, где в фокальной плоскости вместо фотопленки располагается ПЗС-матрица. Применение ПЗС-линейки предполагает сканирование местности или изображения параллельными маршрутами с шагом, равным размеру элемента геометрического разрешения.
Сканирование фотоснимков выполняется с помощью оптико-электронных приборов – сканеров, которые по принципу исполнения можно разделить на роликовые, планшетные и барабанные, а по точности и назначению – на офисные и фотограмметрические.
Роликовые сканеры имеют малый формат, неподвижную считывающую головку и низкую точность. Планшетные сканеры – более точные, но низкоскоростные; столбцы и строки изображения задаются перемещениями источника света и считывающей головки. Барабанные сканеры не без оснований считаются наиболее точными; строки формируемого изображения задаются вращением барабана, а столбцы – перемещением считывающей головки.
Офисные сканеры характеризуются относительно низким геометрическим разрешением (от 10 мкм с использованием фотодиодов до 100 мкм на основе ПЗС-линеек), существенными геометрическими ошибками положения элементов растра и используются для сканирования фотоснимков только в исключительных случаях.
Фотограмметрические сканеры характеризуются высоким геометрическим разрешением (не менее 10 мкм при использовании ПЗС-матриц и ПЗС-линеек) и высокой геометрической точностью, определяемой величиной ошибки сканирования и повторяемостью (изменением ошибки в десяти сканированиях). С их помощью можно сканировать черно-белые (штриховые) или цветные снимки. Технические характеристики некоторых наиболее распространенных фотограмметрических сканеров приведены в табл. 6.2; наличие 24-х уровней квантования обеспечивает получение цветного изображения (3 канала по 8 бит).
|
|
|
|
Таблица 6.2 |
Наименование |
|
Характеристика |
|
|
Характеристики |
|
фотограмметрического сканера |
|
|
|
ОАО |
«Дельта», |
СКФ-11. |
DSW500 |
|
«Пеленг», РБ |
Украина |
Россия |
LH System |
Размер снимка, мм |
300 400 |
300 450 |
300 300 |
260 260 |
Размер пиксела, мкм |
5 |
8 – 128 |
8 |
9 |
Ошибка сканирования, мкм |
2 |
3 |
3 |
2 |
Число уровней квантования, бит |
3 8 =24 |
3 8 =24 |
3 8 =24 |
1 10 |
Некоторые фотограмметрические сканеры (например, «Дельта» и др.) предусматривают возможность сканирования аэронегативов с неразрезанного аэрофильма, как это практикуется в фотограмметрическом производстве.
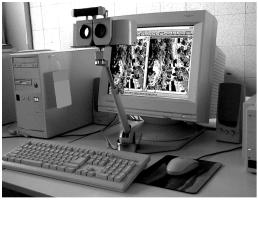
Затраты времени на сканирование характеризуются следующими данными для сканера «Дельта» (рис. 6.6): черно-белый снимок формата 23 23 см с геометрическим разрешением 8 мкм сканируется за 12 минут, а с геометрическим разрешением 30 мкм – за 4 минуты. Для получения цветного растрового изображения того же формата и с той же
92
Рис. 6.6. Фотограмметрический
сканер «Дельта» (Украина)
геометрической точностью требуется 30 и 9 минут соответственно.
Важнейшим элементом формирования цифрового изображения является эталонирование сканера, особенно в случае, если он не является фотограмметрическим. Сущность эталонирования заключается в сканировании контрольной сетки с нанесенными на нее горизонтальными и вертикальными штрихами, расстояния между которыми известны с точностью 1–2 мкм. На полученном изображении измеряют «пиксельные» координаты xP, yP крестов контрольной сетки в системе oPxPyP (рис. 6.2), преобразуют их в линейную меру с учетом заданного геометрического разрешения и сравнивают полученные значения с точными координатами, отсчитанными по контрольной сетке. По найденным разностям координат соответствующих точек строят поле искажений, характеризующее все виды геометрическихискажений, вносимыхсканером в той или инойточке поля сканирования.
Впоследующем изображения, полученные с помощью этого сканера, могут быть исправлены в соответствии с параметрами поля искажений. Имеющиеся публикации свидетельствуют, что искажения фотограмметрического сканера можно уменьшить до 1 мкм.
Цифровые съемочные системы (сенсоры) появились только на рубеже веков.
