Материал: 2334
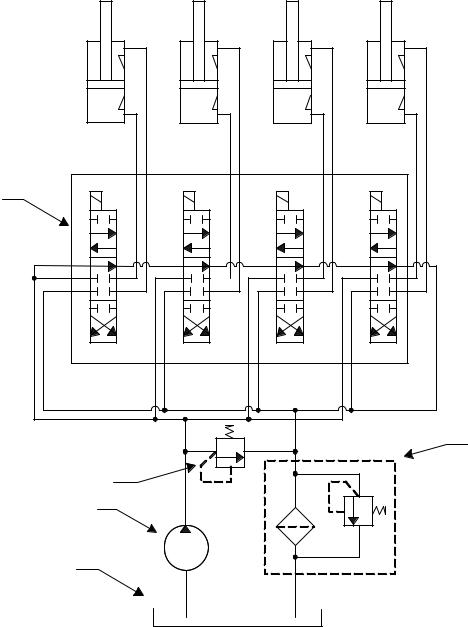
трогидрораспределителя 12 (каждая секция на рис. 1.6 обозначена со- |
||||
ответствующей буквой а, б, в, г), четырех исполнительных гидроци- |
||||
линдров 2, 3, 4, 5, фильтра 20, гидробака 21. Каждый гидроцилиндр |
||||
снабжен встроенным гидрозамком. Также в систему включен предо- |
||||
хранительный клапан 22. Все элементы имеют гидравлические соеди- |
||||
нения. |
|
|
|
|
|
2 |
3 |
4 |
5 |
12 |
а |
б |
в |
г |
|
||||
|
|
|
|
20 |
|
22 |
|
|
|
|
19 |
|
|
|
|
21 |
|
|
|
Рис. 1.6. Принципиальная гидравлическая схема устройства |
||||
Отличительными признаками данной модели от представленной ранее являются: расположение датчиков углов наклона, измерительные оси которых расположены перпендикулярно диагональным вер-
15
тикальным плоскостям платформы; наличие датчиков давления гидравлической жидкости в поршневой и штоковой полостях гидроцилиндров опор; наличие датчиков положения штоков гидроцилиндров опор; наличие блока аварийной остановки машины [33].
Полезная модель работает следующим образом. Перед началом работы машины оператор на пульте управления переводит тумблер в положение включения устройства, после чего блок включения/выключения 14 подает сигнал в БУ 11 (см. рис. 1.4). В дальнейшем устройство производит все манипуляции с гидроцилиндрами опор 2, 3, 4, 5 в автоматическом режиме. Выполняется выдвижение штоков выносных гидроцилиндров опор 2, 3, 4, 5. После контакта опор с поверхностью происходит вывешивание опорной платформы 1
вгоризонтальное положение. Причем опорная платформа выводится
втакое положение по высоте (условно «срединное» по запасам ходов штоков гидроцилиндров вверх и вниз), при котором возможна максимальная коррекция углов наклона платформы при последующем возможном ее «сползании» из-за проседания опор. Для этого выполняется непрерывное автоматическое поддержание платформы на заданной высоте, при которой достигается оптимальное сочетание значений запасов ходов штоков гидроцилиндров [33].
БУ 11 получает сигналы с датчиков угла наклона 6 и 7, которые пропорциональны углам наклона платформы по двум диагональным плоскостям. В БУ 11 поступают сигналы с датчиков положения штоков опор 8, эти сигналы пропорциональны положению штоков гидроцилиндров 2, 3, 4, 5. БУ 11 формирует управляющие сигналы для секций электрогидрораспределителя 12, которые управляют положением штоков гидроцилиндров опор 2, 3, 4, 5. В зависимости от положения опор изменяются углы наклона платформы 1 в горизонтальной плоскости.
Датчики давления 9 и 10 подают сигналы в БУ 11, пропорциональные давлениям в поршневой и штоковой полостях гидроцилиндров 2, 3, 4, 5. Данная информация позволяет судить о степени нагружения каждой из четырех опор. При возникновении аварийной ситуации БУ 11 останавливает рабочее оборудование машины. Для этого предусмотрен блок аварийной остановки 13, который срабатывает при подаче на него сигнала от БУ 11.
Работа ГС устройства осуществляется следующим образом. В нейтральном положении всех секций электрогидрораспределителя 12 поток рабочей жидкости от питающего насоса 19 поступает в гидробак 21 через сливную магистраль с установленным на ней фильтром
16
20. При подаче сигнала напряжения на одну из секций электрогидрораспределителя 12 происходит перенаправление потока жидкости в одну из рабочих полостей соответствующего гидроцилиндра 2, 3, 4, 5. В зависимости от полярности сигнала, подаваемого на определенную секцию электрогидрораспределителя, происходит выдвижение или втягивание штока соответствующего гидроцилиндра [33].
Встроенные гидрозамки гидроцилиндров служат для предотвращения аварийной ситуации при возникновении утечек в гидролиниях. Предохранительный клапан 22 служит для предотвращения аварийной ситуации, связанной с избыточным давлением в гидросистеме при возникновении неисправностей в гидрораспределительном блоке
[33].
Использование новых элементов (датчиков давления гидрожидкости в опорах) обеспечивает возможность отслеживать степень нагружения опор и предотвращать аварийные ситуации. Использование новых элементов (датчиков положения штоков опор) обеспечивает возможность поддержания опорной платформы на заданной постоянной либо переменной высоте, позволяет избегать выдвижения штоков на максимальную длину, а также касания колесами машины опорной поверхности. Это повышает запас управляемости углами наклона платформы [33].