Кэтому времени было достигнуто сопоставимое с фотоснимками геометрическое разрешение (5–6 мкм), появились средства хранения громадных объемов информации (порядка 1 Гб на каждый снимок), создана аппаратура стабилизации съемочной камеры в полете и высокоточного определения координат центров фотографирования.
Внастоящее время успешно эксплуатируются несколько цифровых камер, в частно-
сти: ADS40 (фирма LH-System, Швейцария), DMC2001 (фирма Z/I Imaging (США, Герма-
ния), |
HRSC |
|
|
|
|
Таблица 6.3 |
|||
(центр |
косми- |
|
|
|
|
||||
Наименование |
|
Характеристика камеры |
|
||||||
ческих |
ис- |
|
|
||||||
характеристики |
ADS40 |
DMC |
HRSC |
ЦТК-140 |
ЦТК-70 |
||||
следований |
|||||||||
Фокусное расстояние, мм |
62,5 |
120 |
47 - 175 |
140 |
70 |
||||
Германии DLR) |
|||||||||
Размер пиксела, мкм |
6,5 |
6 |
6 7 |
7 |
7 |
||||
и |
др., |
Число спектральных каналов |
6 |
12 |
5 |
1 |
4 |
||
обеспечивающи |
Радиометрическое разрешение, бит |
8 |
8 |
8 12 |
8 |
10/8 |
|||
е возможность |
Светочувствительный ПЗС-элемент |
линейка |
матрица |
линейка |
линейка |
линейка |
|||
получения |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
изображений как в видимой части спектра, так и в инфракрасном диапазоне. Имеются данные о Российских цифровых съемочных комплексах ЦТК-140 и ЦТК-70. Некоторые характеристики этих камер приведены в табл. 6.3.
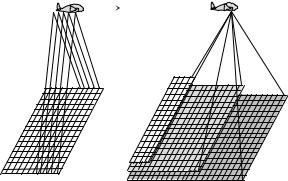
С точки зрения фотограмметрической обработки цифровых изображений, получаемых с помощью цифровых съемочных систем на ПЗС-линейках, чрезвычайно важны два обстоятельства:
1. Изображения формируются в результате сканирования местности в направлении, перпендикулярном направлению полета. Поэтому результатом съемки являются не кадровые снимки, а полосы изображений, так что стереоскопические наблюдения и
измерения возможны только по полосе перекрытия со смежным маршрутом (рис. 6.7, a). |
|
|||
|
|
2. Геометрия сканерных снимков не |
||
|
|
соответствует центральной проекции, поскольку |
||
|
|
каждая их строка формируется из собственного |
||
|
|
центра. Фотограмметрической обработке таких |
||
|
|
изображений предшествует преобразование их в |
||
|
|
форму, соответствующую законам построения |
||
|
|
изображений при центральном проектировании. |
||
|
|
Отсутствие продольных перекрытий сканерных |
||
|
|
снимков и невозможность создания по ним |
||
|
|
стереопар существенно снижают |
точность |
их |
а |
б |
фотограмметрической обработки, |
поэтому |
со- |
Рис. 6.7. Сканирование местности с записью |
|
|
|
|
результатов на одну (а) и три (б) ПЗС-линейки |
|
|
93 |
|
временные съемочные системы предусматривают одновременное применение нескольких ПЗС-линеек, каждая из которыхформирует изображение по определенномунаправлению (рис. 6.7, б).
Так, цифровая система ASD40 имеет в фокальной плоскости три ПЗС-линейки, одна из которых обеспечивает съемку полосы по направлению «вперед», вторая – полосы в направлении точки надира («вниз»), а третья – полосы «назад». Совместная обработка трех полос изображений позволяет получить продольные перекрытия и выполнить стереоскопические наблюдения.
Цифровая съемочная система HRSC (High Resolution Stereo Camera) с помощью девяти линеек ПЗС в фокальной плоскости объектива выполняет съемку одновременно девяти перекрывающихся полос, пять из которых используется для стереообработки, а остальные четыре обеспечивают получение изображения в том или ином оптическом диапазоне.
5. Стереоскопические наблюдения и измерения цифровых
изображений
Стереоскопические наблюдения двух изображений возможны при выполнении условий, полностью соответствующих сформулированным в Главе 6 и касающихся съемки с двух различных точек пространства, разномасштабности изображений, величины угла конвергенции главных оптических осей и тому подобное. Одним из основных условий получения стереоэффекта является требование наблюдения каждого снимка только одним глазом.