Использование по-новому сориентированных (в диагональных вертикальных плоскостях опорной платформы) датчиков угла наклона обеспечивает возможность устранения угла наклона платформы в каждой диагональной вертикальной плоскости 16 независимо (см. рис. 1.5), причем одновременным выдвижением одной диагональной опоры и втягиванием другой. Кроме того, гидравлическая схема заявляемого устройства в отличие от прототипа допускает приведение в действие одновременно всех четырех гидроцилиндров (см. рис. 1.6). Это повышает быстродействие устройства и гарантирует автоматическое выравнивание за один этап горизонтирования [33].
1.3. Обзор технических характеристик датчиков угла наклона
Инклинометр (датчик наклона) – это датчик, предназначенный для измерения наклона различных статических (строительные объекты и конструкции, крупные механизмы) и, до определенной степени, динамических объектов (подъемные краны, экскаваторы) относительно гравитационного поля Земли. Подобные датчики весьма широко
17
используются при строительстве железных дорог, автомагистралей, мостов, опор крупных генераторов и т.д. При изменении угла наклона пропорционально изменяется сигнал на выходе датчика. Выходной сигнал может быть по току, по напряжению или цифрового типа (RS232 или RS485). Дальнейшая обработка этого сигнала может быть произведена в различного рода измерительных приборах, управляющих системах и т.д. Сам принцип работы инклинометра основан на воздействии гравитационного поля Земли на его чувствительный элемент. Если контролируемый объект не находится в статическом состоянии, то показания датчика являются результатом взаимного воздействия как вектора земной гравитации, так и всех векторов ускорения и вибрации, которые на данный объект воздействуют. Все датчики наклона можно условно разделить на три основные группы: это одноосевые (ось X), двухосевые (оси X и Y) и трехосевые (оси X,Y и Z) датчики.
В настоящее время на рынке широкое распространение получили следующие инклинометры:
1.Инклинометры GNAMG, выпускаемые фирмой «Baumer IVO». Датчики предназначены для двухосевого высокоточного измерения угла наклона. Применение цифрового интерфейса позволяет передавать точные значения угла наклона, производить удаленное конфигурирование, делать предустановки с выдачей управляющего сигнала на исполнительное устройство. Программируемые параметры датчика: разрешение, предустановки, прохождение среднего значения. Измерительный цикл 10 Гц, установка показаний – не более
0,5 с.
Простота монтажа и разнообразие интерфейсов дают возможность использовать эти датчики не только на стационарных, но и на подвижных объектах в таких областях применения, как определение положения высотных сооружений, плотин, стволов шахт, платформ, определение величины прогибов и деформаций опор и балок мостовых и туннельных конструкций, контроль углов наклона автомобильных и железных дорог. Кроме того, решаются такие технически сложные вопросы, как определение крена транспортных средств на суше и на воде, в том числе для строительных и сельскохозяйственных машин. Инклинометры нашли свое применение в судостроении, в нефтедобывающей, перерабатывающей промышленности, в машиностроении, а также в системах безопасности и сигнализации.
2.Инклинометры типа STS-003, выпускаемые фирмой ЗАО «Росприбор». Диапазоны измерения наклона составляют до ± 90°, ис-
18
пользуются одна или две оси измерения. Характерны высокая точность, высокое разрешение. Выход возможен по току или по напряжению. Датчик компактный, ударопрочный, степень его защиты IP68. Используется чувствительный элемент на основе пьезокерамики, однако не рекомендуется использовать подобные датчики на объектах с повышенной вибрацией.
3.Датчики угла наклона серии РФ711, выпускаемые фирмой
ООО«РИФТЭК». Подобный датчик выполнен по технологии микромеханики и может применяться для измерения углов наклона в системах контроля, управления и навигации.
4.Инклинометры серии NS, выпускаемые фирмой «HLPlanartechnik». Используется кондуктометрическое измерение угла наклона. Особенность этого патентованного принципа измерения состоит в том, что он базируется на измерении объема.
Фирма «HL-Planartechnik GmbH» предлагает данные датчики в нескольких разных исполнениях. Наряду с базовым модулем NS25/B2 для «Through Hole»-монтажа, оптимизированным для разных диапазонов угла наклона и разной вязкости электролита, предлагается также модуль NS-25/C2 для SMT-монтажа.
Фирма «HL-Planartechnik GmbH» предлагает также датчики угла наклона в виде сенсорных модулей в исполнениях в виде монтажной платы или в керамическом корпусе с интегрированной электроникой. Эти модули отличаются низким током потребления и легко адаптируемой электроникой. Для работы датчиков необходимо лишь подключить питание, и на выходе появляется сигнал, пропорциональнозависимый от угла наклона.
Сенсорный модуль выходит от изготовителя полностью откалиброванным. Таким образом, при приобретении подобного модуля потребителю предоставляется возможным сразу же встраивать его в свой системный корпус. Модульное исполнение сенсора предполагает его использование в серийном производстве заказчика со средними и большими объемами производства. В распоряжение заказчика предоставляется ряд сенсорных модулей с различными выходными сигналами (интерфейсами), количеством измеряемых координат и конструктивным исполнением. Из этого большого количества можно выбрать оптимально подходящий сенсор для каждого конкретного случая применения.
5.Датчики угла наклона серии SBL1S, выпускаемые фирмой
«Seika Mikrosystemtechnik GmbH».
19