Как и в случае наблюдения аналоговых снимков, основными способами получения стереоскопического эффекта являются анаглифический, затворный, оптический и др., получившие в компьютерном исполнении новые возможности. Их реализация учитывает ряд особенностей работы с цифровыми изображениями, в частности: простота геометрических и фотометрических преобразований, формирование изображения на экране монитора с покадровым (page-flipping) или построчным (interlace) режимом выводом, наличие видеопамяти и др.
Анаглифический способ стереоскопических наблюдений не предполагает наличия какого-либо специального оборудования в виде плат или адаптеров, и требует наличия
лишь анаглифических очков. Наблюдаемая |
при этом стереоскопическая |
модель |
||
|
формируется по правилам, изложенным ранее для случая |
|||
|
наблюдения аналоговых снимков. |
|
||
|
Перекрывающиеся части левого и правого изображений, |
|||
|
образующие зону стереоскопических наблюдений (рис. 6.8), |
|||
|
окрашиваются в дополнительные цвета и выводятся на экран либо |
|||
|
по строкам (четные – левого снимка, а нечетные – правого), либо |
|||
|
путем наложения левого на правое. Полученное на экране |
|||
Рис.6. 8. Зона |
монитора совмещенное |
изображение рассматривается |
через |
|
анаглифические очки, стекла которых окрашены в те же цвета, |
||||
стереонаблюдений пары |
||||
снимков |
что и соответствующие им изображения снимков. В результате |
|||
наблюдатель видит пространственную модель местности, механизм возникновения которой был рассмотрен ранее применительно к получению стереомодели по аналоговым снимкам. В первом случае наблюдатель видит «разреженное» изображение, что снижает точность стереоскопических измерений, а во втором – цвет и оптическая плотность каждого пикселя суммарного изображения (элемента монитора), формируемые в зависимости от цвета и плотности накладывающихся пикселей изображений, что неизбежно ведет к некоторым потерям четкости. Однако в обоих случаях каждый глаз
94
наблюдателя видит только одно изображение, что и вызывает возникновение стереоскопической модели местности.
Затворный способ получения стереоскопического эффекта основан на специфике представления изображения на экране монитора и предполагает применение специальных
затворных (жидкокристаллических) очков с LCD-затворами (Liquid Crystal Display)
различных типов (ИБИК, NuVision, и др.), в которых стекла становятся прозрачными поочередно, в соответствии со сменой видеостраниц на экране монитора. Сущность способа заключается в следующем.
Изображения левого и правого снимков формируются на страницах видеопамяти и поочередно выводятся на экран монитора. Наблюдения выполняются через очки, представляющие собой пару плоскопараллельных пластин с заключенным между ними слоем жидкого кристалла, который при воздействии на него электрического импульса может изменять интенсивность проходящего через него света так, что в каждый момент времени наблюдатель воспринимает изображение на экране монитора только одним глазом, левым или правым. Поскольку смена страниц видеопамяти на экране монитора синхронизирована с изменением прозрачности пластин затворных очков при помощи специального канала связи, то наблюдатель видит либо прямой стереоэффект, либо обратный. Для смены прямого стереоэффекта на обратный и наоборот нужно изменить фазу, управляющую последовательностью вывода страниц видеопамяти.
Покадровый (page-flipping) режим стереонаблюдений предполагает поочередный вывод на экран левого и правого изображений синхронно со сменой прозрачности пластин затворных очков, установленных перед левым и правым глазом. Вывод полных изображений обеспечивает получение более высокого качества стереоизображения, но требует в целях обеспечения комфортности наблюдений для глаз достаточно высокой вертикальной частоты монитора (не менее 120 герц).
Построчный (interlace) режим стереонаблюдений предполагает деление кадра на два полукадра с чётными и нечетными строками соответственно. Правое и левое изображения стереопары выводятся на экран поочередно в «чётном» и «нечётном» полукадре, а синхронизируемые с вертикальной разверткой монитора затворные очки позволяют наблюдать два изображения «одновременно» и таким образом проводить стереоизмерения. Необходимым условием комфортной для глаз работы в этом режиме является достаточно высокая вертикальная частота монитора (как минимум 75 герц на «каждый глаз» – то есть примерно 150 герц при переключении в интерлейс).
Построчный режим применим только к |
|
|
экрану в целом, что приводит к некоторым |
|
|
неудобствам, например, при работе с меню. |
|
|
Другим недостатком является прореживание |
|
|
картинки и, как следствие, снижение разрешения |
|
|
в связи с использованием полукадров. |
|
|
Оптический способ стереоскопических |
|
|
наблюдений |
предполагает вывод зоны стереонаб- |
|
людений левого и правого снимков (рис. 6.9) со- |
|
|
ответственно в левую и правую части экрана. Оба |
|
|
изображения окрашены в естественные цвета, по- |
|
|
этому для их рассматривания и получения стерео- |
|
|
скопического эффекта нужно выполнить искусст- |
|
|
Рис. 6.9. Стереоприставка для |
||
венное разделение соответственных лучей, что |
наблюдения стереомодели |
|
достигается |
применением специальной сте- |
|
реоприставки, устанавливаемой перед монитором. Это обеспечивает возможность наблюдения стереоскопической модели местности и ее измерения, минуя неизбежные потери света при использовании некоторых других способов и приспособлений.
95
Имеются и другие способы получения стереоскопического эффекта по паре цифровых изображений, например, поляроидный, адаптированный к компьютерному построению модели и др.
Измерение построенной рассмотренными выше способами стереоскопической модели выполняют, как и в случае использования аналоговых изображений, монокулярным и стереоскопическим способами.
Монокулярный способ измерений используют при нанесении на снимки опорных точек, внутреннем ориентировании снимков и др. Применительно к обработке цифрового изображения монокулярные измерения сводятся к опознаванию нужной точки путем наведения на нее маркера, заменяющего измерительную марку стереокомпаратора. Считывание координат точки в системе растрового изображения oPxPyP (рис. 6.2) и преобразование их в ту или иную систему выполняется в автоматическом режиме.
Стереоскопические измерения выполняют способом мнимой марки, в качестве которой используют курсор, причем, оператор может выбрать любой из доступной палитры цвет его изображения, размер и форму (точка, крест, прицел, косой крест и пр.). С помощью специальных технологических приемов точность стереоскопических измерений может быть повышена до ⅓ ¼ от величины геометрического разрешения цифровых снимков.
6. Автоматическая идентификация точек цифровых снимков
(коррелятор)
Первые исследования в области автоматизации стереоскопических измерений были выполнены в МИИГАиК профессором А. С. Скиридовым в 1924–1932 гг. Полагая изображения достаточно малых участков снимков стереопары подобными, он предложил преобразовывать эти участки в электрические сигналы и, анализируя их, отождествлять (идентифицировать) соответственные точки. В то время это не получило развития из-за отсутствия технических средств, и в 1960 г. А. С. Скиридов возобновил свои исследования, приступив вместе с Г. Д. Федоруком к созданию изогипсографа – прибора для автоматической рисовки горизонталей.
Первый автоматизированный прибор, доказавший принципиальную возможность решения этой задачи, был разработан в 1950-х гг. по предложению Гаррисона фирмой Бауш и Ломб совместно с Научно-исследовательским топографическим отделом инженерных войск США. В последующем эти идеи были воплощены в целой серии фотограмметрических приборов – Стереомате (США), Аналитическом стереоприборе ОМИ-НИСТРИ (Канада), Аналитическом фотокартографе (СССР) и др.
Новый импульс получили идеи автоматизации с появлением ПЭВМ, дешевой электронной памяти, высокоточных сканеров и развитием теории машинного зрения. Применение этих и ряда других достижений науки и техники открыло путь к автоматизации широкого круга фотограмметрических задач, основанных на автоматической идентификации точек на перекрывающихся снимках.
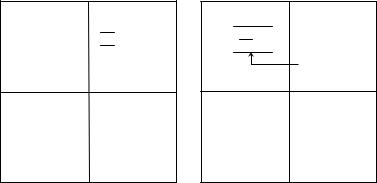
Образ R 


Левый снимок



 Образ R
Образ R
Зона
поиска
Правый снимок
В настоящее время идентификация точек на паре снимков рассматривается как статистическая задача распознавания изображений при наличии помех и искажений и решается на основе динамической теории зрения с использованием оптикоэлектронных или программных
Рис. 6.10. К автоматической идентификации точек |
96 |
|